變頻調速典型控制系統(二)
2012-09-22 03:19:50馬小亮
電氣傳動 2012年2期
關鍵詞:變頻器
馬小亮
(天津電氣傳動設計研究所,天津 300180)
第2講 通用機械的節能調速[1-3]
節能調速主要用于風機、泵、壓縮機等通用機械的傳動。它們原本不調速,交流電動機直接接電網,恒速工作。在工廠設計時電動機及機械設備容量按最大可能的壓力和流量選取,并為今后發展預留適當余量,工作時通常不需要這么大,只好借助閥門或擋板來把它們調到需要值,浪費了大量能量。改用調速傳動后,可以把閥門或擋板開到最大,通過降低電動機轉速來調節壓力或流量,把閥門或擋板浪費的能量省下,從而實現節能。改用調速傳動后,節能效果取決于電動機的負荷率,負荷率越低,節能效果越好,據統計平均節能1/3,效果顯著,因此被廣泛推廣應用。
這類傳動的負載轉矩與轉速平方成比例,功率與轉速3次方成比例,當轉速降到1/2時,負載轉矩只有1/4,功率僅剩1/8,所以它對調速范圍的要求一般≤2。這類傳動原本不調速,流量和壓力調節過程較慢,負載也比較平穩,因此它對調速的精度和響應的時間也沒什么特殊要求,只要能調速就行。針對這不高的調速要求,通常采用V/f控制的標量控制系統,對于大功率傳動,為改善啟動性能,有時也用無轉速傳感器的高性能調速系統(在大功率變頻器中,增加少許控制的復雜性已不影響設備成本)。
雖然這類傳動對調速性能要求不高,但它對生產的連續性要求較高,需要一些特殊控制環節,分述于后。
2.1 “旁路變頻器”
由于這類傳動原本是不調速的,而它對生產的連續性要求又較高,所以希望在變頻器故障時旁路變頻器,讓電動機直接接電網,轉速回到額定轉速,仍用閥門或擋板調節壓力和流量,維持生產。“旁路變頻器”主電路示于圖1。
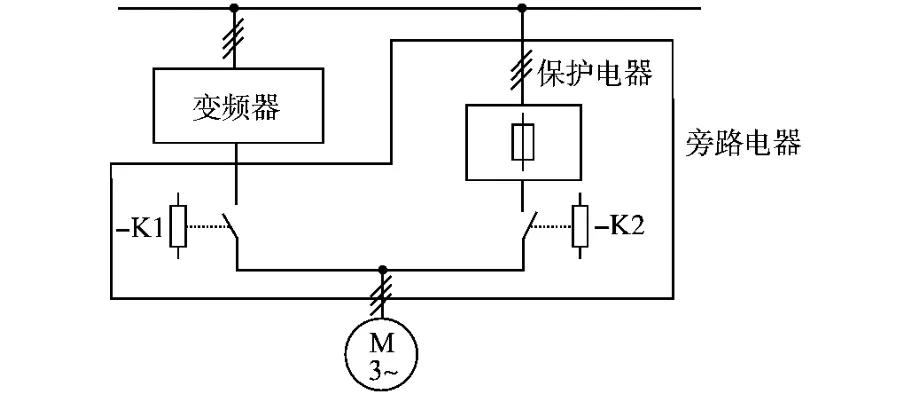
圖1 “旁路變頻器”主電路
圖1中K1和K2是交流接觸器。變頻器正常工作時K1閉合、K2分斷,電動機接變頻器,按調速模式工作。在需要“旁路變頻器時”,先分斷K1,隔離電動機與變頻器,延時toff時間后K2閉合,電動機接電網,加速至額定轉速后按恒速模式工作。在K1斷開至K2閉合之間設置一段完全斷電時間toff的原因是等待電動機消磁。電動機斷電后,定子電流雖然為零,可磁鏈不能馬上消失,因為在磁鏈減弱過程中,轉子繞組會感生電流阻礙磁鏈減小,需經3倍轉子時間常數Tr后才能使它降到零。在消磁過程中,由于旋轉磁場還存在,在定子繞組中仍感生電壓,若在這個感生電壓與電網電壓反相時合上開關K2,會造成大的定子電流沖擊。為避免這沖擊,要求toff>3Tr。異步電動機的toff和Tr可以從樣本和銘牌數據估算得出:
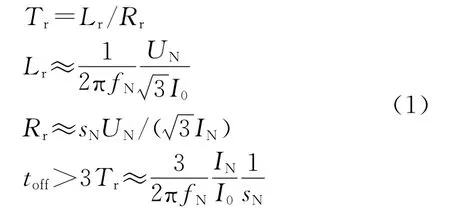
式中:Lr,Rr分別為轉子全電感和轉子電阻(測量值);UN,IN,I0分別為定子額定線電壓、電流和空載電流(有效值);fN,sN分別為額定頻率和額定轉差率。
下面給出幾個經驗數據供參考:電動機功率(kW)10…50…500,toff(s)0.7…1.6…3.6。
2.2 越過暫時失電功能和最高直流母線電壓Ud.max控制
在出現電網短時失電故障時,為保持生產的連續性,希望電壓型逆變器不停止工作,通過降低電動機轉速,把部分動能回饋至它的直流貯能電容,維持一個較低的直流母線電壓,使控制電路繼續工作(逆變器控制電源來自貯能電容電壓),待電網電壓恢復后電動機重新加速到原轉速,這功能被稱之為越過暫時失電(ride-through),又稱動能緩沖。
越過暫時失電(動能緩沖)功能用Ud.min控制實現,框圖示于圖2a,Ud.min控制波形示于圖2b。Ud.min控制的核心是Ud.min調節器1AUdR,它的輸入是逆變器直流母線電壓Ud與其最小值設定之差,輸出是高性能調速系統轉矩環ATL的附加轉矩輸入正常工作時1AUdR本應輸出正值,但由于調節器正限幅=0,所以對調速系統工作無影響,電動機工作在電動狀態,轉矩T>0。在t=t1時,電網開始失電,Ud開始下降。在t≥t2后,Ud略小于1AUdR退出正限幅控制開始工作,把轉矩T從正值拉到負值,電動機從電動狀態轉入再生狀態,電動機和被拖動機械的部分動能回饋至直流貯能電容,維持不變,使逆變器控制系統能繼續工作。在t=t3時電網恢復,來自電網中的能量使Ud升高1AUdR又正限幅控制退出工作,逆變器恢復正常,轉速回升至給定值。圖2b中TRT是失電跨越時間。如果調速系統是V/f控制系統,則1AUdR的輸出是V/f曲線發生器的附加頻率輸入在1AUdR工作期間,減小逆變器輸出的電壓和頻率,使電動機工作于再生狀態,維持如果沒有Ud.min控制環節,在電網失電后,Ud將下降至Ud.off,逆變器停止工作,電動機自由停車,如圖2b中Ud波形之虛線所示。
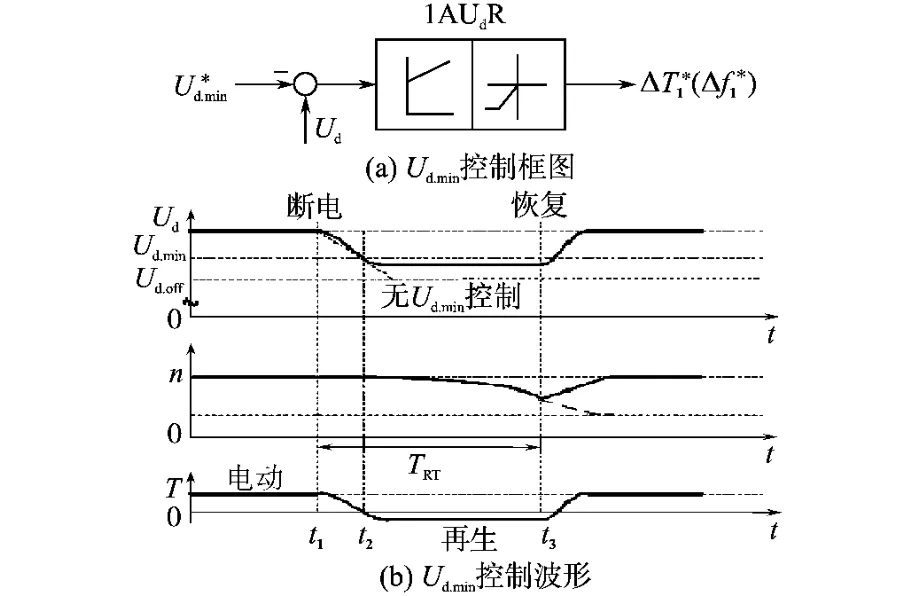
圖2 Ud.min控制框圖和波形
在電動機減速時,電機和負載的動能將回饋至直流母線,使其電壓Ud升高。如果減速較快及電機和負載轉動慣量大(例如風機傳動),送到直流母線的能量不能全部被吸收或饋回電網,則Ud將升至過壓保護動作值,導致停機。為保持生產的連續性,許多現場希望避免這種非事故停機發生,為此引入最高直流母線電壓Ud.max控制環節,示于圖3。Ud.max控制的核心是Ud.max調節器2AUdR,它的輸入是逆變器直流母線電壓Ud與其最大值設定之差,輸出是高性能調速系統轉矩環ATL的附加轉矩輸入正常工作時,2AUdR本應輸出負值,但由于調節器負限幅=0,所以,對調速系統工作無影響。在Ud升至略大于后,2AUdR退出負限幅控制開始工作。電動機減速時,轉矩為負值,加入后,減速轉矩值下降,回饋至直流母線的能量減小,維持Ud≈,從而避免過壓保護動作導致的非事故停機發生。如果調速系統是V/f控制系統,則2AUdR的輸出是V/f曲線發生器的附加頻率輸入在2AUdR工作期間,減小逆變器輸出電壓和頻率的下降速率,使電動機工作于再生狀態,減小回饋至直流母線的能量,維持

圖3 Ud.max控制框圖
2.3 轉速跟蹤啟動
轉速跟蹤啟動功能用于啟動正在旋轉中的電動機。泵和風機傳動有時會遇到在變頻器投入工作前電動機已在旋轉的情況,例如:啟動前在風道或管道中存在壓力,推動電動機旋轉;大型風機的機械慣量大,自由停車時間很長,在電動機尚未停止前又需要恢復工作;“旁路變頻器”后,變頻器故障排除,希望恢復調速工作模式等。電動機在這種情況下接至變頻器,如果變頻器的輸出頻率與電動機轉速不匹配,轉差率大,將導致電流沖擊。要解決這問題,需根據轉速來設置變頻器的初始頻率,而泵和風機傳動通常都無轉速傳感器,因此希望變頻器能自動檢測電動機的實際轉速,據此設置初始頻率,這就是轉速跟蹤啟動。
自動檢測轉速任務通過頻率搜索實現,其工作原理是:在逆變器輸出頻率與轉速相匹配時(fs=np/60,p 為電動機極對數),電動機功率最小。頻率搜索框圖見圖4,圖4中SFS是搜索頻率給定,輸出一個從1.0(對應于50Hz)逐漸降至0的頻率給定信號f*(t),經V/f曲線發生器得到定子頻率和電壓給定fs*和us*,為防止搜索過程中電流太大,令(5%~20%)us*作為PWM發生器的電壓輸入。在搜索過程中檢測逆變器直流輸入電流或用電動機電壓、電流瞬時值計算功率,當它們小于某門檻值時便停止搜索,并把這頻率值設置為逆變器初始頻率。從最高工作頻率開始搜索的原因是,在頻率高于轉速對應值時轉差率為正,電動機工作于電動狀態,不必擔心再生功率使直流母線電壓升高問題。如果正方向搜索沒找到所需頻率,則需從反方向最高頻率開始反向搜索。
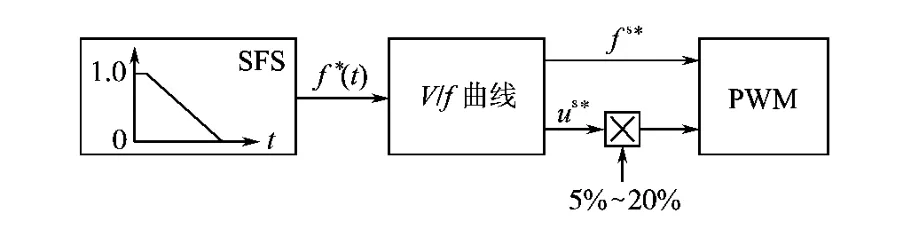
圖4 頻率搜索框圖
注意,為防止搜索過程中過電流,要求原V/f控制系統中的電流限制環節有效工作。
2.4 效率優化控制
對于泵和風機傳動,隨轉速降低,負載轉矩按平方減小,低速時電動機工作于負載轉矩非常小的工況,這時若仍維持額定磁鏈,鐵損大,效率低。如果隨轉速降低,適當減小電動機磁鏈,能降低鐵損,提高效率,電動機噪聲小。
減小磁鏈后,鐵損減少,銅損增加,磁鏈減弱多少合適,有個優化問題。從損耗分析知,若磁鏈與轉速成比例,能取得效率優化結果為

式中:Ψ,n為磁鏈和轉速相對值。
由于定子電壓相對值us≈Ψn,所以

當轉速從額定轉速(n=1.0)降至半速(n=0.5)時,磁鏈也應從額定(Ψ=1.0)減弱至一半(Ψ=0.5),定子電壓從額定(us=1.0)減至1/4(us=0.25)。
效率優化控制的實現方法:對于高性能調速系統,按式(2)設置磁鏈給定值(圖5a);對于V/f控制調速系統,按式(3),把V/f曲線從線性改為二次曲線(圖5b)。
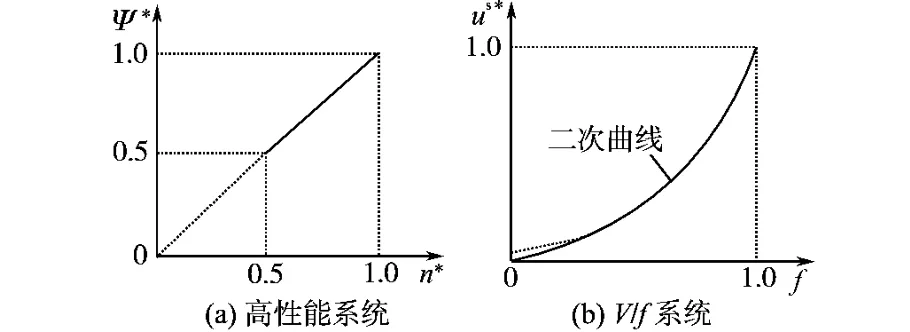
圖5 效率優化的實現
注意:節能調速的調速范圍一般≤2,即nmin≥0.5,圖5中n*(或f*)≤0.5段不用;效率優化控制只用于負載較平穩,變化慢的場合。
2.5 工藝閉環控制
某些節能調速傳動要求工藝閉環控制,例如:擠壓機傳動要求壓力閉環控制;泵傳動要求液位閉環控制;風機傳動要求風量閉環控制等,為此在許多通用變頻器中都設有供自由選用的工藝控制功能塊,示于圖6。
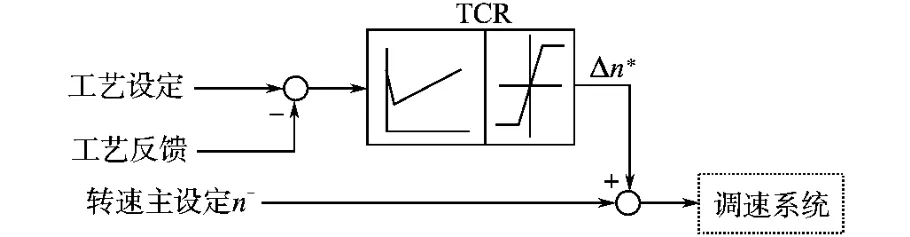
圖6 工藝控制功能塊
工藝控制功能塊的核心是工藝調節器TCR,它是1個PID調節器,其輸入是工藝設定量和工藝反饋量。工藝設定量可人為設定或來自上級數字控制器,一般是數字量。反饋量來自工藝參數傳感器,例如壓力計、液位計、流量計等,一般是4~20mA的模擬量或數字量。TCR的輸出是附加轉速給定Δn*,它與轉速主設定n*相加后,送至調速系統轉速給定輸入端。
[1]天津電氣傳動設計研究所.電氣傳動自動化技術手冊[M].第2版.北京:機械工業出版社,2005.
[2]中國電氣工程大典,第15卷(電氣傳動自動化)[M].北京:中國電力出版社,2009.
[3]馬小亮.高性能變頻調速及其典型控制系統[M].北京:機械工業出版社,2010.
(未完待續)
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
