基于Zernike矩的亞像素邊緣檢測改進算法
2012-10-12 13:29:18胡樹杰
制造業自動化 2012年9期
關鍵詞:方法
胡樹杰
HU Shu-jie
(沈陽理工大學 信息科學與工程學院,沈陽 110168)
0 引言
物體的邊緣無論是對人類的視覺系統還是對數字圖像處理技術都具有非常重要的意義,它是圖像的基本特征。一般有三種亞像素邊緣定位方法:分別是擬合法,插值法和矩法[1~3]。對于擬合法,是根據已給出的邊緣模型,通過擬合圖像的灰度范圍得到亞像素邊緣位置[4~6]。該法準確性高,但缺點是比較耗時。插值法是依據實際圖像的灰度分布,通過插值圖像數據完成了亞像素邊緣定位,該方法優點是節省時間,但對噪聲比較敏感[7,8]。由于矩是積分算子并對噪聲不敏感,因此矩法成為了一種被廣泛應用的方法。
Zernike矩和Zernike多項式被廣泛應用于圖像處理應用中。Zernike矩是以Zernike多項式為核函數的矩,Zernike多項式構成了一個完備的正交集。Zernike多項式的正交性使得Zernike矩互相獨立,Zernike矩的幅值對旋轉是不變的。因此Zernike矩使它在特征表達式和低的噪聲敏感度等方面具有較大的優越性,并且不用考慮形狀的較小變化。另外由于基是正交的,它們有較小的信息冗余[9~11]。
但在高階矩中,盡管它們的整體性能優越,仍然具有較高的計算成本和數值不穩定性。為了降低計算成本,Chong等人開發出一種命名為q-recursive的新方法[12],另一種有效的方法是Prata法[13]。在本文中,重新分析了Prata遞歸法,提出來一個改進的Prata算法。通過分析,改進的Prata算法在每次遞歸中算術運算最少,因此在所有方法中改進的Prata法速度最快。
1 ZMs遞歸方法的計算
1.1 Zernike矩
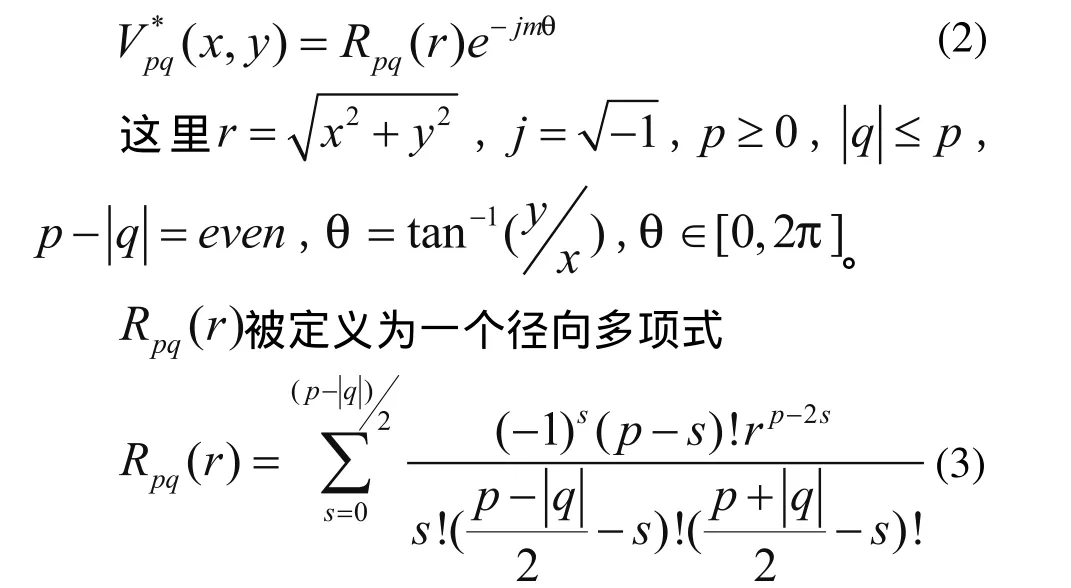
在單位圓中圖像函數f(x,y)被定義在p和q的二維坐標系中

這里f(x,y)是大小為N×N離散區域中的圖像函數,復雜的Zernike多項式為
1.2 q-recursive法
在計算帶有多個變量的多項式時q-recursive法是一種最快的算法,重復的次數不依賴于多項式的階次。方法如下:
這里
另一個指數q在式(6)的括號中以表明它是頻繁變化的系數。該方法具有明顯的優勢,當給定一個特定的階次p和重復系數q時,這對低階多項式是不需要的,并不適用于其他三個方法。圖1描繪了改進的方法。
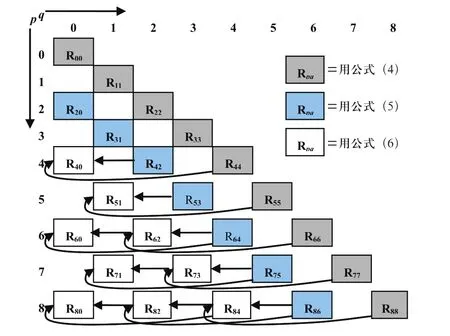
圖1 q-recursive算法的流程
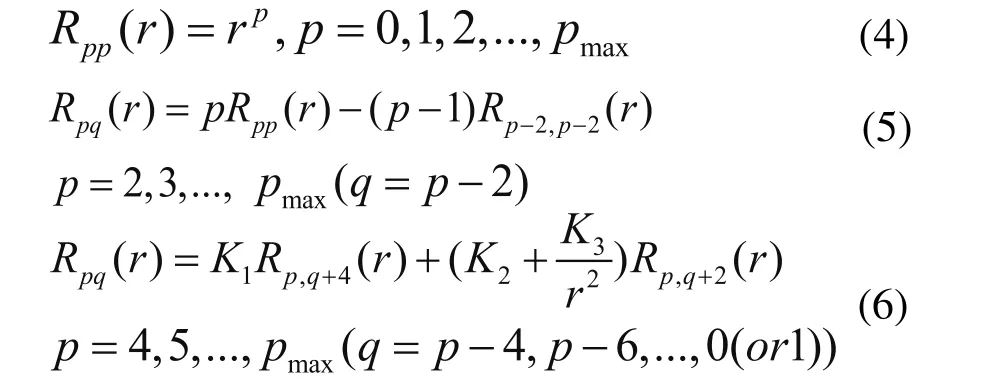
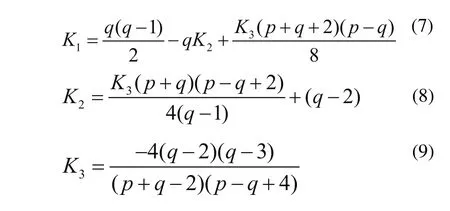
1.3 Prata法
Prata算法用低階多項式Rp-1,q-1(r)和Rp-2,q(r)導出一個高階多項式Rpq(r)。當q=0,p≠q 時,用式(3)導出Rpq(r);當p=q 時,關系式。下面給出具體的算法:
用式(3)計算

2 改進的Prata算法
有了Rpq=Rp,-q,就可以避免求多項式 ,而直接使用徑向多項式Rp,0(r),p=2,4,...,pmax。現介紹改進的Prata法,如下式:

3 實驗結果與分析
在此我們測試了所提出方法的性能。圖2(a)作為原始圖像,我們對比了q-recursive和Prata法的部分圖像的亞像素邊緣位置。結果如圖2所示。表1列出了Prata法,q-recursive法和改進的Prata法執行時間,所有矩達到最大階次時CPU流逝的時間。
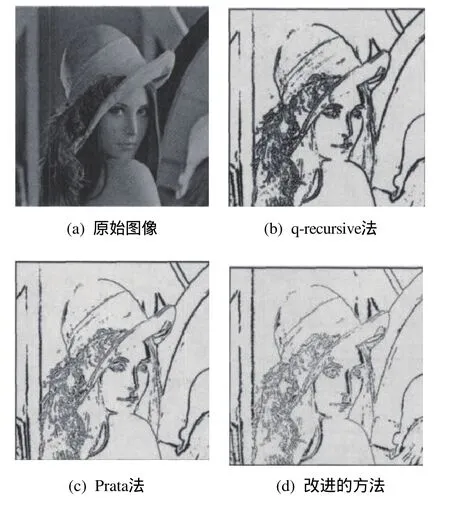
圖2 亞像素邊緣的結果
實驗結果表明所提出的方法在準確率上明顯優于其他兩種方法。這意味著所提出的方法中的邊緣參數更準確。此外,還可以看出Prata法在執行時間上是最快的,因此改進的方法在速度上的改善是非常有意義的。同時可以清楚的看到改進的Prata法的階次由降低為
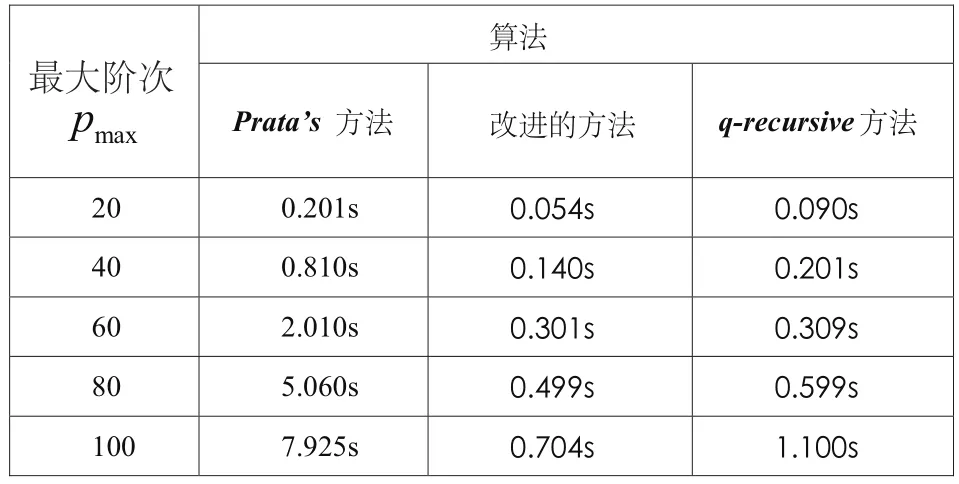
表1 不同算法的時間對比
4 結論
本文提出了一種基于Zernike正交矩的亞像素邊緣檢測法,該方法采用了對ZMs計算的快速遞歸法,并修改了Prata遞歸法,降低了時間復雜度,由到。從實驗結果看,所提出的方法更快更準確,我們用所提出的方法進行亞像素邊緣定位可以得到比較滿意的結果。此外,對計算目標的幾何參數和使用邊緣點的情況,如校準、匹配等,該新方法都是非常有效的。
[1]陳天華.數字圖像處理[M].北京:清華大學出版社, 2007.
[2]ANILK.數字圖像處理基礎[M].北京:清華大學出版社,2006.
[3]朱虹,等.數字圖像處理基礎[M].北京科學出版社,2005.
[4]Tinku Acharya,Ajoy K.Ray.數字圖像處理基礎原理與應用[M].北京清華大學出版社,2007.
[5]J.Ye,G.K.Fu,U.P.Poudel.High-accuracy edge detection with blurred edge model,Image and Vision Computing 2005,23(5):453-467.
[6]F.Bouchara,S.Ramdani.Subpixel edge refinement using deformable models,Optical Society of America 2009,26(4): 820-832.
[7]L.Zhang,X.L.Wu.An edge-guided image interpolation algorithm via directional filtering and data fusion.IEEE Transactions on Image Processing 2006,15(8)2226-2238.
[8]T.Hermosilla,E. Bermejo,A. Balaguer,L.A.Ruiz.Non-linear fourth-order image interpolation for subpixel edge detection and localization,Image and Vision Computing 2008,26(9):1240-1248.
[9]S.O.Belkasim,M.Shridhar,M.Ahmadi.Shape recognition using zernike moments invariants,in: Proceedings of 23rd Annual Asilomar Conference on Signals Systems and Computers,1989:167-171.
[10]S.Ghosal,R.Mehrotra.Zernike moment based feature detector,in: Proceedings of International IEEE Conference on Image Processing (ICIP-94),vol.1,1994:934-938.
[11]L.Wang,G.Haealey.Using Zernike moments of the illumination and geometry invariant classification of multispectral texture, IEEE Trans. Image Process.1998,7(2):196-203.
[12]C.-W Chong,R. Paramesran.R. Mukundan.A comparative analysis of algorithms for fast computation of Zernike moments,Pattern Recognition 2003,36.731-742.
[13]A.Prata,W.V.T.Rusch.Algorithm for computation of Zernike polynomials expansion coefficients,Appl. Opt. 281989:749-754.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
