基于機器視覺的六自由度機器人自動示教系統研究
2012-10-12 13:29:16歐習洋侯興哲馬紅斌
制造業自動化 2012年9期
關鍵詞:機械
歐習洋,侯興哲,鄭 可,吳 華,馬紅斌,蔣 明
OU Xi-yang1, HOU Xing-zhe1, ZHENG Ke1, WU Hua1, MA Hong-bin1, JIANG Ming2
(1.重慶市電力公司 電力科學研究院,重慶 401123;2.綿陽固創科技有限責任公司,綿陽 621010)
0 引言
各種六自由度機械臂由于其運動的靈活性及其機構設計的合理性,在目前的自動化生產系統中得到廣泛的應用[1]。在機械臂投入使用之前或者當處理環境改變時,必須對六自由度機械臂進行示教[2]。在實際工作中,對六自由度機械臂進行示教非常繁瑣和費時。因此,為了提高示教速度,絕大多數的機械臂控制系統都提供了操作便捷的示教盒,但是這種方式仍然無法從根本上提升六自由度機械臂的示教效率[3,4]。
隨著計算機技術和圖像處理技術的快速發展,機器視覺在工業環境中得到了越來越多的應用,如光學檢測、視覺導航以及智能監控等[5]。通過在處理環境中設置合適的定位標志物,使用機器視覺技術提供定位輔助系統,這對提高機器人智能水平和環境適應能力提供了良好的技術支撐[6]。因此,在多自由度機械臂示教過程中,通過機器視覺和路徑規劃實現自動的示教,替代傳統的手工示教方式,是提高示教效率的根本途徑[7]。
本文針對六自由度機械臂抓取物料架上物體的工作任務,通過在物料架上設置定位標志物,基于機器視覺基本原理和六自由度機械臂運動學正反解技術,設計全自動的視覺反饋示教系統。
1 物料架定位標志識別
如圖1所示是實際采集到的某物料架圖片。物料架固定在地面上后一般位置不會發生變化,本文研究的目標是通過安裝到機械臂末端的視覺系統識別出物料架上的LED指示燈(黑色圈中)并計算其位置,自動生成機械臂的示教路徑。因此,必須通過圖像處理技術識別物料架上的指示燈并實現其精確定位。這個工作分解為兩步實現,首先通過初步定位排除干擾因素影響,得到LED指示燈的粗略范圍,其次再精確定位兩個指示燈的位置,并計算其中點坐標。
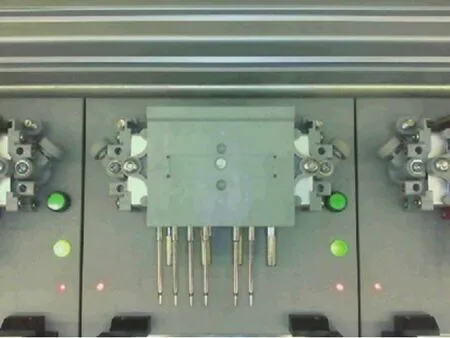
圖1 實際采集的某物料架圖片
如圖1所示物料架上同時可能存在三個以上的LED指示燈,需要識別并定位的僅是位于兩條邊線之間的LED指示燈,其它指示燈視為干擾信息。可以通過對兩條邊線的識別將指示燈的識別區域限定在邊線之間。為了提高可靠性,本文通過對亮度圖進行sobel算子處理,然后分別在左、右半圖上進行列掃描,統計亮度總和最大的列,即認為是左右邊線。處理結果如圖2所示。
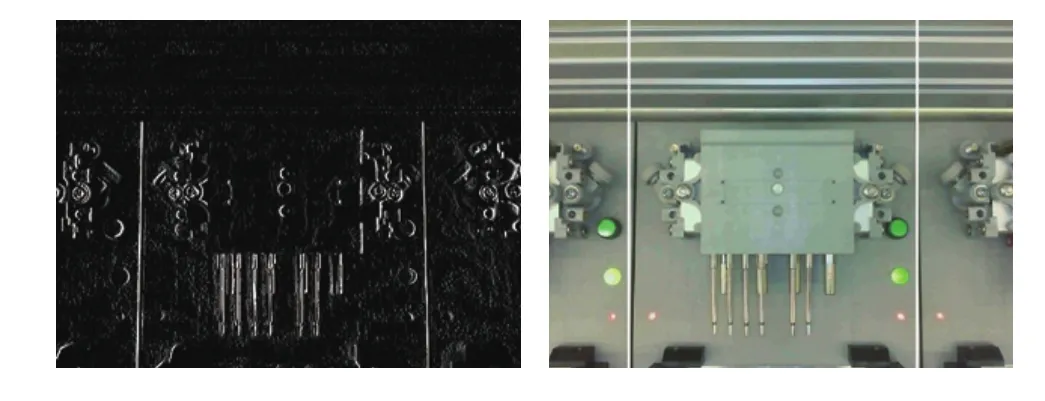
圖2 對亮度圖進行sobel處理(左)以及通過列掃描得到的邊線識別結果(右)
為了進一步縮小LED指示燈的搜索范圍,在圖2的基礎上對圖1進行通道分離,得到紅綠色差圖如圖3左圖所示。然后搜索兩條邊線之間的最亮區得到LED指示燈所在的大概范圍(黑色矩形內),如圖3右圖所示。
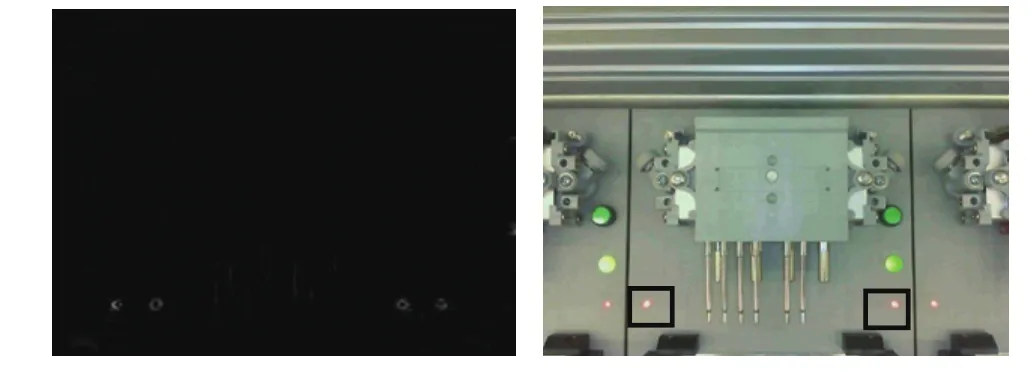
圖3 紅綠色差圖及初步定位范圍
在圖3右圖的初步定位基礎上,提取出LED指示燈所在區域的亮度圖,再進行二值化處理,得到圖4所示的處理結果。然后通過重心法計算得到指示燈二值化圖的重心位置,該重心位置就是指示燈最后的精確定位位置。定位結果如圖5中黑色圓圈所示。
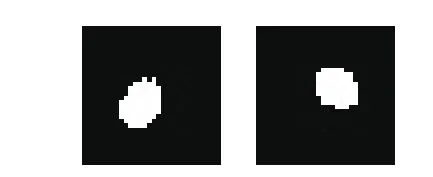
圖4 LED指示燈亮度圖二值化
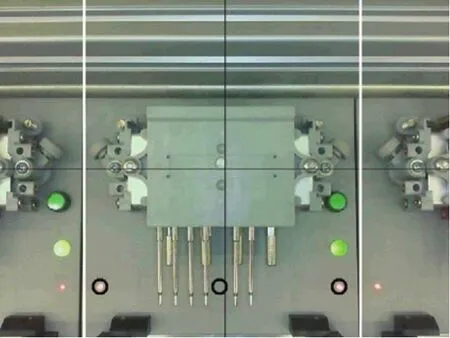
圖5 指示燈的精確定位結果
2 六自由度機械臂的自動示教路徑生成
通過控制每個軸的關節角度或者給定末端的位姿的方式,設計機械臂運動的通用路徑作為軌跡模板,然后針對每個單獨的物料架,根據視覺系統得到的指示燈精確位置以及給定的標準位置之間的偏差(包括x方向和y方向),調整通用路徑的最后幾個示教點的坐標位置,從而生成一條針對每個單獨物料架的實際運動路徑。
2.1 機械臂的運動學正反解
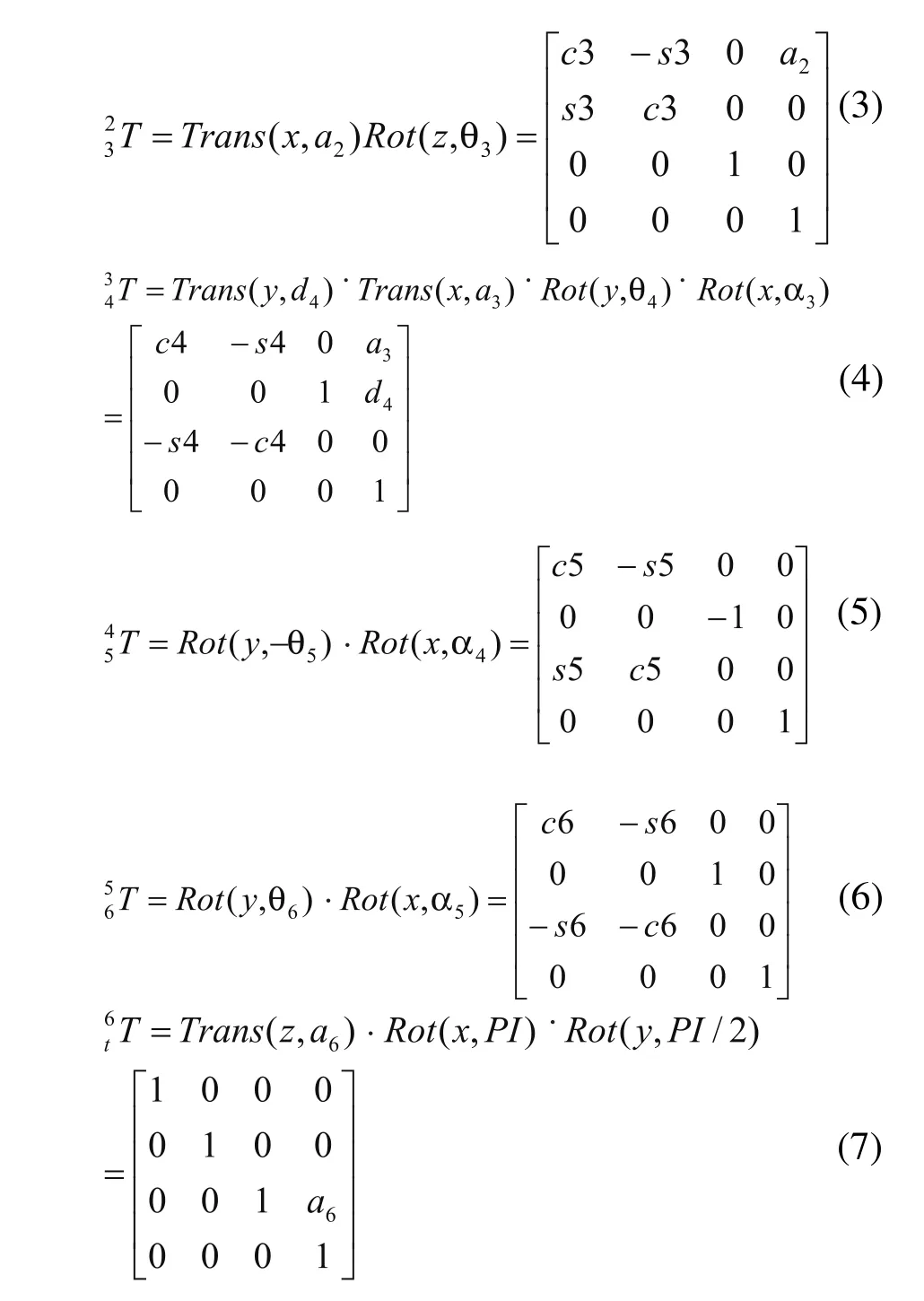
機械臂進行示教或者實際按照某條給定軌跡運動時,最終由關節的轉動實現。因此,為了進行高效的示教或者運動軌跡規劃,首先需要實現機械臂的運動學正反解,即由機械臂每個關節的角度得到機械臂末端的位姿(正解)或由末端位姿計算得到每個關節的角度(反解)。其中,反解一般有8組解,需要根據前一時刻的機械臂關節角度信息以及給定的性能函數,選擇其中最優的一組解。圖6所示是本文采用的六自由度機械臂非標準D-H坐標標示原理,D-H參數如表1所示,坐標變換矩陣分別如式(1)~(7)所示。
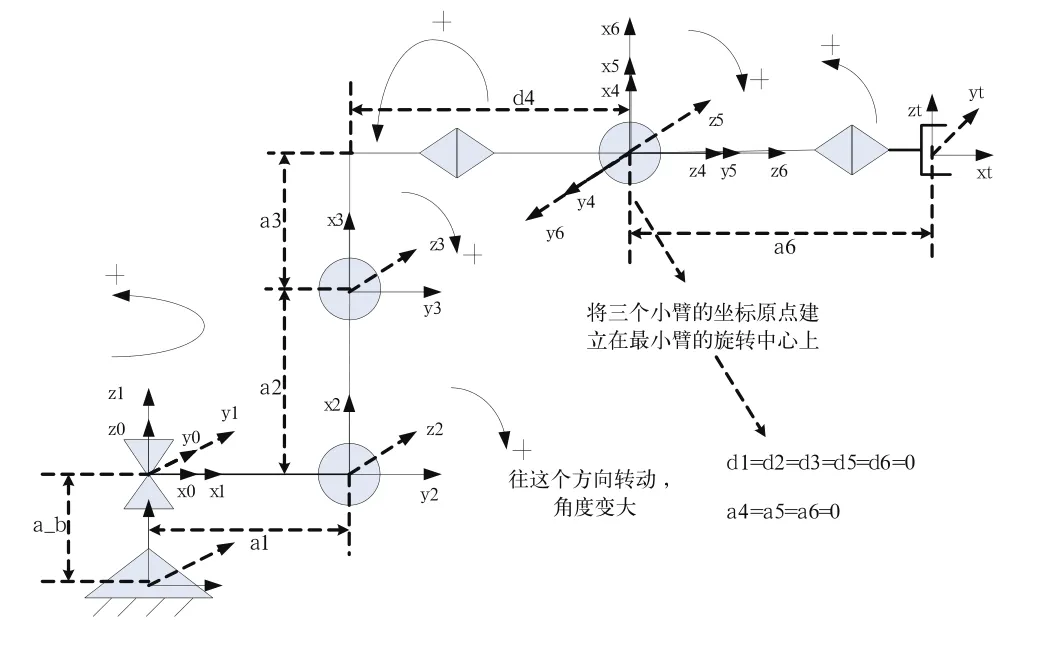
圖6 六自由度機械臂的非標準D-H坐標表示
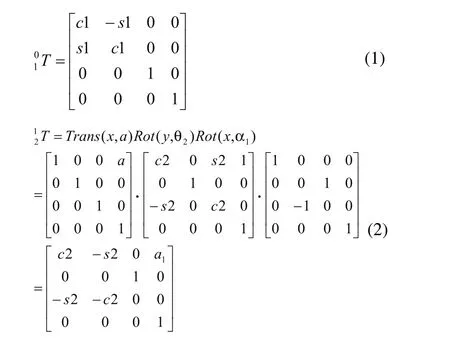
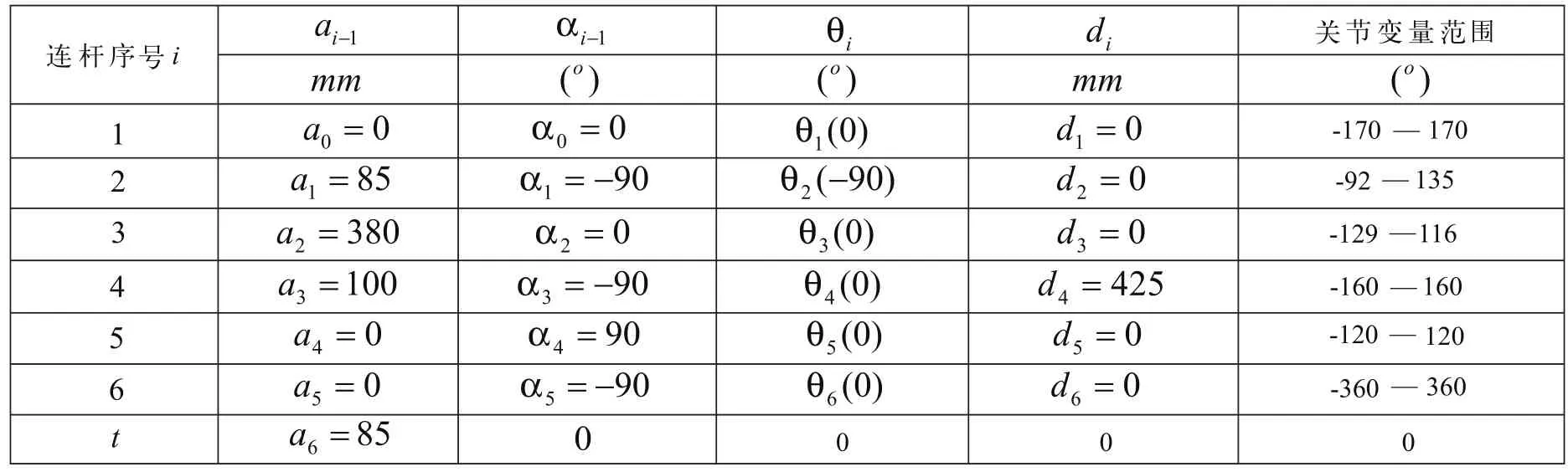
表1 六自由度機械臂的D-H參數
2.2 末端路徑的自動修改和示教路徑的自動生成
如圖7所示為機械臂與物料架之間的位置關系,機械臂底盤可以在滑軌上移動,該滑軌與物料架的排列方向一致,所以根據視覺系統得到的指示燈x方向的位置偏差,修正機械臂底盤的位置即可實現機械臂在x方向上與物料架的對準。物料架與z軸的夾角為 ,根據得到的指示燈y方向的位置偏差erry,可以對機械臂通用運動軌跡的最后1~2個示教點按照式(8)進行修改,從而實現針對某個物料架的示教路徑自動生成。通過編制自動示教程序,讓機械臂沿著滑軌移動一遍,在每個物料架前重復上述自動示教過程,則可快速生成全部的示教路徑,實現高效的全自動示教。

2.3 實驗結果
根據所提出的基于視覺自動示教系統對具有60個物料架的物料平臺進行自動示教路徑生成,在實際運行過程中,六自由度機械臂直接利用生成的示教路徑對物料架上的物體進行抓取等操作時,機械臂的末端執行器具有非常高的位置精度,操作的可靠性得到較大提高。使用傳統方式實現60個物料架的機械臂示教,大概需要10個小時,而采用本文的自動示教系統只需要10分鐘,示教的可靠性也能得到很好的保證。實際運行結果表明本文所提出的基于機器視覺的自動示教系統具備高效率和高可靠性,適合應用到工業上的六自由度機械臂的自動示教中。
3 結論
本文通過圖像處理技術得到物料架上定位標志物的精確位置偏差信息,利用該偏差信息修改通用運動路徑的示教點,實現六自由度機械臂物體抓取的示教路徑自動生成。實際運行情況表明該自動示教系統在保證可靠性的前提下,能較大提高示教速度,比傳統的手工示教方法具有明顯的優越性。
[1]馬江.六自由度機械臂控制系統設計與運動學仿真[D].北京工業大學,2009.
[2]馬強.六自由度機械臂軌跡規劃研究[D].哈爾濱工程大學,2007.
[3]彭雪峰.基于遺傳算法的六自由度機器人焊接路徑規劃[J].自動化技術與應用,2011,12:1-3.
[4]鹿毅,吳洪濤.基于Mathematica的六自由度焊接機器人運動學分析仿真[J].煤礦機械,2011,6:124-126.
[5]李二超,李戰明,李煒.基于視覺的機器人模糊自適應阻抗控制[J].中南大學學報,2011,2:409-413.
[6]魏明明,汪焰恩.基于計算機視覺反饋的AGV定位停車研究[J].機床與液壓,2011,15:35-37.
[7]雷永剛.基于圖像的移動機器人視覺伺服系統研究[D].河南科技大學,2011.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
