風機電力系統小干擾穩定域的研究
2012-10-11 02:58:32劉書成
黑龍江電力 2012年3期
劉書成
(東北電力大學電氣工程學院,吉林吉林132012)
0 引言
隨著能源危機的不斷加深,新能源的利用和開發也越來越受到人們的重視和青睞,風能作為一種清潔能源被納入中國的能源長期規劃范圍之內[1]。由于風能具有一定的隨機性,并入電力系統之后會給系統帶來一定的沖擊。因此,研究合理的風機接入容量的問題成為一個亟待解決的現實問題。而其中的重要一方面就是需分析風機接入后系統的穩定性的問題。對此,許多學者曾做出一些深入的研究[2-4]。如文獻[5]分析了在不同運行狀態下,風電并網前后互聯系統的小干擾穩定性變化,對實際的穩定性分析提供了理論依據;文獻[6]推導了雙饋機組小干擾穩定的數學模型的基礎上,以通遼外送型電網接入大規模風電為例,系統研究大規模風電外送對電力系統小干擾穩定的影響;文獻[7]利用DIgSILENT/PowerFactory進行頻域分析和時域仿真,分析異步風電機組對電力系統小干擾穩定性及阻尼特性的影響;文獻[8]考慮同步發電機勵磁調節系統動態行為的全系統狀態矩陣公式;利用特征值分析法,分析了系統的小干擾穩定性。基于此,本文先介紹小干擾穩定分析的線性化理論,給出小干擾穩定域的條件,然后推導風機與同步機并聯的系統的小干擾分析的雅克比矩陣,通過改變風機的輸入功率和原動機的機械功率,得到對應的小干擾穩定域。
1 小擾動穩定域的邊界
對同時含有微分方程和代數方程的非線性系統,數學表達式為

式中:x為系統狀態變量;y為代數變量;p為控制變量。對系統式(1)在平衡點處線性化,可得:

式中:fx、fy、gx、gy分別為函數對狀態變量和代數變量的偏導數。
若矩陣gy非奇異,則式(2)可寫為

式中:A(p)=fx-fygy-1gx。
當gy非奇異且A(p)的特征根具有負實部時,得出的小擾動穩定域是穩定的。
根據式(3)的方程,選擇適當的算法得到穩定域的步驟如下:
1)選定需要變化的參數值,將其它參數設定為常數。
2)確定參數的初始點,一般選擇系統穩態的參數值作為初始值。
3)在對應的參數空間中,從初始點沿某個特定的方向,并以適當的步長改變系統的參數值,得到給1個點對應的雅可比矩陣特征值。
4)當參數出現1對共軛純虛特征值且其余特征值均有負實部時,系統發生HB,記錄此時的參數,并停止該方向的搜索。
5)改變3)步驟中搜索邊方向,重復3)和4)步驟,得到新的邊界點。該方法在參數空間(p1,p2)中占用較多的計算時間,但具有較好的準確性,可根據上個步驟的特征值自適應地調整步長,進而增加該方法的靈活性。
在具有多個發電機的電力系統中,若考慮發電機注入功率為分岔參數時,對應的小干擾穩定域比發電機臺數少一維的超平面;當SSSR的維數大于三維時,已經失去了直觀形象的優點。常見的方法是將其投影到低維平面中,使其具有一定的實用價值,但也喪失很大一部分的有用信息。1個有價值的方案是按照二機等值的方法,將n-1維的曲面投影到n-1個2維空間上,節省了計算量,具有直觀的物理意義[9]。
2 含有異步風機的電力系統
2.1 異步風力發電機組數學模型
2.1.1 風力機數學模型
風力機機械功率為

風力機機械轉矩方程為

式中:PW為風力機機械功率;TW為風力機機械轉矩;r為風力機葉輪半徑;ρ為空氣密度;β為槳距角;λ=rω/v為葉尖速比;ω為風力機轉速;Cp為風能轉換效率系數;v為風速。
連接葉片和齒輪箱的輪轂,有較大慣性,其兩邊的轉矩可用一階慣性環節模擬,其表達式為

式中:Tt為輸入齒輪箱的機械轉矩;τh為輪轂的慣性時間常數。
齒輪箱和聯軸器傳遞風力機和異步發電機間的轉矩,其方程表達式為

式中:Tm為齒輪箱輸出轉矩;Tt為異步發電機輸入轉矩;ττ為齒輪箱慣性時間常數。通常認為風力機轉速基本保持不變,有 Tm≈Tt。
傳動部分模型方程表達式為

式中:τw為風力機慣性時間常數。
2.1.2 槳距角控制系統數學模型
通過調節葉片槳距角,使風力機跟蹤 Cp達到最大值,提高風能利用效率。槳距角控制系統通常表示為

式中:β0為槳距角初始值;τβ為槳距角控制系統的慣性時間常數。
2.1.3 異步發電機組數學模型
簡單的風機系統的方程主要包括定子電壓方程、機電暫態方程以及轉子電壓方程等。
定子電壓方程形式為

機電暫態方程形式為
而發電機的暫態電抗為
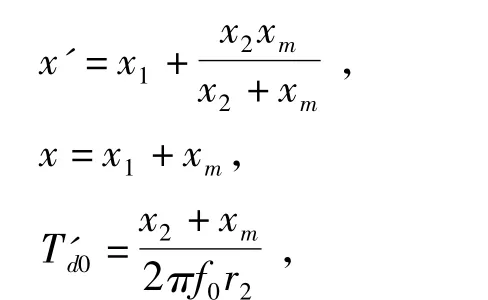
式中:Ud、Uq分別為發電機定子電壓 d、q軸分量;Id、Iq分別為定子電流 d、q 軸分量;E′d、E′q分別為暫態電勢 d、q軸分量;T′d0為定子開路時間常數;r1、r2、xl、x2、xm分別為異步發電機定子電阻、轉子電阻、定子電抗、轉子電抗和激磁電抗標么值。
轉子運動方程為

式中:τj為異步發電機的慣性時間常數;s為轉率差;Te為電磁轉矩。
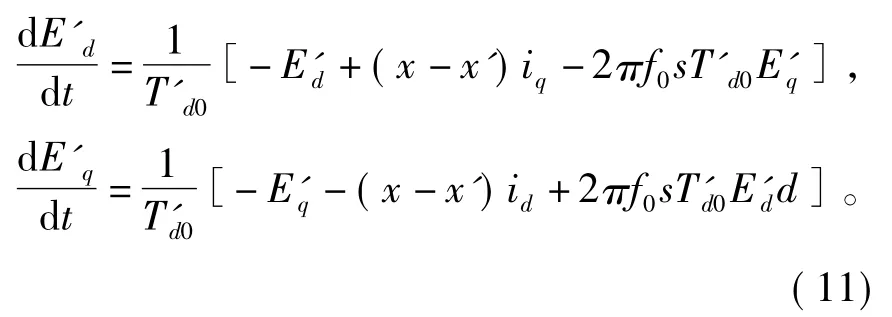
將式(13)線性化方程為

整理上述微分方程,并對其進行在平衡點處進行線性化分析,得到以 Δβ、ΔTt、Δs、ΔE′d、ΔE′q為狀態變量的異步風電機組狀態方程為
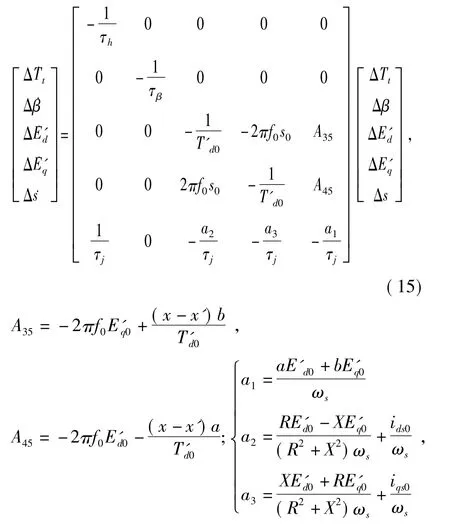
式中:ids0、iqs0為定子電流的 d、q 軸分量;E′d0、E′q0為暫態電勢的d、q軸分量。
將式(15)簡寫為

2.2 同步發電機組數學模型
同步發電機的三階模型為
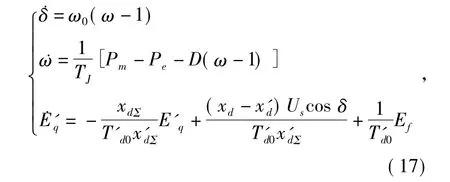
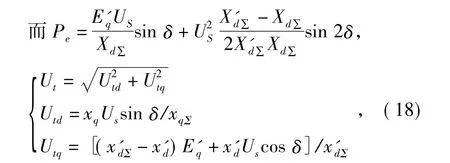
式中:δ為發電機功角;ω為發電機轉速;ω0為發電機的穩態轉速;TJ為機械轉動慣量;D為機械阻尼系數;Pm為原動機機械功率;Pe為發電機電磁功率;Eq為q軸暫態電勢;Ef為勵磁的控制輸入;Td0′為發電機定子開路時勵磁繞組的時間常數;Ut為發電機機端電壓;Us為無窮大母線電壓;xd為發電機的d軸同步電抗;xd∑為計入了輸電系統總電抗后的d軸總同步電抗;xd′為發電機d軸暫態電抗;xd∑′為計入了輸電系統總電抗后的d軸暫態總電抗。
對其在平衡點處進行線性化,可得到類似于式(15)的矩陣,將其寫為
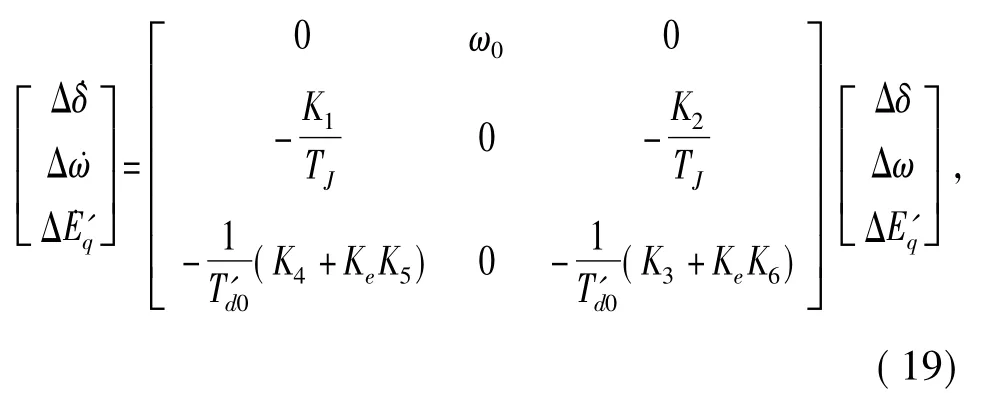
式中:(19)式的參數的形式和含義見文獻[11]。
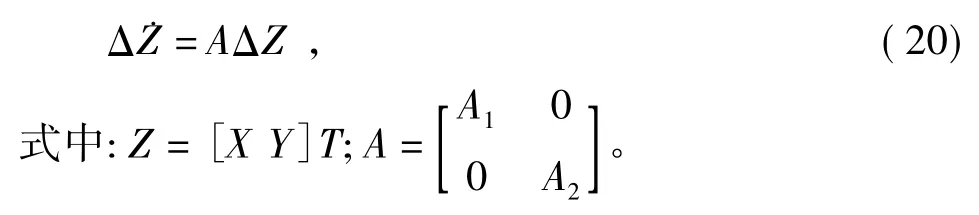
式(19)同樣可以簡寫為
ΔY˙=A2ΔY。
將式(15)和式(19)聯立,可得
3 算例分析
3.1 系統的主要參數
為了驗證本文算法的有效性,特引入1組風機與單臺同步機并聯的系統,然后與輸電線路域無窮大系統相連。算例系統如圖1所示。其中,1組風機可以簡化為單臺的異步發電機,具體的等值方法見文獻[10]。同步機的主要參數如下:
線路及變壓器的參數為

單臺異步風力發電機的主要參數如下:

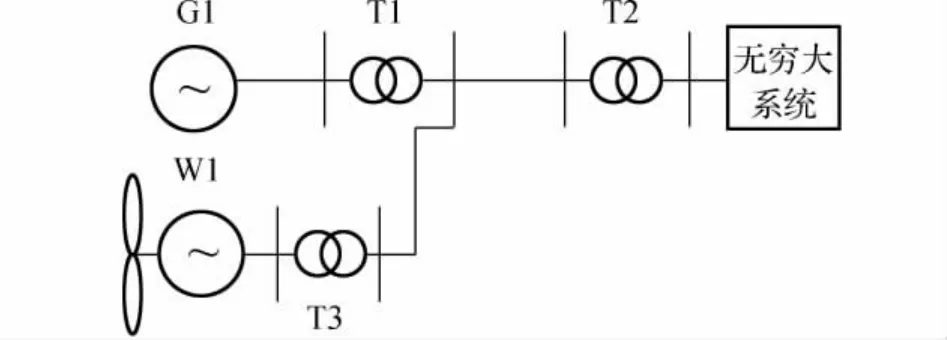
圖1 算例系統
分別令風機的輸入機械功率PW和發電機的輸入機械功率Pm為自變量,根據式(3)可得到對應的小干擾穩定域,如圖2所示。
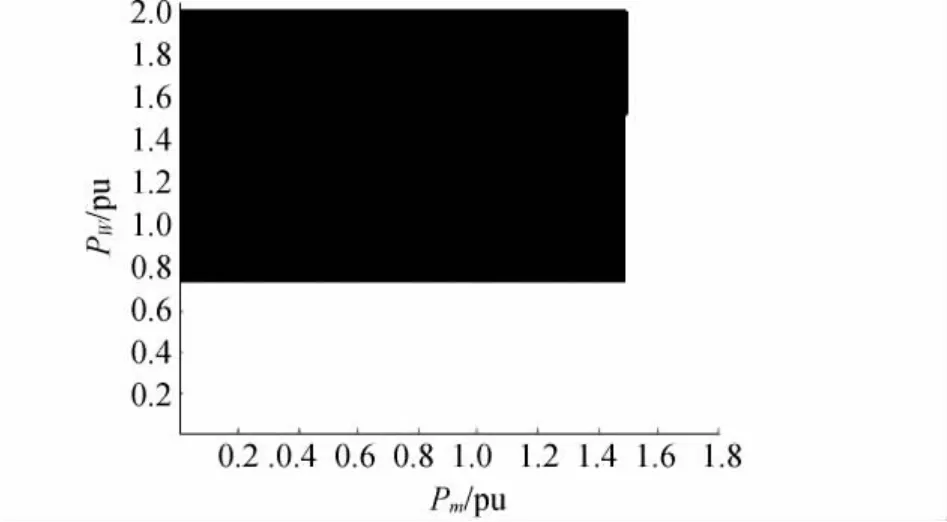
圖2 本文所示系統的小干擾穩定域
從圖2可以看出,陰影部分對應的為系統的小干擾穩定域,異步風力發電機維持在較高出力水平,同步發電機維持在正常出力水平下就可維持系統的小干擾穩定。若不滿足上述條件,則有可能出現系統的振蕩,需要其它輔助措施才能維持系統的小干擾穩定性。
3.2 勵磁放大倍數對小干擾穩定域的影響
勵磁放大倍數作為電力系統的重要參數,對電力系統的穩定性具有一定的影響。因此,在這里通過改變勵磁放大倍數,可以得出對應的小干擾穩定域。通過對比可知放大倍數對小干擾穩定域的影響。Kv=5時的小干擾穩定域如圖3所示,Kv=20時的小干擾穩定域如圖4所示。
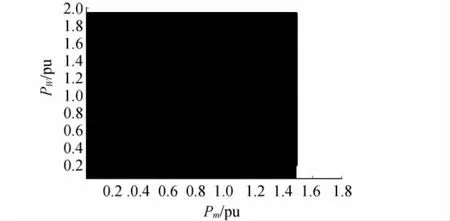
圖3 Kv=5時的小干擾穩定域
圖4 Kv=20時的小干擾穩定域
通過對比圖2、圖3、圖4(其中圖2為勵磁放大倍數為10的穩定域)陰影部分,可以看出勵磁放大倍數對系統的小干擾穩定域有相當大的影響,主要是對異步風力發電機出力影響較大,對同步機出力基本上沒有影響,說明實際系統中合理配置系統的勵磁放大倍數,對系統的穩定性具有至關重要的作用。
4 結論
通過線性穩定性理論研究了含有風機系統的小干擾穩定域問題,得到如下結論:
1)系統的穩定性是由異步風機和同步發電機相互協調決定的,兩者的出力水平需要保持在適當水平才能保證系統的穩定性。
2)勵磁放大倍數對系統的穩定性具有重要的影響。但相對而言,對異步風力發電機的出力影響很大,對同步發電機沒有很大變化。
[1]雷亞洲.與風電并網相關的研究課題[J].電力系統自動化,2003,27(8):84 -89.
[2]張衛紅,于吉慶,王坤.新能源發電并網標準比較[J].黑龍江電力,2011,33(6):403-408.
[3]申洪.變速恒頻風電機組并網運行模型及其應用[D].北京:中國電力科學研究院,2003.
[4]吳義純,丁明,張輝.含風電場的電力系統潮流計算[J].中國電機工程學報,2005,25(4):36-39.
[5]符楊,霍淑珍,邊曉燕,等.基于NEVA的風電并網小干擾穩定研究[J].華東電力,2011,39(3):443-445.
[6]楊濤,鄭濤,遲永寧,等.大規模風電外送對電力系統小干擾穩定性影響[J].中國電力 .2010,43(6):20-25.
[7]關宏亮,遲永寧,戴慧珠,等.異步風電機組接入系統的小干擾穩定及控制[J].電力系統自動化,2008,32(4):54 -58.
[8]范偉,趙書強.考慮風力發電的電力系統小干擾穩定性分析[J].華北電力大學學報,2009,36(2):23 -27,32.
[9]郝正航,陳卓.注入功率空間上電力系統小擾動穩定域的實用邊界[J].電工電能新技術,2011,30(3):38-42.
[10]李桂紅.含風電場電力系統小干擾穩定分析[D].太原:太原理工大學,2010:34-37.
[11]李光琦.電力系統暫態分析[M].北京:中國電力出版社,2007:184-187.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30