SAR的海洋動(dòng)力探測(cè)研究及應(yīng)用淺析
2012-10-03 12:24:48朱敏慧
雷達(dá)學(xué)報(bào) 2012年4期
朱敏慧
(中國(guó)科學(xué)院電子學(xué)研究所 北京 100190)
1 引言
海洋時(shí)刻都在涌動(dòng)著、周而復(fù)始的運(yùn)動(dòng)。對(duì)動(dòng)力激發(fā)諸如風(fēng)、水中航行體和潮汐、洋流等,造成了海表面微小尺度分布的變化,采用空間SAR遙感手段獲取海洋大范圍的變化信息具有明顯優(yōu)勢(shì)。
以電磁波與海表面波浪的相互作用為基礎(chǔ),電磁波散射完全是由海面的小尺度拓?fù)浣Y(jié)構(gòu)(張力波和短重力波)和大尺度海浪的局部坡度決定。海洋動(dòng)力探測(cè)是由于動(dòng)力激發(fā)造成復(fù)雜的海洋現(xiàn)象產(chǎn)生了海表面粗糙度變化,海洋表面的雷達(dá)圖像使我們可以確定那些直接或間接影響海面粗糙度的動(dòng)態(tài)結(jié)構(gòu),包括:內(nèi)波、淺灘上潮夕流、漩渦、洋流、工業(yè)排污、自然和人為海上災(zāi)害、航行中的艦船等。目前海洋遙感學(xué)者致力于將空間 SAR遙感成功地應(yīng)用于海洋觀察,力圖解決以下問題:海洋表面擾動(dòng)參數(shù)的確定(包括:近表面風(fēng)速、波浪的高度和運(yùn)動(dòng)方向等);全球范圍海洋表面狀態(tài)的確定,進(jìn)行氣象探測(cè)和災(zāi)害評(píng)估預(yù)報(bào);內(nèi)波及大尺度海流、洋流邊界的勘測(cè)和預(yù)報(bào);海洋表面污染區(qū)域的狀態(tài)和快速確定;水域的快速控制和監(jiān)視,以發(fā)現(xiàn)行進(jìn)中人工航行體,導(dǎo)航和海難事故監(jiān)控。
本文工作是在近幾年來深入研究海面微波散射特性和 SAR 的海面成像機(jī)理[1]基礎(chǔ)上開展基于SAR 圖像的海洋動(dòng)力探測(cè)的探索和研究。其思路是為對(duì) SAR的海面圖像正確解譯,發(fā)現(xiàn)和挖掘科學(xué)問題,由海洋動(dòng)力學(xué)理論求解科學(xué)問題,以此研究海洋現(xiàn)象/動(dòng)力過程的SAR圖像的理論表達(dá),進(jìn)行統(tǒng)計(jì)和水動(dòng)力分析,認(rèn)識(shí)海洋現(xiàn)象和相應(yīng)規(guī)律,建立和逐步完善預(yù)報(bào)模型,并通過仿真試驗(yàn)和海上試驗(yàn)驗(yàn)證,以此研究和提升SAR系統(tǒng)探測(cè)能力,拓展SAR的海洋觀察應(yīng)用。限于各方面條件約束,本文僅對(duì)內(nèi)波、水下地形波和船只尾跡的基本概念、主要的 SAR成像特征和物理參數(shù)反演等作一簡(jiǎn)要闡述。
2 內(nèi)波探測(cè)研究
海洋隨機(jī)多變,在眾多復(fù)雜的海洋現(xiàn)象中,內(nèi)波是一種中尺度自然現(xiàn)象,在其生成、傳播、衰亡過程中其動(dòng)力過程對(duì)海洋現(xiàn)象有著重要影響。特別是我國(guó)東南沿海和南海,內(nèi)波活動(dòng)更是頻繁出現(xiàn)。對(duì)內(nèi)波形成機(jī)制和時(shí)空分布的研究顯得尤為重要,國(guó)內(nèi)外學(xué)者往往把我國(guó)南海的呂宋海峽區(qū)域作為研究?jī)?nèi)波的典型案例。
大幅度內(nèi)波在傳播過程中產(chǎn)生的擾動(dòng)可導(dǎo)致海水強(qiáng)烈幅聚和突發(fā)性的強(qiáng)流,它們的剪切效益有可能對(duì)海洋工程、石油鉆井平臺(tái)和海底石油管道造成嚴(yán)重危險(xiǎn)。在1990年夏的東沙島附近,當(dāng)內(nèi)孤立波經(jīng)過時(shí),石油鉆井機(jī)難以操作,瞄定的油罐箱在不到 5 min內(nèi)擺了110°[2];安德曼海的一個(gè)石油鉆井機(jī)曾遭內(nèi)波襲擊被推移了90°,挪動(dòng)了30.48 m[3]。因此海洋工程設(shè)計(jì)和實(shí)施時(shí)必須考慮內(nèi)波的影響。
大振幅的內(nèi)波也可能對(duì)水下潛艇航行時(shí)造成災(zāi)難性后果。人們一直懷疑1969年美國(guó)“長(zhǎng)尾鯊”號(hào)核潛艇的失事可能由于振幅為100 m的內(nèi)孤立波使其迅速下沉到超過可承受深度造成的[4]。
內(nèi)波會(huì)改變聲信號(hào)在海水中傳播路線,直接影響水聲信道,內(nèi)波產(chǎn)生的強(qiáng)烈流場(chǎng)會(huì)影響水下武器的發(fā)射以及水下聲吶的通訊和探測(cè)。
內(nèi)波在陸架區(qū)的破碎引起海水的垂直混合,將底層富含營(yíng)養(yǎng)鹽的海水帶到表層,給浮游動(dòng)植物提供營(yíng)養(yǎng),這給海洋漁業(yè)起到積極作用。此外內(nèi)波中存在的非線性現(xiàn)象也是一個(gè)良好的非線性理論研究對(duì)象。因此對(duì)內(nèi)波的探測(cè)在保護(hù)、開發(fā)和利用海洋資源方面、海洋工程和軍事安全等方面都具有非常重要的應(yīng)用價(jià)值。
2.1 海洋內(nèi)波探測(cè)現(xiàn)有物理基礎(chǔ)
內(nèi)波發(fā)生的機(jī)制復(fù)雜,海域?qū)踊Y(jié)構(gòu)、海底地形地貌以及擾動(dòng)源的激勵(lì)是產(chǎn)生內(nèi)波的必要條件。它的能量巨大,出現(xiàn)區(qū)域相對(duì)固定,且最大振幅出現(xiàn)在海面以下,幾乎不引起表面高度的變化。
大量的實(shí)驗(yàn)和理論研究表明,SAR對(duì)海洋內(nèi)波的成像主要通過以下3個(gè)物理過程[5,6]:內(nèi)波傳播引起海表層流場(chǎng)發(fā)生輻聚或輻散效應(yīng);變化的表層流與風(fēng)致海表面微尺度波之間的相互作用,該過程改變了海面粗糙度;海面微尺度波與雷達(dá)波之間的相互作用,該過程決定了海面雷達(dá)后向散射特性變化。
以上成像機(jī)理是構(gòu)成 SAR海洋內(nèi)波探測(cè)的現(xiàn)有物理基礎(chǔ)(如圖1所示)。
通常 SAR海洋內(nèi)波遙感模擬模型由非線性自由長(zhǎng)內(nèi)波的KdV方程、作用量譜平衡方程和布拉格散射模型發(fā)展由來,它們分別描述SAR的海洋內(nèi)波成像的3個(gè)物理過程。
2.1.1 KdV 方程 非線性自由長(zhǎng)內(nèi)波在水平方向(x方向)的傳播過程可以用KdV方程描述[7-9],其表達(dá)式為

圖1 內(nèi)波、表面波與SAR成像關(guān)系的示意圖
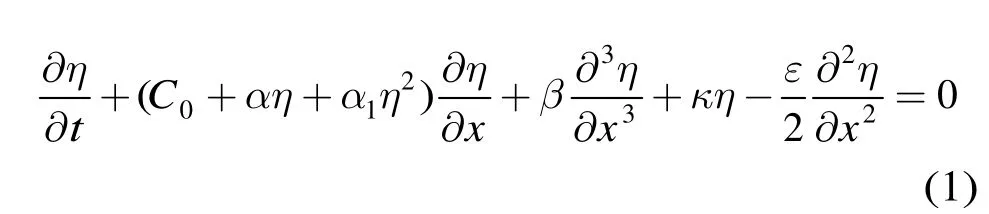
其中,η為內(nèi)波縱向位移,t為時(shí)間,參數(shù)0,,1,,C α α β κ和ε分別為線性項(xiàng)(即線性波波速)、一階非線性項(xiàng)、二階非線性項(xiàng)、彌散項(xiàng)、淺水項(xiàng)和耗散項(xiàng)的系數(shù)。
內(nèi)波的垂向(z方向)結(jié)構(gòu)近似由無(wú)量綱結(jié)構(gòu)函數(shù)Z(z)確定,在(1)不考慮平均流、(2)不考慮地球自轉(zhuǎn)和(3)Boussinesq近似條件下,Z(z)滿足本征值方程[10]
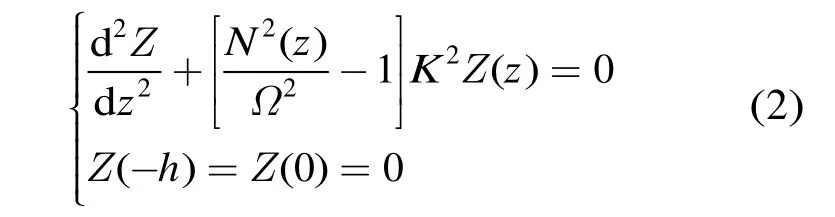
其中Ω為內(nèi)波角頻率,K為內(nèi)波波數(shù),h為海水深度,N(z)為Brunt-V?is?l?頻率
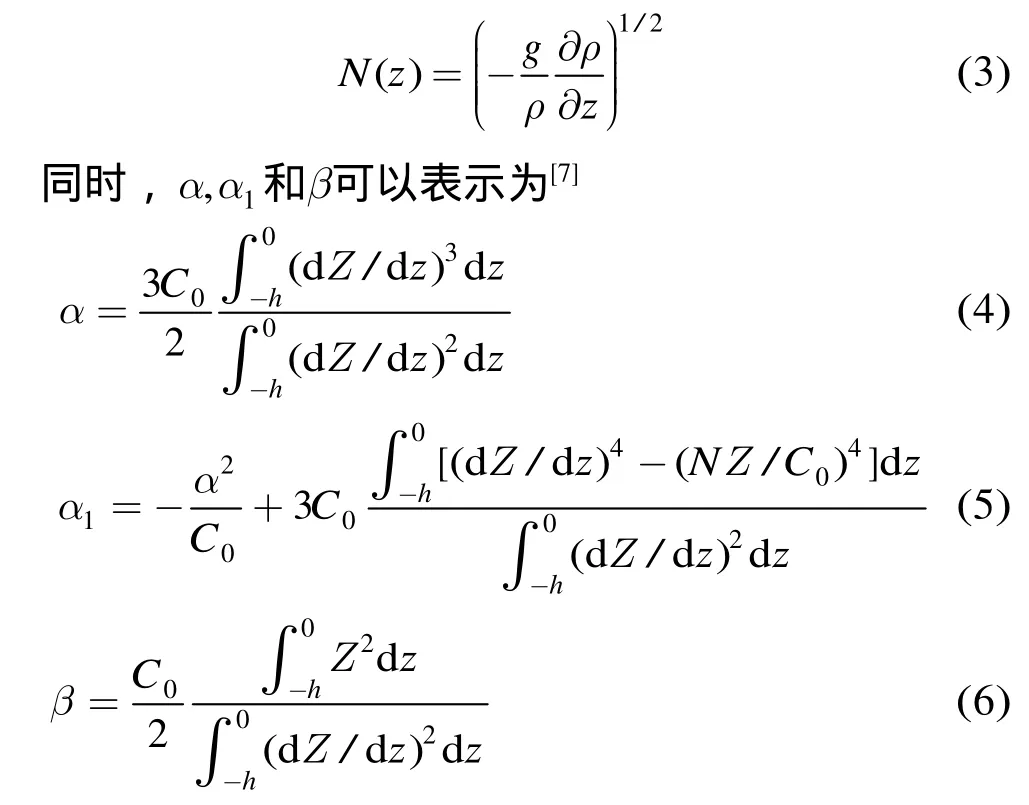
由于海水密度在密度躍層附近很小的范圍(Δh)內(nèi)變化很大,而在其它深度變化很小,因此Brunt-V?is?l?頻率在躍層附近有一個(gè)極大值,而在躍層以外其值很小。于是,可以假定海洋由二層理想水體構(gòu)成,一個(gè)在躍層以上,一個(gè)在躍層以下。對(duì)于混合層(上層)深度為h1,底層(下層)深度為h2的二層海洋系統(tǒng),式(4)-式(6)可簡(jiǎn)化為[8]
其中,Δρ=ρ2?ρ1為下層與上層海水密度之差,ρ為海水平均密度,線性波波速C0可由最低型內(nèi)波的彌散關(guān)系得到
由式(7)可知,h1=h2時(shí),α=0,此時(shí)一階非線性項(xiàng)消失,二階非線性項(xiàng)才需要加以考慮,一般情況下,該項(xiàng)可以忽略不計(jì)。由于淺水效應(yīng)項(xiàng)的系數(shù)κ 很小,大約為?2×10?5s?1,因而該項(xiàng)也可以忽略[8]。
求解式(1),可得到以下穩(wěn)定態(tài)孤立波解:

其中η0為內(nèi)波最大振幅,內(nèi)波相速度Cp和內(nèi)波半振幅寬度l(此時(shí) η=±0 .42η0)分別為
由式(7)可知,當(dāng) h1<h2時(shí),α <0,式(11)取負(fù)號(hào),此時(shí)的內(nèi)波稱為下降型內(nèi)波;當(dāng) h1>h2時(shí),α> 0,式(11)取正號(hào),此時(shí)的內(nèi)波稱為上升型內(nèi)波。
于是,內(nèi)波傳播引起的表層流在x方向上的流速可用下式表示[11]

其中,對(duì)于下降型內(nèi)波和上升型內(nèi)波,式(14)分別取正、負(fù)號(hào)。
2.1.2 作用量譜平衡方程 一般來說,SAR 圖像上可觀測(cè)到的內(nèi)波,其波長(zhǎng)大于幾百米[12]。它們引起的表層流變化的時(shí)空尺度遠(yuǎn)大于海表面微尺度波的時(shí)空尺度,因此,表層流對(duì)海表面微尺度波的調(diào)制作用可用 Wentzel-Kramers-Brillouin弱相互作用理論來描述。根據(jù)這個(gè)理論,緩慢變化流場(chǎng)中的微尺度波能譜密度的變化滿足以下作用量譜平衡方程[13,14]

其中A(r,k,t)=Ψ(r,k,t)/ω′為作用量譜,r=(x,y)為空間變量,k為微尺度波波數(shù),S(r,k,t)為源函數(shù),Ψ(r,k,t)為能譜密度,ω′為微尺度波的固有頻率,滿足以下關(guān)系:

為方便起見,在4維相空間中求解式(15)。在4維相空間中,Bragg波沿以下射線方程確定的軌跡傳播,

其中ω(r,k,t)=ω′(k)+ k? U(r,t)為觀測(cè)頻率或表視頻率,U(r,t)為表層流速。
由于緩慢變化的表層流場(chǎng)可看作定常項(xiàng)U0與含時(shí)微擾項(xiàng)δU(r,t)之和,它所導(dǎo)致的作用量譜的變化也可看作是定常項(xiàng)A0(k)與含時(shí)微擾項(xiàng) δA(r,k,t)之和,即

同時(shí),微擾源函數(shù)S可近似表示為[5]

其中μ稱為張弛率或波成長(zhǎng)率,其倒數(shù)τr具有時(shí)間的量綱,也叫做張弛時(shí)間,它表征作用量譜受到微擾后回到其平衡點(diǎn)所需時(shí)間。
將式(18)-式(21)代入式(15)中,求解并只保留一階項(xiàng),可得

其中cg=? ω′/?k 為微尺度波的群速度,A0(k)為其平衡作用量譜。
2.1.3 布拉格散射模型 由于SAR入射角θ為20°-70°,海面對(duì)雷達(dá)波的后向散射以Bragg散射為主,此時(shí),正比波數(shù) σ0為 ±2 kRsinθ 的 Bragg波的能譜密度Ψ之和,即

其中kR為雷達(dá)波數(shù),M為散射系數(shù),可由Bragg散射理論計(jì)算得到。假設(shè)Ψ為Phillips平衡譜形式,即Ψ ∝ k?4。由式(22)和式(23),以及作用量譜與能譜密度的關(guān)系A(chǔ)=Ψ/ω′,可得到[13]

其中Δσ0=為內(nèi)波海面的雷達(dá)后向散射截面 σ0與背景海面的雷達(dá)后向散射截面之差,雷達(dá)視向在水平方向的投影為n方向,γ為Bragg 波群速度與相速度之比,即

將式(16)代入,可得

由上式可知,對(duì)于重力波,γ=1/2;對(duì)于表面張力波,γ=3/2。
設(shè)內(nèi)波傳播方向(x方向)與雷達(dá)視向的夾角為φ,如圖2所示,則式(24)可表示為

將式(14)代入式(27),得到
其中x ′=x?Ct 為隨內(nèi)波一起運(yùn)動(dòng)的坐標(biāo)系,正、負(fù)號(hào)分別對(duì)應(yīng)于下降型內(nèi)波和上升型內(nèi)波。對(duì)于由海面風(fēng)產(chǎn)生的海表面微尺度波而言,其波向與風(fēng)向基本一致。因此,式(28)中的張弛率可表示為[13]
式(28)是由 KdV方程、作用量譜平衡方程和Bragg散射模型導(dǎo)出的SAR內(nèi)波遙感模擬計(jì)算模式。
2.2 我國(guó)沿海內(nèi)波時(shí)空分布
歷史上,我國(guó)內(nèi)波現(xiàn)場(chǎng)觀測(cè)資料貧乏。自歐空局“ERS-1/2”,“EVISAT”,加拿大“RADARSAT-1/2”等等星載SAR以及機(jī)載SAR投入業(yè)務(wù)化運(yùn)行后,在我國(guó)的南海、東海和黃海都觀測(cè)到內(nèi)波,引起美國(guó)、俄羅斯和歐洲的內(nèi)波動(dòng)力學(xué)專家和海洋遙感專家以及海軍的高度關(guān)注。美國(guó)海軍研究署科學(xué)顧問Apel稱中國(guó)南海北部海域是研究非線性內(nèi)波的天然實(shí)驗(yàn)室。
作者所在課題組結(jié)合SAR內(nèi)波成像機(jī)理研究,對(duì)中國(guó)海內(nèi)波的時(shí)空分布作了統(tǒng)計(jì)分析,收集了1994年至2004年的389幅圖內(nèi)波SAR衛(wèi)星圖像數(shù)據(jù),圖2展示了覆蓋十年衛(wèi)星圖像的中國(guó)海內(nèi)波分布圖。
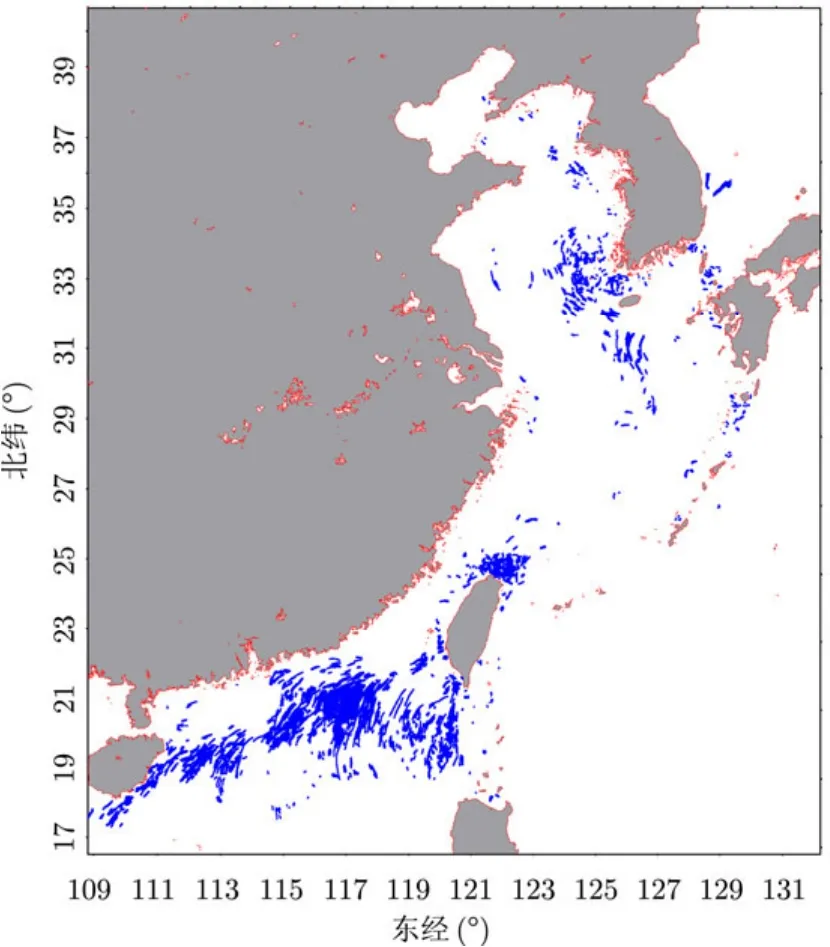
圖2 十年尺度衛(wèi)星圖像中國(guó)海內(nèi)波分布
圖3分別表示對(duì)黃海、東海、臺(tái)灣、東沙島海域和海南島海域統(tǒng)計(jì)全年衛(wèi)星圖像的內(nèi)波出現(xiàn)概率分布,內(nèi)波出現(xiàn)了季節(jié)性變化。由于海水密度的有效層結(jié)常年存在,只是隨著季節(jié)的不同,層結(jié)的結(jié)構(gòu)和深度有相應(yīng)的變化。夏季海洋表面由于吸收了太陽(yáng)輻射的熱量,密度降低,溫度要高于海洋下層,內(nèi)波出現(xiàn)主要集中在夏季,占有70%;冬季發(fā)生很少,春季和秋季為過渡周期,分別出現(xiàn)18%和11%;在冬季期間,因?yàn)楹1砻鏌崃看罅可⒑模瑢踊Y(jié)構(gòu)下移,密度躍變率減小,會(huì)造成內(nèi)波出現(xiàn)概率減小。
2.3 海表面風(fēng)是影響內(nèi)波成像的一個(gè)重要因素
內(nèi)波的波長(zhǎng)、波高、波動(dòng)周期和能量都分布在很寬范圍內(nèi),根據(jù)中歐對(duì)地觀察合作的龍計(jì)劃基于SAR遙感的我國(guó)沿海內(nèi)波觀察研究項(xiàng)目[14]報(bào)告,對(duì)南海北部海域作了分析研究,內(nèi)波傳播速度在 0.3 m/s到 3.0 m/s范圍,內(nèi)波幅度在2 m到170 m范圍內(nèi)。同時(shí)又收集了2000年至2007年間平均風(fēng)速資料,圖4和圖5所示可以說明從4月到9月平均風(fēng)速在6.5 m/s左右,10月到次年3月平均風(fēng)速在9.5 m/s,由此可以看到內(nèi)波被觀察到的可能性的季節(jié)性原因還同風(fēng)速有很強(qiáng)的關(guān)聯(lián)。在高的風(fēng)速條件下,由于SAR的信噪比低,內(nèi)波信號(hào)太弱,這也是冬季難以被觀察到的一個(gè)原因。
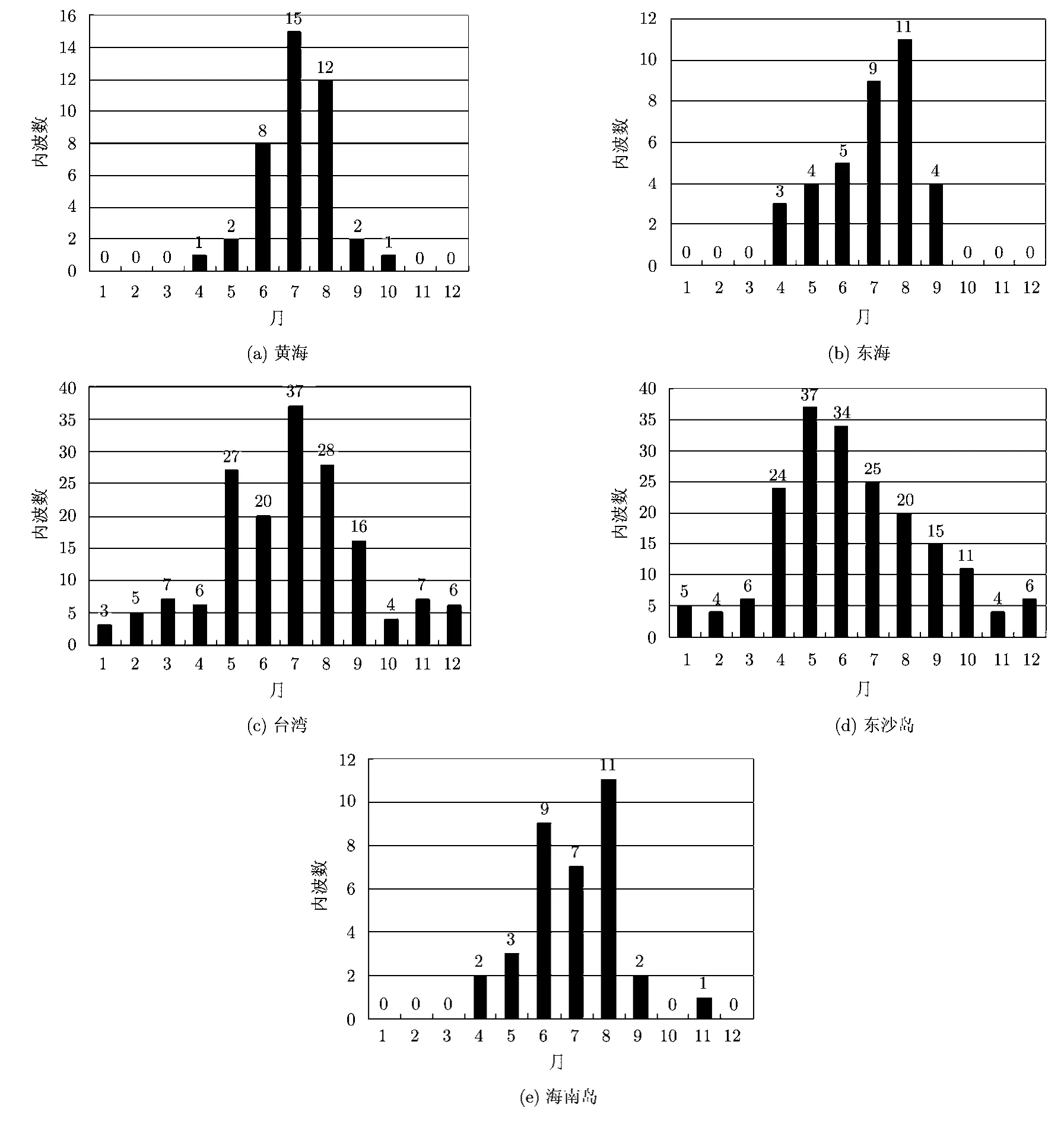
圖3 我國(guó)黃海、東海、臺(tái)灣、東沙島海域和海南島海域內(nèi)波按月份時(shí)空分布
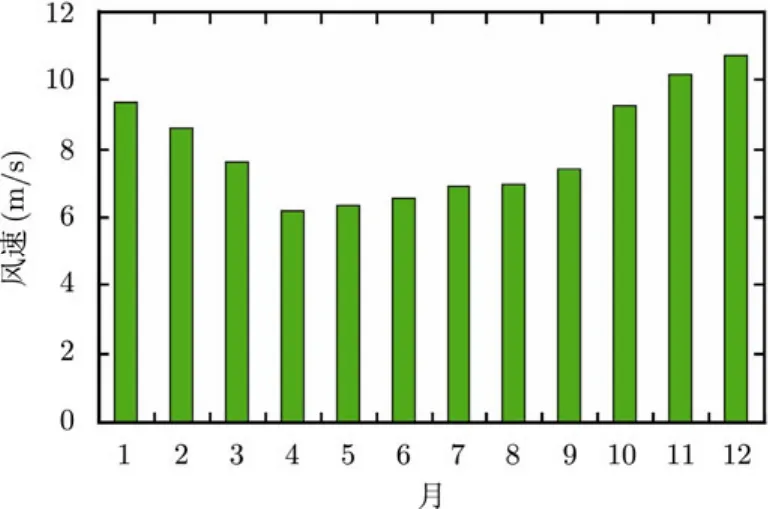
圖4 南海北部海域按月份平均風(fēng)速分布
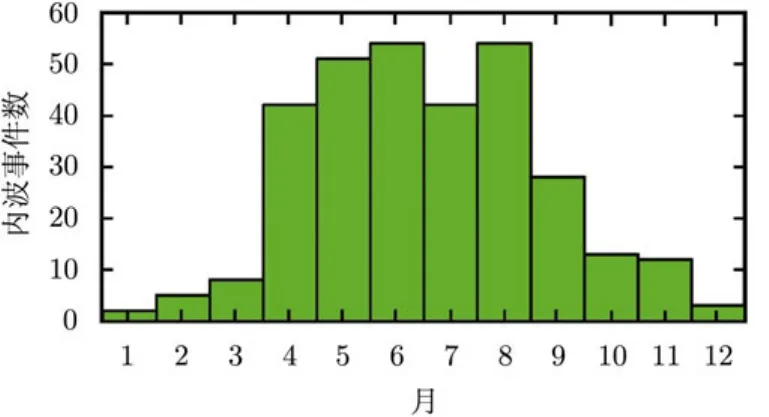
圖5 南海北部海域按月份出現(xiàn)內(nèi)波事件情況
2.4 內(nèi)波參數(shù)估計(jì)
作者所在的課題組在“十五”期間開展了大規(guī)模海上試驗(yàn),利用電子所研制的機(jī)載SAR獲取了很多寶貴試驗(yàn)數(shù)據(jù),特別是獲取了難得可貴的時(shí)間序列的內(nèi)波圖像,促進(jìn)了內(nèi)波成像特性和傳播特性的研究,對(duì)有關(guān)SAR圖像內(nèi)波探測(cè)研究[16]作了詳細(xì)闡述:
(1) 開展內(nèi)波SAR成像機(jī)理研究,研究激勵(lì)機(jī)制和傳播特性,研究海洋環(huán)境參數(shù)、雷達(dá)參數(shù)對(duì)SAR成像的影響;
(2) 開展內(nèi)波參數(shù)反演研究,從SAR圖像中提取內(nèi)波波長(zhǎng)、波向、相速度和振幅等參數(shù)。
圖6 是1998年6月12日ERS-2一幅我國(guó)南海區(qū)域 SAR圖像,展示了亮暗條帶分別代表內(nèi)波的波峰和波谷。由式(28),式(29),內(nèi)波的波長(zhǎng)、傳播速度、傳播方向、位置和成像時(shí)間都能夠從SAR圖像中估算出來。圖7 給出它的內(nèi)波在傳播方向的強(qiáng)度表達(dá)。
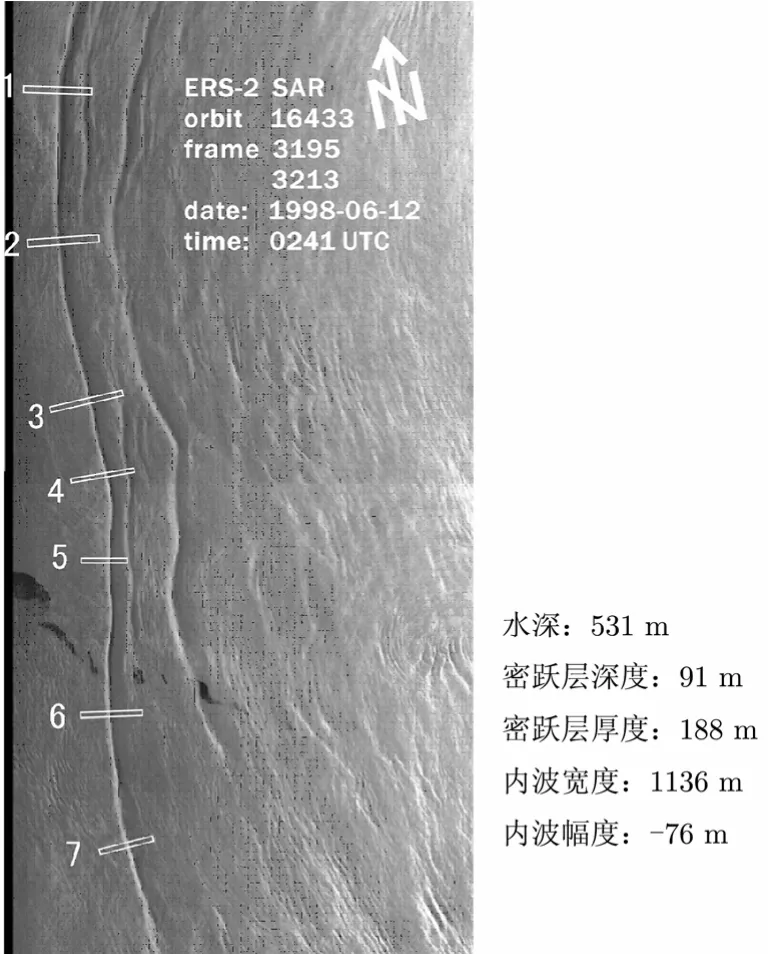
圖6 典型內(nèi)波SAR圖像
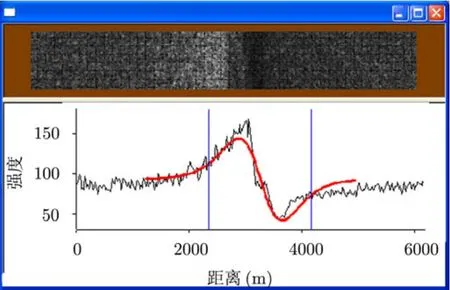
圖7 單包內(nèi)波傳播方向強(qiáng)度
3 水下地形探測(cè)研究
水下地形和水深是海洋環(huán)境一個(gè)重要要素。水下地形的探測(cè)對(duì)于海上油氣勘探和開采、海上交通運(yùn)輸和海洋捕撈、海底管道與光纜鋪設(shè)、經(jīng)濟(jì)和軍事活動(dòng)等都有著重要意義。自美國(guó)Seasat入軌以來,許多國(guó)家都相繼開展了星載 SAR水下地形探測(cè)研究,其中有Alpers和Hennings提出了SAR水下地形探測(cè)理論模型和應(yīng)用解譯。由于海洋中有許多不確定復(fù)雜因素,事實(shí)上,難以用一個(gè)完善模型來精確描述海面現(xiàn)象的雷達(dá)后向散射過程。目前得到公認(rèn)的是流經(jīng)水下地形的潮流對(duì)海表面微尺度波的動(dòng)力調(diào)制是SAR水下地形成像機(jī)理,主要通過以下3個(gè)物理過程:
(1) 潮流與水下地形之間相互作用,引起海表層流場(chǎng)發(fā)生輻聚或輻散效應(yīng);
(2) 變化的表層流與風(fēng)致海表面微尺度波之間的相互作用,該過程改變了海面粗糙度;
(3) 海面微尺度波與雷達(dá)電磁波之間的相互作用,該過程決定了海面雷達(dá)后向散射特性變化。
以上成像機(jī)理是構(gòu)成 SAR淺海水下地形探測(cè)的現(xiàn)有物理基礎(chǔ)。將雷達(dá)后向散射截面與水下地形通過大尺度波流相互作用聯(lián)系起來構(gòu)成仿真模型不在此贅述。
如圖8所示,海底地形改變了海洋中流場(chǎng)分布,會(huì)間接地對(duì)海面粗糙度產(chǎn)生影響,從而在SAR圖像上顯示亮暗間隔灰度不同的圖像。南海呂宋海峽區(qū)域內(nèi)波在不同季節(jié)各異形態(tài)同時(shí)也是它的水下地貌特征造成的最佳說明。
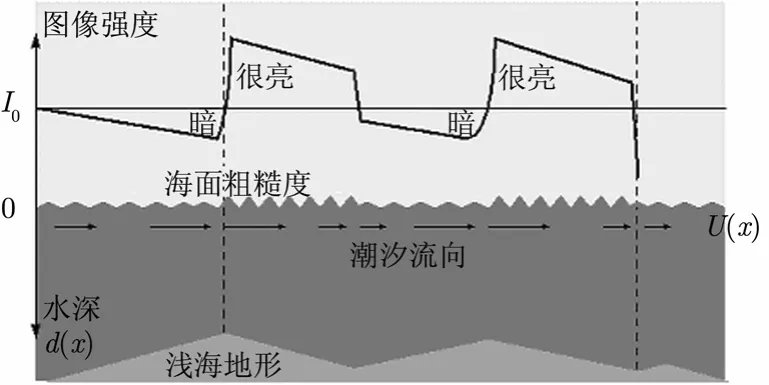
圖8 海底地形映射在圖像上強(qiáng)度分布
下面是Zheng Quanan提供的一個(gè)案例[17],圖9為1995年6月3日ERS-1的臺(tái)灣海峽南部淺灘圖像,成像時(shí)淺灘潮流流向由西南向東北為45°,流速為 0.7 m/s,海面風(fēng)向與潮流流向一致,風(fēng)速 2.3 m/s。
圖10給出了反演結(jié)果,可以看到淺灘高低不等,地形復(fù)雜,散布著數(shù)以百計(jì)的沙波,沙波寬度和長(zhǎng)度各異,水深最淺不到20 m,深處也有100 m。
4 水面艦的探測(cè)研究
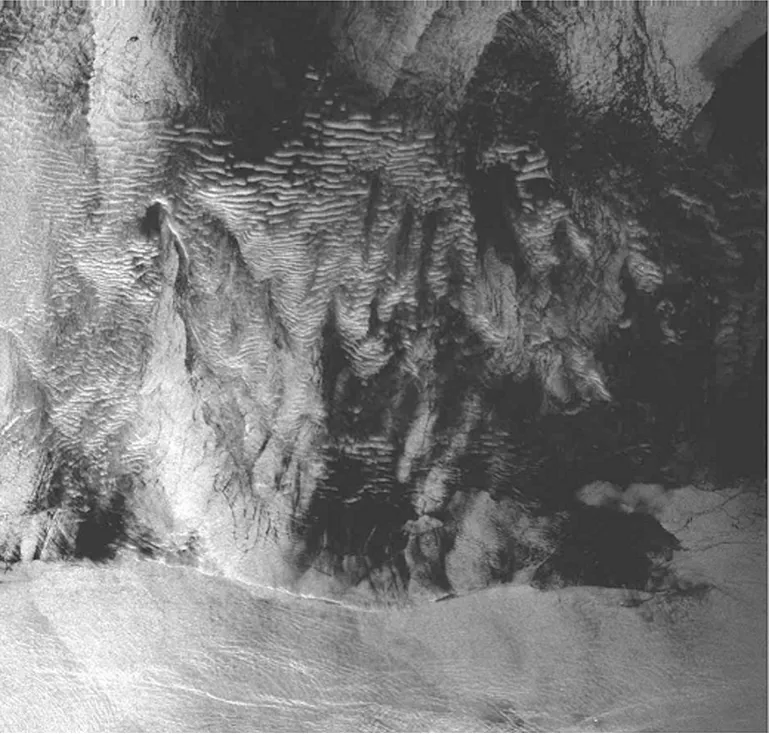
圖9 臺(tái)灣淺灘SAR圖像
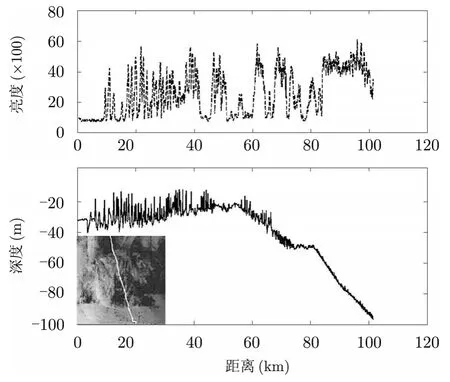
圖10 臺(tái)灣淺灘水深反演示例
水面船只航行會(huì)引起開爾文波、湍流、波浪破碎等水動(dòng)力擾動(dòng),在海水密躍層較淺的情況下還會(huì)引起內(nèi)波現(xiàn)象。水面艦尾跡分布范圍廣、持續(xù)時(shí)間長(zhǎng),含有豐富的目標(biāo)幾何特征和運(yùn)動(dòng)參數(shù)信息。由于尾跡的水面表征包含水面艦的主要運(yùn)動(dòng)狀態(tài)(包括勻速、變速、變向運(yùn)動(dòng))、擾動(dòng)類型(體積效應(yīng),推進(jìn)器效應(yīng)等),主要航速范圍和參數(shù)范圍,以及包含主要的海洋環(huán)境條件(包括風(fēng)速和背景波浪場(chǎng))信息,因此研究SAR系統(tǒng)對(duì)海洋觀察應(yīng)用,從SAR圖像中提取尾跡信息是對(duì)行進(jìn)中的人工航行體的檢測(cè)和識(shí)別的最好選擇。
4.1 水面艦尾跡的類型
水面艦的尾跡是典型分布目標(biāo),航行中對(duì)周圍水介質(zhì)的擾動(dòng)表現(xiàn)為多種形式,如:船體行進(jìn)引起海水的分流和并流、推進(jìn)系統(tǒng)對(duì)水的噴射和拍打、引起內(nèi)波振蕩和聲波等。艦船尾跡的特征取決于船體類型及其運(yùn)動(dòng)參數(shù)和海洋環(huán)境物理要素。在不同的條件下,運(yùn)動(dòng)船只的尾跡特征有多種表現(xiàn)形式,可以分為3大類:(1) 船產(chǎn)生的表面波;(2) 湍流或渦流尾跡;(3) 船產(chǎn)生的內(nèi)波。光學(xué)和SAR遙感手段都能觀察到。但唯有船產(chǎn)生的表面波中另一種子范疇即短波,直接被 SAR通過布拉格散射成像看見,這是 SAR固有的特征,有別于光學(xué)圖像,在SAR圖像中表現(xiàn)為窄V尾跡。艦船尾跡主要分類及特征在表1中作了簡(jiǎn)要?dú)w納。
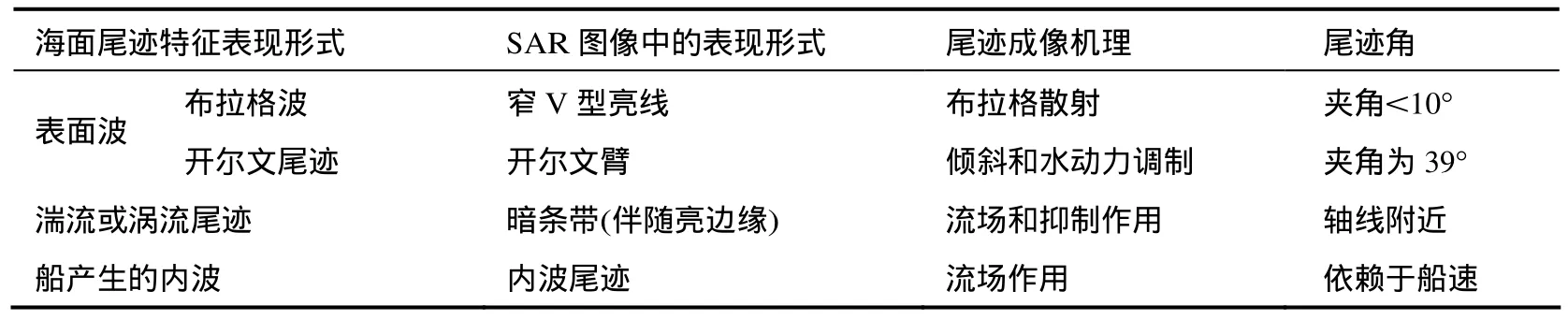
表1 艦船尾跡分類及特征
4.2 尾跡的成像特征
海浪是尾跡賴以存在的背景,通常艦船尾跡散射系數(shù)的反差在 SAR圖像上表現(xiàn)明顯,為了研究SAR圖像上對(duì)艦船運(yùn)動(dòng)狀態(tài)判斷和參數(shù)提取方法,有必要從尾跡形成機(jī)理出發(fā),深入分析尾跡在SAR圖像上表現(xiàn)特征,以獲取影響這些特征的各類要素的定量關(guān)系,下面僅僅是概要描述各類尾跡主要特點(diǎn)。
4.2.1 開爾文尾跡 開爾文尾跡波屬于長(zhǎng)重力波,是水中運(yùn)動(dòng)體常見的一種“V”型尾跡,“V”的二臂呈“胡須”狀,構(gòu)成分歧波,夾角為恒定的39°,尖頭波具有最大的幅度,位于尾跡角19.5°的兩條線頭部。開爾文尾跡的表面起伏最大的區(qū)域位于船跡兩側(cè)尾跡角 16°≤β≤19.5°內(nèi),如圖 11。在風(fēng)速介于 3 m/s和10 m/s可被SAR發(fā)現(xiàn),如圖12所示。
從SAR圖像上艦船速度反演,當(dāng)船速Us沿?x傳播方向航行,產(chǎn)生的“自由”表面波沿著與x軸夾角為φ的不同角度傳播,尾跡波高可描述為這些平面波的疊加[18]:
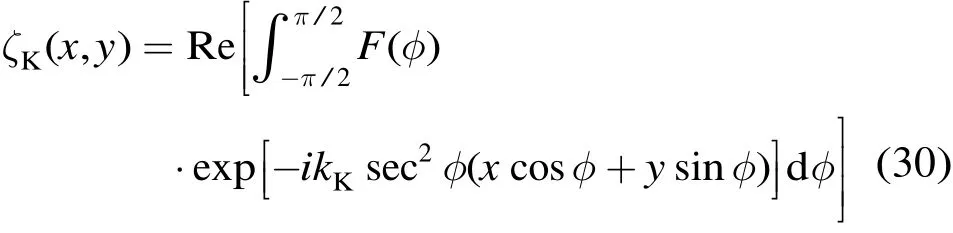
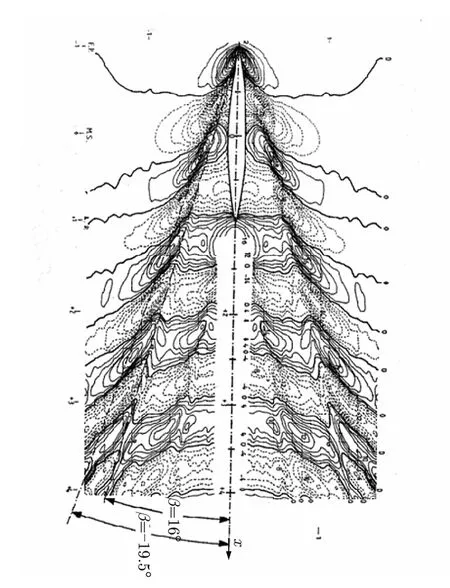
圖11 開爾文尾跡分布
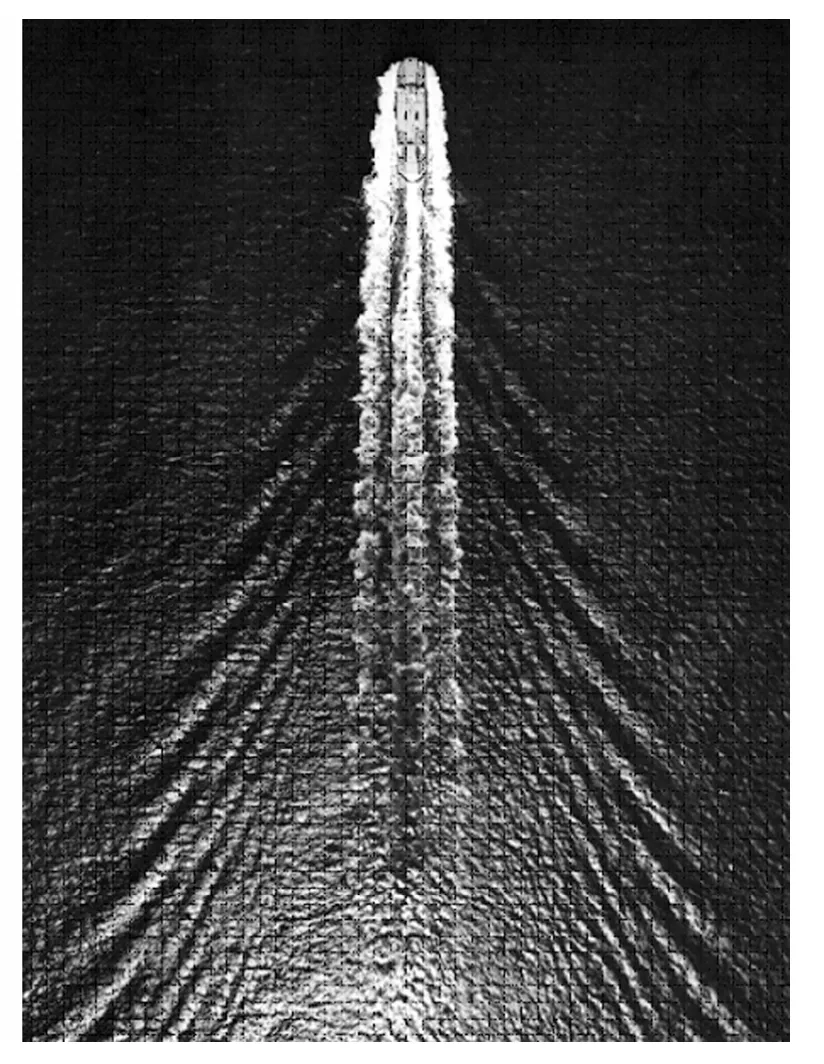
圖12 開爾文尾跡SAR圖像
其中,kK(φ)[ x cos φ+y sin φ]是相位函數(shù),kK(φ)=kK?sec2φ是沿著與 x軸夾角φ傳播的波分量的波數(shù),Re[ ]表示取實(shí)部,F(xiàn)(φ)是復(fù)數(shù)值,表示船的特征參數(shù)。
尾跡的相速度和波長(zhǎng)為
可以看到開爾文尾跡波高與船體結(jié)構(gòu)、排水量和吃水深度有關(guān),尾跡波波長(zhǎng)與船速度成正比。
4.2.2 湍流尾跡 湍流尾跡是由船體和推進(jìn)器對(duì)船后周圍水體擾動(dòng)產(chǎn)生短波的會(huì)聚和發(fā)散造成的,船后十分龐大的圓錐水體在海面上的映波,時(shí)間持久范圍廣大。圖13為湍流尾跡生成示意圖,湍流抑制了海面表面波的高頻分量,減少了雷達(dá)后向散射,在SAR圖像上顯示長(zhǎng)長(zhǎng)的暗條,有時(shí)會(huì)延伸幾十公里,在風(fēng)速介于3 m/s和10 m/s之間時(shí)可被SAR發(fā)現(xiàn),圖14所示,有時(shí)伴隨的亮臂可能是船體推進(jìn)器造成的渦流引起的。
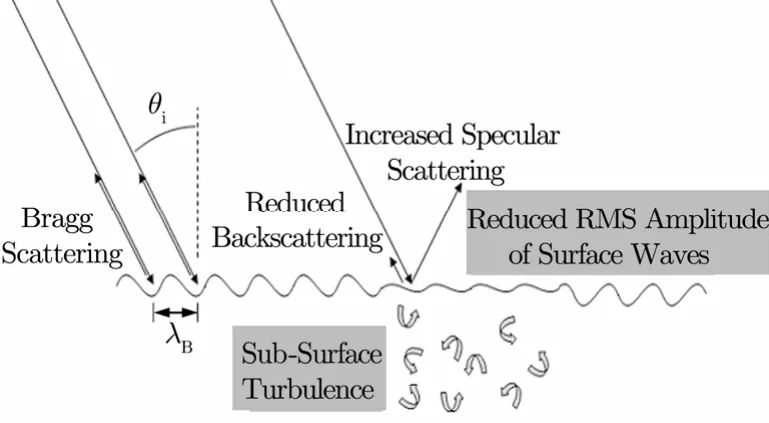
圖13 湍流尾跡生成示意圖
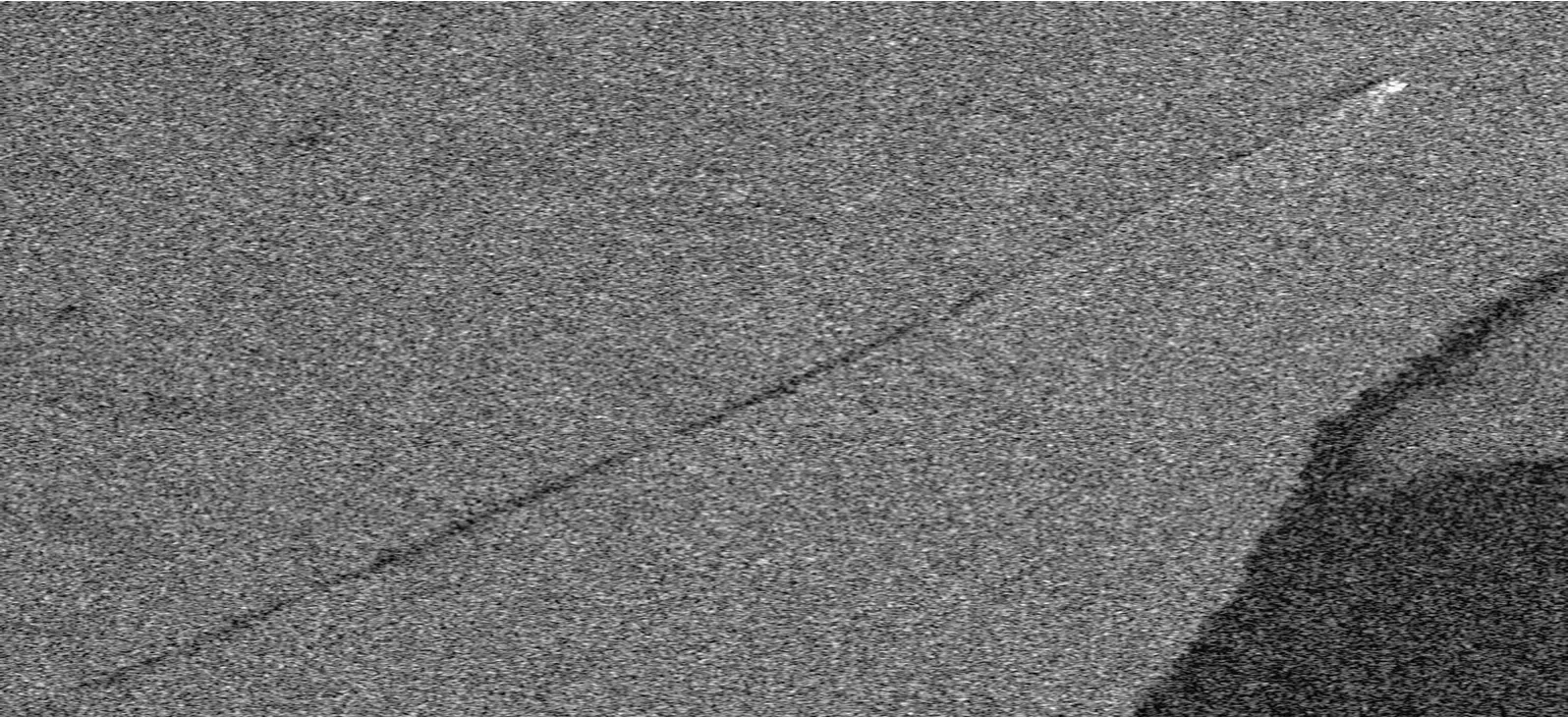
圖14 湍流尾跡SAR圖像
然而當(dāng)船體具有沿著雷達(dá)照射方向的速度分量時(shí),湍流尾跡是較穩(wěn)定的,幾乎不會(huì)在SAR圖像中偏移,所以相對(duì)于雷達(dá)具有徑向速度分量運(yùn)動(dòng)的艦船似乎離開了其尾流。如果船的速度分量指向雷達(dá),則船只看上去在雷達(dá)運(yùn)動(dòng)的方向上發(fā)生了移動(dòng)。因此根據(jù)船的強(qiáng)反射點(diǎn)偏移湍流尾跡軸線的距離可以反演出船速。
4.2.3 窄V尾跡 窄V尾跡主要是船體擾動(dòng)引起的短布拉格共振紋波所致。隨著船向前航行,會(huì)在每個(gè)點(diǎn)都輻射出一列環(huán)形波,其幾何描述如圖15。
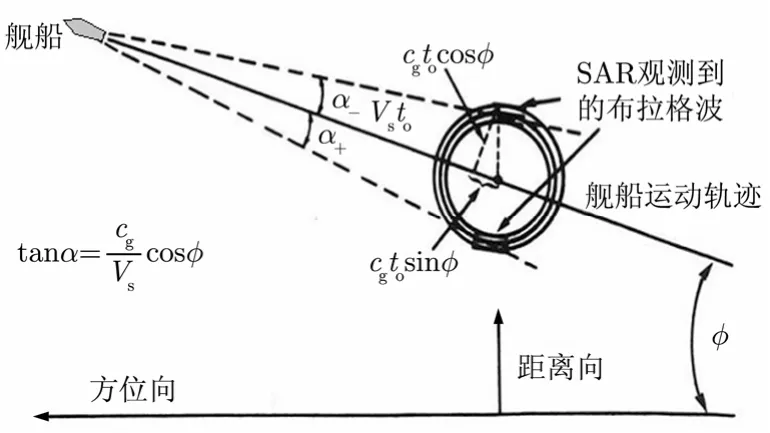
圖15 窄V型尾跡波模式圖
每個(gè)散射中心的波以它們的群速度沿著輻射線向外傳播,因此雷達(dá)可以在相對(duì)于船的航行軸的任何視線角檢測(cè)到這種短波,由于長(zhǎng)波比短波傳播的速度快,因此處于長(zhǎng)波和短波之間某一位置的波長(zhǎng)為λB的波會(huì)與雷達(dá)信號(hào)發(fā)生布拉格共振,共振點(diǎn)沿著雷達(dá)照射方向分布于環(huán)形兩側(cè),隨著離船距離的不同,這些共振點(diǎn)沿著兩條直線分布,直線夾角與船的速度、雷達(dá)頻率、雷達(dá)入射角和雷達(dá)與船的相對(duì)方向等因素有關(guān)。

尾跡角決定于短波群速度與船速的比,即其中cg是布拉格波的群速度。它要求海面平靜,在風(fēng)速小于3 m/s時(shí)可被SAR發(fā)現(xiàn),如圖16所示,因此一般不多見。
4.2.4 內(nèi)波尾跡 內(nèi)波尾跡與海水層化結(jié)構(gòu)有關(guān),其主要特征是表面流場(chǎng)速度大,而波幅很小。當(dāng)有強(qiáng)的淺的密度躍層存在時(shí),水面艦船船體的位移或船體產(chǎn)生的渦流會(huì)產(chǎn)生內(nèi)波尾跡。內(nèi)波尾跡引起的表面粗糙度特征為一對(duì)對(duì)相鄰的非常粗糙和光滑條紋,在相應(yīng)的雷達(dá)圖像均勻背景上出現(xiàn)一對(duì)對(duì)相鄰的明暗條帶,尾跡很長(zhǎng),如圖17所示。在每個(gè)水平面內(nèi)的內(nèi)波尾跡具有相同形狀,但幅度隨著深度變化。
當(dāng)水深一定時(shí),隨著密度躍層的深度不同,所得到的內(nèi)波尾跡的強(qiáng)度和夾角也有所不同,按照線性理論,內(nèi)波的傳播速度為

則內(nèi)波尾跡夾角β與艦船速度Us之間的關(guān)系為

從上所知,深入研究航行中的艦船尾跡生成機(jī)理、尾跡與海洋背景相互作用、雷達(dá)發(fā)射的電磁波對(duì)海表面波流調(diào)制的3個(gè)主要物理過程,是完整理解和解譯艦船尾跡的SAR圖像特征,建立對(duì)艦船尾跡檢測(cè)和識(shí)別的依據(jù)。
5 結(jié)束語(yǔ)
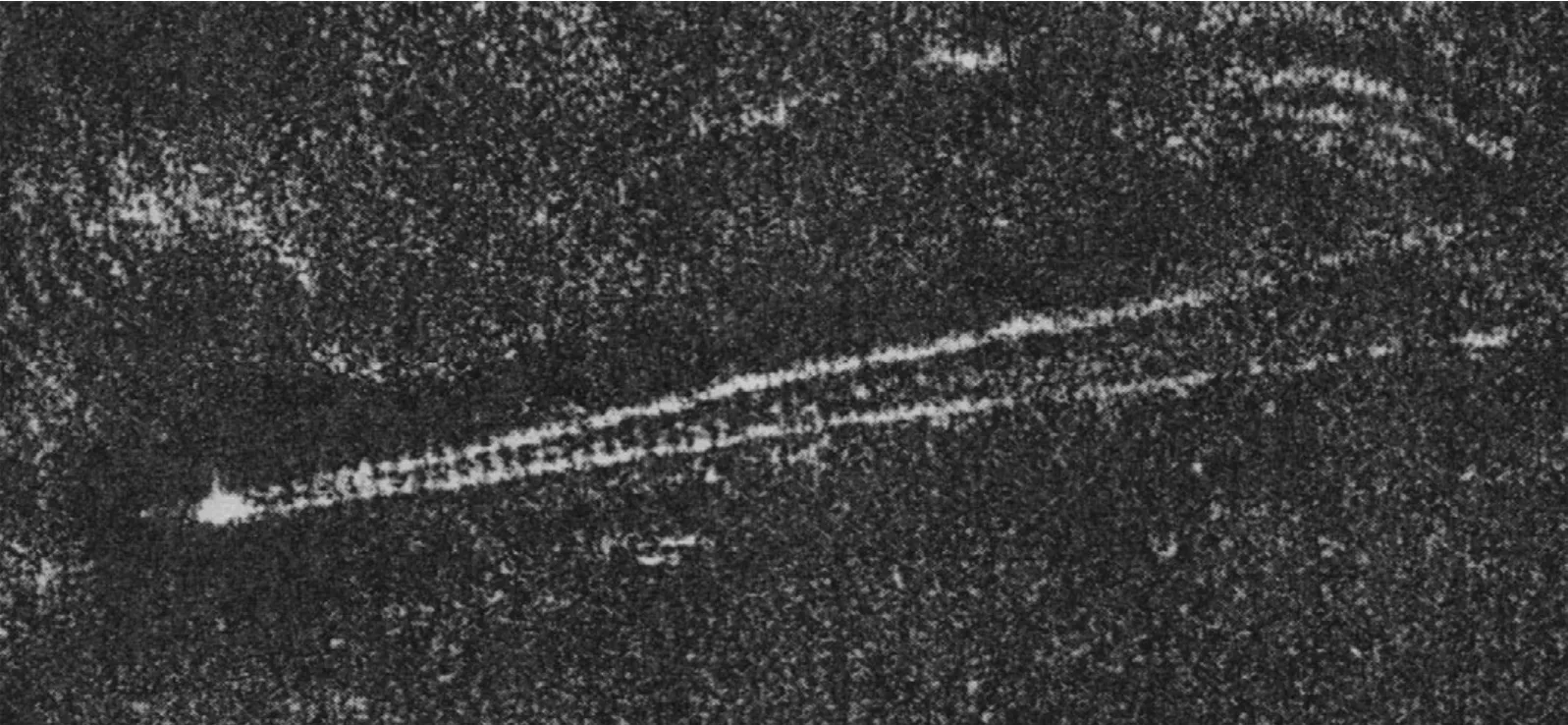
圖16 窄V型尾跡SAR圖像

圖17 艦船內(nèi)波尾跡SAR圖像
以遙感作為技術(shù)基礎(chǔ)的對(duì)地觀測(cè)系統(tǒng)在經(jīng)歷了四十余年的磨礪之后已跨入了一個(gè)嶄新的時(shí)期,海量數(shù)據(jù)的不斷積累,技術(shù)的不斷進(jìn)步、新的創(chuàng)新不斷涌現(xiàn),成就了今天遙感對(duì)地觀測(cè)在全世界的輝煌。以數(shù)以千計(jì)的衛(wèi)星和飛機(jī)作為平臺(tái),載著各種先進(jìn)觀測(cè)設(shè)備對(duì)地球進(jìn)行著全面的觀測(cè)。其中作為微波主動(dòng)遙感器的 SAR以其獨(dú)特優(yōu)勢(shì)成為其中不可替代的重要手段,它們觀測(cè)的尺度從宏觀的全球到局部的細(xì)節(jié),觀察周期從全球動(dòng)態(tài)季節(jié)變化到瞬態(tài)突發(fā)事件抓捕,所獲取的數(shù)據(jù)對(duì)人類認(rèn)識(shí)地球,探索和拓展發(fā)展空間,掌握全球動(dòng)態(tài)變化,提高對(duì)解決社會(huì)進(jìn)步?jīng)Q策的科學(xué)性,保障國(guó)家安全發(fā)揮了重大作用。
進(jìn)入21世紀(jì)以來,在陸地有限資源的利用已經(jīng)接近極限,人類賴以生存基礎(chǔ)遭到極大危機(jī)之際,以開發(fā)和占有海洋資源為核心成為國(guó)家政治經(jīng)濟(jì)活動(dòng)焦點(diǎn)。海洋是地球上最主要的未充分開發(fā)利用的資源寶庫(kù),一方面海洋與氣候變化研究、海底動(dòng)態(tài)與地震研究、海洋生態(tài)系統(tǒng)研究等全球尺度海洋大科學(xué)研究是必要的重之重,另一方面海洋生物技術(shù)和深海技術(shù)等海洋高技術(shù)領(lǐng)域快速發(fā)展,一些發(fā)達(dá)國(guó)家的深潛技術(shù)突破了萬(wàn)米,我國(guó)“蛟龍?zhí)枴陛d人潛水器也在今年下潛 7000米級(jí)海試,海洋立體監(jiān)視、監(jiān)測(cè)能力受到極大重視,正在致力于覆蓋全球大洋。
根據(jù)國(guó)家海洋科學(xué)和技術(shù)發(fā)展規(guī)劃,組成以可見光、紅外探測(cè)水色水溫為主的海洋一號(hào)水色衛(wèi)星;以微波探測(cè)海面風(fēng)場(chǎng)、海面高度和海溫為主的海洋二號(hào)動(dòng)力環(huán)境衛(wèi)星和以多光譜成像儀、合成孔徑雷達(dá)、微波散射計(jì)、輻射計(jì)、雷達(dá)高度計(jì)等多種遙感器為主載荷的海洋三號(hào)環(huán)境綜合衛(wèi)星;以及地面應(yīng)用系統(tǒng)和海上輻射校正與真實(shí)性檢驗(yàn)試驗(yàn)場(chǎng)為規(guī)模,形成以我國(guó)海洋衛(wèi)星為主導(dǎo)的主體海洋空間監(jiān)測(cè),期待著 SAR的動(dòng)力探測(cè)研究取得豐碩成果,在海洋經(jīng)濟(jì)、維護(hù)海疆主權(quán)和權(quán)益中發(fā)揮重要作用。
[1]余穎,朱敏慧.海面微波成像和雷達(dá)遙感體制研究[M].中國(guó)教育發(fā)展(香港)基金出版社,2009.Yu Ying and Zhu Min-hui.The System Research of the Sea Surface Microwave Imaging and Radar Remote Sensing[M].China Education Development (H.K.) Foundation Publishing House,2009.
[2]蔡樹群,甘子鈞.南海北部孤立子內(nèi)波的研究進(jìn)展[J].地球科學(xué)進(jìn)展,2001,16(2): 215-219.Cai Shu-qun and Gan Zi-jun.Progress in the study of the internal solution in the Northern South China Sea[J].Advance in Earth Science,2001,16(2): 215-219.
[3]Osborne A R and Burch T L.Internal solutions in Adaman Sea[J].Science,1980,208: 451-460.
[4]方欣華,杜濤.海洋內(nèi)波基礎(chǔ)和中國(guó)海內(nèi)波[M].青島: 中國(guó)海洋大學(xué)出版社,2005.Fang Xin-hua and Du Tao.Fundamentals of Oceanic Internal Waves in the China Seas[M].Qingdao: China Ocean University Press,2005.
[5]Alpers W.Theory of radar imaging of internal waves[J].Nature,1985,314(6008): 245-247.
[6]Thompson D R and Gasparovic R F.Intensity modulation in SAR imaging of internal waves[J].Nature,1986,320(6060):345-348.
[7]Lamb K G and Yan L.The evolution of internal wave undular bores: comparisons of a fully nonlinear numerical model with weakly nonlinear theory[J].Journal of Physical Oceanography,1996,26(12): 2712-2734.
[8]Liu A K,Chang Y S,and Hsu M K.Evolution of internal waves in the East and South Sea[J].Journal of Geophysical Research,1998,103(4): 7995-8008.
[9]Holloway P E,Pelinovsky E,Talipova T,et al..A nonlinear model of internal tide transformation on the Australian North West Shelf[J].Journal of Physical Oceanography,1997,27(6): 871-896.
[10]Phillips O M.The Dynamics of Upper Ocean[M].Cambridge University Press,1977.
[11]Zheng Q and Matis J H.Some applications,properties and conjectures for higher order cumulants of a Markovian stepping-stone model[J].Communications in Statistics:Theory and Methods,1993,22(12): 3305-3319.
[12]Liu A K,Holbrook J K,and Apel J R.Nonlinear internal wave evolution in the Sulu Sea[J].Journal of Physics Oceanography,1985,15: 1613-1624.
[13]Hughes B A.The effect of internal waves on surface wind waves 2 theoretical analysis[J].Journal of Geophysical Research,1978,83(C1): 455-464.
[14]Alpers W and Henning I.A theory of the imaging mechanismof underwater bottom topography by real and synthetic aperture radar[J].Journal of Geophysical Research,1984,89(C6): 10529-10546.
[15]Huang Weigen,Johnny Johannessen,and Werner Alpers.Spatial and temporal variations of internal waves in the Northern South China Sea SeaSAR[C].2008.
[16]種勁松,歐陽(yáng)越,李飛,等.合成孔徑雷達(dá)圖像海洋內(nèi)波探測(cè)[M].北京: 海洋出版社,2010.
[17]Zheng Q A,Li L,Guo X,et al..SAR imaging and hydrodynamic analysis of ocean bottom topographic waves[J].Journal of Geophysical Research.DOI:10.1029/2006JC003586,2006.
[18]Oumansour K,Wang Y,and Saillard J.Multifrequency SAR observation of a ship wake[J].IEE Proceedings-Radar,Sonar and Navigation,1996,143(4): 275-280.