近海域水下地形測量方法探析
2012-09-21 08:21:46高金平趙淑屏
中國科技信息 2012年19期
關鍵詞:測量
高金平 趙淑屏
中水北方勘測設計研究有限責任公司,天津市 300222
近海域水下地形測量方法探析
高金平 趙淑屏
中水北方勘測設計研究有限責任公司,天津市 300222
近海域水下地形測量采用常規的測量方法已不再適應,隨著CORS定位技術的發展,GPS配合數字化測深儀已成為當前主流的測量模式,本文結合近海域水下地形測量的具體應用和水下測量工作原理,給出一種切實可靠、高效的水下測量方法。
水下地形;CORS;測深儀;高程基準
引 言
水下地形測量在河道疏浚及水庫、港口、碼頭、橋梁等工程建設中發揮著重要作用,尤其在防洪減災的應用中彰顯出了巨大的經濟效益和社會效益,是現代水利工程中一項重要的工程技術。但在近海域水下地形測量時,由于受到風浪、潮汐,水深等因素的影響,常規的測量手段已不能完全適應,我們采用了CORS技術,結合RKT配合數字測深儀這種全新的測量模式,取得了非常好的效果。
1 常規測量方法
常規的水下地形測量方法有:
1)交會法:采用六分儀或經緯儀進行前方交會和側方交會;
2)極坐標法:適合于水面不寬、流速較小、無風浪的水域上;
3)斷面索定位法:在進行大比例尺水下地形測量時,由于水面窄、測深淺、測點密度大、測設精度要求高,多采用此法進行;
4)地面無線電定位法:適合于水域廣闊的湖泊、港口、河口和海洋上進行的測深定位,此方法定位精度高,操作方便,不受通視及氣候的影響。
2 GPS測量定位方法
利用CORS基站系統,采用實時動態測量(RTK)對測深點進行定位,它能夠實時地提供測站點在指定坐標系中的三維定位成果,并達到厘米級精度。
此次作業擬采用科力達公司生產的K9T雙頻RTK。精度指標為水平精度±1cm+1ppm,垂直精度±2cm+1ppm。
3 測深點的水深測量
水深測量采用回聲測深儀進行施測。施測時采用科力達測繪儀器公司所生產的SDE-28S型數字化回聲測深儀。該儀器測深范圍:0.39~300m,測深精度:0.01±0.1%。此儀器抗干擾能力強,回波信號數字化算法確保在復雜水下環境下跟蹤河底。輸出連續的可靠的水深數據。
對于淺水區域的水深測量,因為太大的船開不過去,可采用小船(或人工劃)的方式配合GPS+測深儀進行。如水域太淺(≤0.4米),可采用測深桿測量水深(或直接用GPS的對中桿進行量測)。
航道間距宜在20~30米,航點間距宜在20米左右。
4 潮汐改正
利用GPS RTK定位技術可實現無水位觀測的水下地形測量。
其原理如圖1。
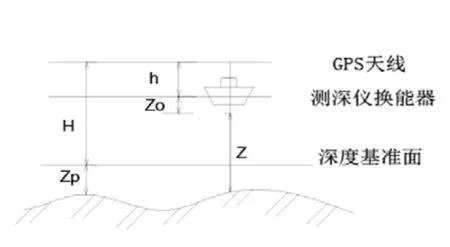
圖1
h為GPS天線到吃水線的高度
Z 為測深儀換能器設定吃水
Z為測量的水深值
Zp為繪圖水深
H為RTK測得的相對深度基準面的高程
Zp=Z+Zo-(H-h).
其中,H-h是瞬時水面至深度基準面的高度即水位值。當水面由于潮水或者波浪升高時,H增大,相應地Z也增加相同的值。根據上式,Zp將不變。因此,從理論上講,GPS RTK無驗潮測深,將消除波浪和潮位的影響,是一種較好的水深測量方法。
5 水深數據處理及成圖
5.1 數據預處理
數據預處理是對水深數據編輯與清理前做的必要改正。包括水位改正、吃水改正、聲速改正、時間延遲改正等。數據預處理軟件中的各項改正都有格式要求,把測量好的改正數按照軟件格式要求輸入,進行自動或人工改正。
5.2 定位數據的編輯與處理
影響定位數據精度的因素很多,如衛星信號質量、信號盲區等、甚至天氣、海況也有影響,使定位資料不可避免地出現錯誤。其中主要是偏離真實位置的“飛點”,應對這些可疑的數據進行剔除。
5.3 水深數據的處理
水深數據處理的主要任務是利用自動清理和人機互動的方式清理錯誤水深,剔除虛假信息,保留真實信息,剔除一些不可能的孤立點、躍點和噪聲點。
5.4 編輯成圖
編輯成圖采用南方公司的數字化專用軟件CASS成圖。可完成海岸地形和水下地形一體化成圖。可實現多用途數字化地形測繪與GIS管理功能。把數據處理后的DWG格式文件,在系統中進行數據屬性轉換,建模生成等深線或水下等高線,再進行地形圖編輯,得到符合要求的1:1000水下地形圖。
此外,測量成圖的具體要求按《水運工程測量規范》執行,但表達方式上需符合以下要求:
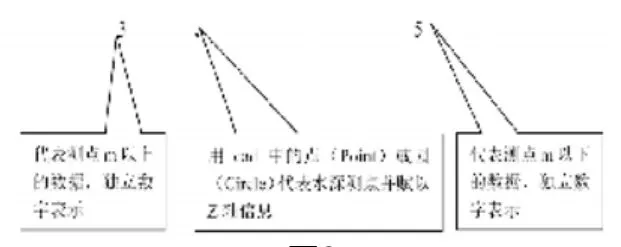
①測量單位應具備形成三維圖紙的條件,即可以水深點附以Z軸信息,請用下列表達方式。
上述一個水深點用三個獨立圖元表示。其中的定位點應放在一個單獨的圖層上。
②請不要用海圖的表達方式標注測點水深數據。
③正負關系的表達請參照規范執行,但給定位點所賦的Z值應為實際數值。
6 質量保證措施
6.1 為了保證測深成果的可靠性,我們應分時段校正時差,在測前測后選擇底質較硬,水深為2m左右的地方,用測深儀與測桿分別測量水深,來比較測深儀的技術性能是否正常。
6.2 水深測量作業前,結束后,應將流動站安置在控制點上進行定位檢查。作業中發現問題應及時進行檢驗和比對。
6.3 定位數據與測深應保證同步,否則應進行延時改正。
6.4 測深過程中測深結束后,應對測深斷面進行檢查,檢查斷面與測深斷面宜垂直相交,檢查點數不應少于5%,檢查斷面與測深斷面相交處,圖上1mm范圍內水深點的深度較差不應超過下表:

表1 深度檢查較差的限差
6.5 船臺的流動天線應牢固地安置在船側較高處并與金屬物體絕緣,天線位置宜與測深儀換能器處于同一垂線上。
6.6 在作業過程中,始終要注意保證作業人員及施測儀器的安全。做到以防為主,消除一切安全隱患。
7 結束語
通過實踐我們形成了一套成熟的水下地形測量的數據采集、處理和成圖技術,其要點為:
1)采用CORS(或基站)配合RTK技術,在相應的軟件支持下,指揮船老大按要求進行行駛,由計算機自動同步采集坐標數據和測深值;
2)利用軟件對水深值的系統誤差,特別是粗差進行處理,得到相對可靠的觀測值;
3)在相應軟件的支持下,形成等高線進行水下地形圖的繪制,并按要求輸出不同比例尺的水下地形圖。
利用CORS配合RTK技術+數字測深儀進行水下地形測量,是目前較為先進的、高效的測量方法,但其也有一定的局限性,如在陡峭的峽谷、河道還不能取代常規的測量方法,但隨著GPS技術的不斷發展,利用RTK配合數字測深儀進行水下地形測量將有更廣闊的前景。
10.3969/j.issn.1001-8972.2012.19.003
高金平,1962.2出生,山西臨縣人,大學本科,高級工程師,主持參加了南水北調中線一期、山西省引黃工程、黃河沙坡頭水利樞紐、援阿富汗帕爾旺水利工程等大、中型水利工程測量工作。現為中水北方勘測設計研究有限責任公司航測遙感院副院長。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00