一種復合多基地雷達密集多目標檢測的新方法
2012-09-19 11:30:38肖順平
電子與信息學報 2012年3期
關鍵詞:檢測
閔 濤 趙 鋒 肖順平
(國防科技大學電子科學與工程學院 長沙 410073)
1 引言
在利用常規探測手段的情況下,當多個目標位于雷達天線波束范圍內,且各目標的回波信號在時域或頻域難以分辨時,稱這些目標為不可分辨多目標或密集多目標。在防空反導背景下,如果雷達對密集多目標情況缺乏特殊處理能力,而只是一味地當作單目標而以傳統方法來處理的話,將會帶來一系列的嚴重后果。當前的單基地雷達往往具有好的距離分辨率,但角度分辨率比較差,從而導致不可分辨的目標測量,這可能引起目標檢測和跟蹤中的嚴重錯誤。在已發表的文獻中[1-4],相關研究人員對于解決這個問題作了一些嘗試,取得了不少研究成果,但大多還只是限于理論研究階段,而且由于實際應用環境的復雜性,理論上仍存在許多不完善之處。
雙/多基地雷達是最早出現的雷達體制,除了反隱身、抗干擾等傳統優勢[5],其在目標信息獲取、工作方式、技術實現等方面體現出的多樣性,使得利用雙/多基地雷達對密集多目標進行探測具備一定的可行性。文獻[6]利用多基地雷達消除多路徑假目標的影響。Bradaric等人[7]以多基地雷達模糊函數為工具對多基地雷達系統進行分析和設計,通過波形選擇、傳感器部署、接收機信號加權這3種方式及其聯合使用來改善雷達系統的分辨能力。文獻[8,9]同樣以多基地雷達模糊函數為工具,分析了空間相關和非相關多基地雷達系統的分辨性能。以上是利用雙/多基地雷達改善目標定位和分辨的一些例子,但涉及密集多目標探測的研究比較少,特別是信號處理方面的研究。
Nandakumaran等人[10]考慮一個在信號層次融合的復合雙基地雷達系統對密集多目標進行探測,但沒有分析檢測門限、目標起伏及復合雙基地雷達幾何配置對密集多目標檢測的影響,同時只考慮了2維平面,僅解決了 1維角度上的不可分辨問題。本文在此基礎上,針對 3維空間,利用 T/R-R2復合多基地雷達對密集多目標進行檢測,分析了可能影響檢測的各個因素,并重點研究了復合多基地雷達在不同檢測門限、目標起伏和幾何配置下的多目標檢測性能。
2 復合多基地雷達目標回波信號模型
復合雙/多基地雷達是在單基地雷達(T/R站)的基礎上,增加一個或多個相隔一定距離的接收機(R站)。本文考慮一個T/R-R2復合多基地雷達系統,其幾何配置如圖1所示,T/R站分別與R1站和R2站構成 T/R-R復合雙基地雷達系統。T/R站發射的信號經目標散射后分別被T/R站、R1站和R2站接收,3部接收機可以通過單基地雷達和多基地接收機1,接收機2間直接鏈路上的信號進行同步。
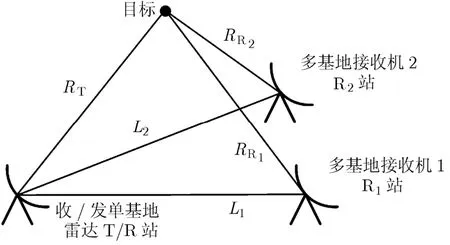
圖1 T/R-R2復合多基地雷達的幾何配置
在2維平面上,考慮T/R-R復合雙基地雷達,單基地雷達具有圓形距離等值線,其距離單元寬度由脈沖寬度確定;而雙基地雷達的距離和等值線為橢圓形,其距離單元寬度隨目標在距離和等值線上的不同位置而改變,但變化范圍不大。這樣發射機關注區域被單基地接收機的圓形距離等值線和雙基地接收機的橢圓形距離和等值線劃分為平面上的柵格,如圖2中實線所示,N,N1,N2分別為3部接收機的距離單元數。常規雷達距離分辨率比較高,假設這些柵格足夠分辨目標(即假設每個柵格最多存在一個目標,反之亦然)。考慮3維空間,如圖2所示,距離(和)等值線轉化為等值面。單基地接收機、多基地接收機1,接收機2距離單元數分別為2,2,1(垂直于紙面方向),4個目標分別位于3部接收機距離單元劃分的空間柵格中。在圖2的基礎上,圖3中多基地接收機 2垂直于紙面方向向外增加了一個距離單元,8個目標分別位于3部接收機距離單元劃分的8個空間柵格中。同樣假設這些空間柵格足夠分辨目標。則同一平面的多個目標,通過平面柵格區分開來;不同平面的目標,通過空間柵格區分開,這樣就實現了3維空間的多目標分辨。
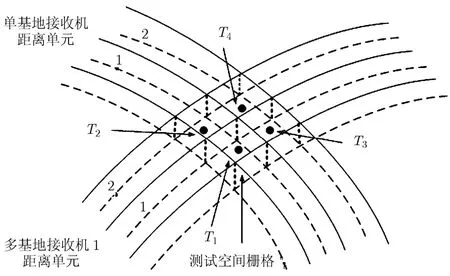
圖2 4目標存在情況下的復合多基地雷達的空間柵格(N=2,N1=2,N2=1)
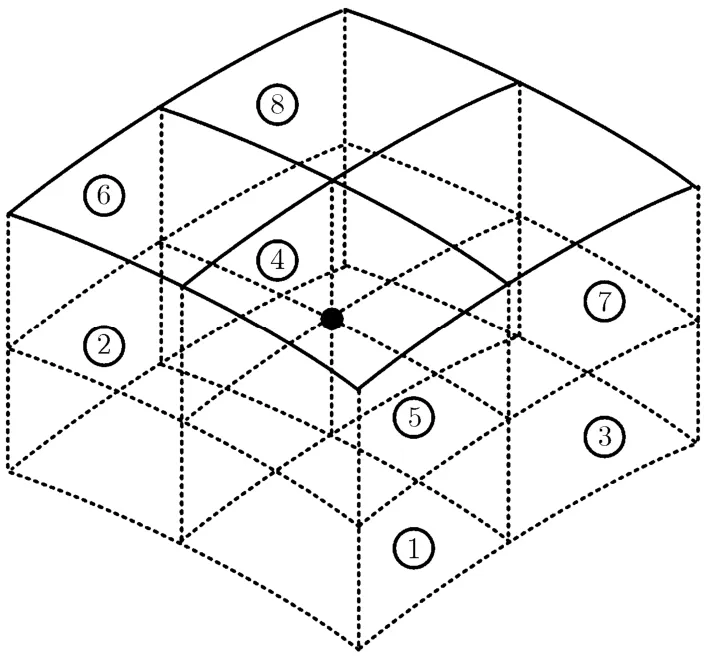
圖3 8目標存在情況下的復合多基地雷達的空間柵格(N=2,N1=2,N2=2)
假設3部雷達接收機參數相同,目標相對于多基地接收機1,接收機2的雙基地RCS也一致。單基地接收機和多基地接收機 1,接收機 2所接收的信號功率可表示為[10]

其中σM,σB為目標的單基地、雙基地目標RCS,RT為單基地接收機到目標的距離,,RR2分別為多基地接收機1,接收機2到目標的距離,KM為單基地接收機的雷達常數,包含發射機峰值功率、天線增益、雷達波長、綜合損耗等因素,KB為多基地接收機的雷達常數。從式(1)可看出,與單基地雷達距離等值線為圓形不同,雙基地距離和等值線為橢圓形;雙基地距離和等值線不與信噪比等值線共線,因此回波功率隨目標在距離和等值線上的不同位置而變化。這些幾何特性為解決不可分辨目標的問題提供了額外的信息。對應于單基地接收機一個距離單元的匹配濾波輸出可表示為[10]
其中SMI和SMQ為同相和正交兩個通道的分量,由信號和噪聲疊加的形式表示,為單基地相位角。不失一般性,噪聲nMI,nMQ可認為服從零均值高斯分布,方差為。類似地對應于多基地接收機 1,接收機 2一個距離單元的匹配濾波輸出同相和正交通道的輸出分量可表示為
假設目標RCS起伏模型為Swerling II型(后面的仿真實驗將證明,此假設條件下的推導結果對其它起伏類型的目標仍然適用),目標由幾個相等強度的散射點組成,散射點都具有均勻分布的相位角φM,則脈沖間目標散射面積電壓值服從瑞利分布,即服從瑞利分布,相位因子可視為在[0,2π]內均勻分布,則服從零均值高斯分布,即方程式(2)中兩式的第 1項均服從零均值高斯分布,由于噪聲也服從零均值高斯分布,因此同相和正交信號均服從零均值高斯分布,即


其中P為散射點的數量,σp為第P個散射點的RCS,φp為第P個散射點相對于第1個散射點的散射場相位。由于Swerling II型目標的散射點具有均勻分布的相位角,通過將確定的相位角φp合成為φB可將單基地接收機的信號分布形式擴展到多基地接收機的情況,即


其中NM和NB1,NB2分別表示給定單基地接收機距離單元、多基地接收機 1,接收機 2距離單元中多目標的個數。單基地功率增益因子gM對于給定的單基地距離單元為常數,而雙基地功率增益因子沿給定雙基地距離單元會發生變化,RTj,RTk為目標到發射機的距離,RR1j,RR2k為目標到多基地接收機1,接收機2的距離。

3 復合多基地雷達信號融合
在密集多目標情況下,復合多基地雷達目標回波包含來自單基地接收機的同相信號和正交信號,以及來自多基地接收機 1,接收機 2的同相信號和正交信號。F為雷達發射子脈沖的個數,M,B1,B2分別為可能包含目標的單基地接收機距離單元、多基地接收機1距離單元、多基地接收機2距離單元的數目。根據第2節的討論,以上信號的分布形式可表達為

根據式(7),考慮到3部接收機距離單元相交形成空間柵格,式(8)中的方差可表達為
其中為柵格(i,j,k)中目標的平均 RCS,和,分別為單基地和多基地接收機1,接收機2的功率增益因子。給定單基地接收機和多基地接收機 1,接收機 2距離單元的概率密度函數可表示為

對于某柵格(I,J,K),為了判斷其中是否存在目標,將式(12)對xIJK求導并令導數為零,使L(Z)取得極值(最大值),從而得到xIJK估計值。由于xIJK與脈沖積累數、目標個數等諸因素有關,根據導數方程難以求得其解析表達式,只能通過數值仿真求L(Z)的最大值得到最優xIJK值,即

將最優值與門限相比較,得出柵格(I,J,K)中是否存在目標,從而得到多目標的檢測結果。假設H0代表柵格(I,J,K)內不存在目標,H1代表柵格(I,J,K)內存在目標。根據檢測統計量及檢測門限η,判決準則δ可表示如下:

4 仿真結果及性能分析
仿真中假設復合多基地雷達所檢測的多個目標的位置如圖3所示。多目標所在區域距離單基地接收機、多基地接收機1,接收機2的距離分別為80 km,50 km,50 km。假設各接收機距離單元的寬度均為25 m(忽略多基地接收機距離單元寬度隨目標在距離和等值線上的不同位置而變化)。雷達發射機峰值功率為350 kW,中心頻率為4 GHz,發射天線增益、各接收機天線增益均為 40 dB,發射子脈沖個數為10。目標起伏默認均為Swerling II型,均具有2 m2的平均RCS。蒙特卡洛仿真次數為10000。
以(X,Y,Z)表示目標所在的空間柵格,X,Y,Z分別表示目標所在單基地接收機、多基地接收機 1,接收機 2的距離單元序號。結合圖2,圖3,目標T1位于測試空間柵格(1,1,1),目標T2,T3,T4,T5,T6,T7,T8分別位于相鄰空間柵格(1,2,1),(2,1,1),(2,2,1),(1,1,2),(1,2,2),(2,1,2),(2,2,2)。單目標情況下,T1位于測試柵格(1,1,1),假設H0和H1分別表示測試柵格內不存在目標或存在目標的情況。多目標情況下,T1位于測試柵格(1,1,1),其它目標位于鄰近空間柵格,假設H0和H1分別表示當鄰近柵格一直存在目標時,測試柵格內不存在目標或存在目標的情況。仿真目的是分析不同條件下各接收機同一距離單元內的角度不可分辨目標和不同距離單元內的目標對目標T1檢測的影響。
4.1 最優平均RCS概率密度仿真結果
首先,不考慮與門限比較后的檢測結果,只考慮使L(Z)取得最大值的最優平均RCS的分布情況。圖4給出了不同目標個數、不同信噪比情況下最優平均RCS的概率分布曲線。
根據檢測準則,最優平均RCS的分布越是集中于2 m2附近,目標的檢測效果越好。從圖4可以看出,平均RCS的分布情況隨著信噪比的增大而更有利于對目標T1的檢測。隨著目標數量的增加,同一距離單元內的角度不可分辨目標對測試柵格中的目標檢測會有干擾。比較圖4(a)-4(f)可以看出,增加一個目標后,目標T1的平均RCS分布情況明顯變差,但影響程度不一:T2,T5與T1位于單基地接收機同一距離單元內,同時T5與T1位于多基地接收機1同一距離單元內,T2與T1位于多基地接收機2同一距離單元內,T2,T5的影響均較大;而T4與T1僅位于多基地接收機 2同一距離單元內,T6與T1僅位于單基地接收機同一距離單元內,相對T2,T5影響較小;T8與T1不在單基地接收機或多基地接收機1,接收機2同一距離單元內,所以T8對T1的檢測影響非常小,圖4(a),4(f)中最優平均 RCS的分布情況基本相同。從圖4(g),4(h),4(i)中可以看出,目標數量增加,檢測性能將進一步變差;圖4(i)中8目標同時存在,目標T1的平均RCS分布情況最差,特別是在較低信噪比情況下比較明顯。
4.2 檢測概率仿真結果
圖5,圖6分別給出了不同目標個數、不同信噪比情況下檢測概率與檢測門限、目標到多基地接收機1,接收機2距離間的關系曲線。從圖5(a)-5(c)可以看出,檢測概率隨著信噪比的增大而增大,與圖4中最優平均RCS的概率分布情況相吻合。同時檢測概率隨著檢測門限的增大而增大。圖5(d),5(e)表明,在高信噪比情況下,目標數量增多,檢測概率變小。從圖5(f)可以看出,低信噪比情況下,目標數量增多,當檢測門限較大時,檢測概率依然變小;但當檢測門限較小時,檢測概率反而變大。
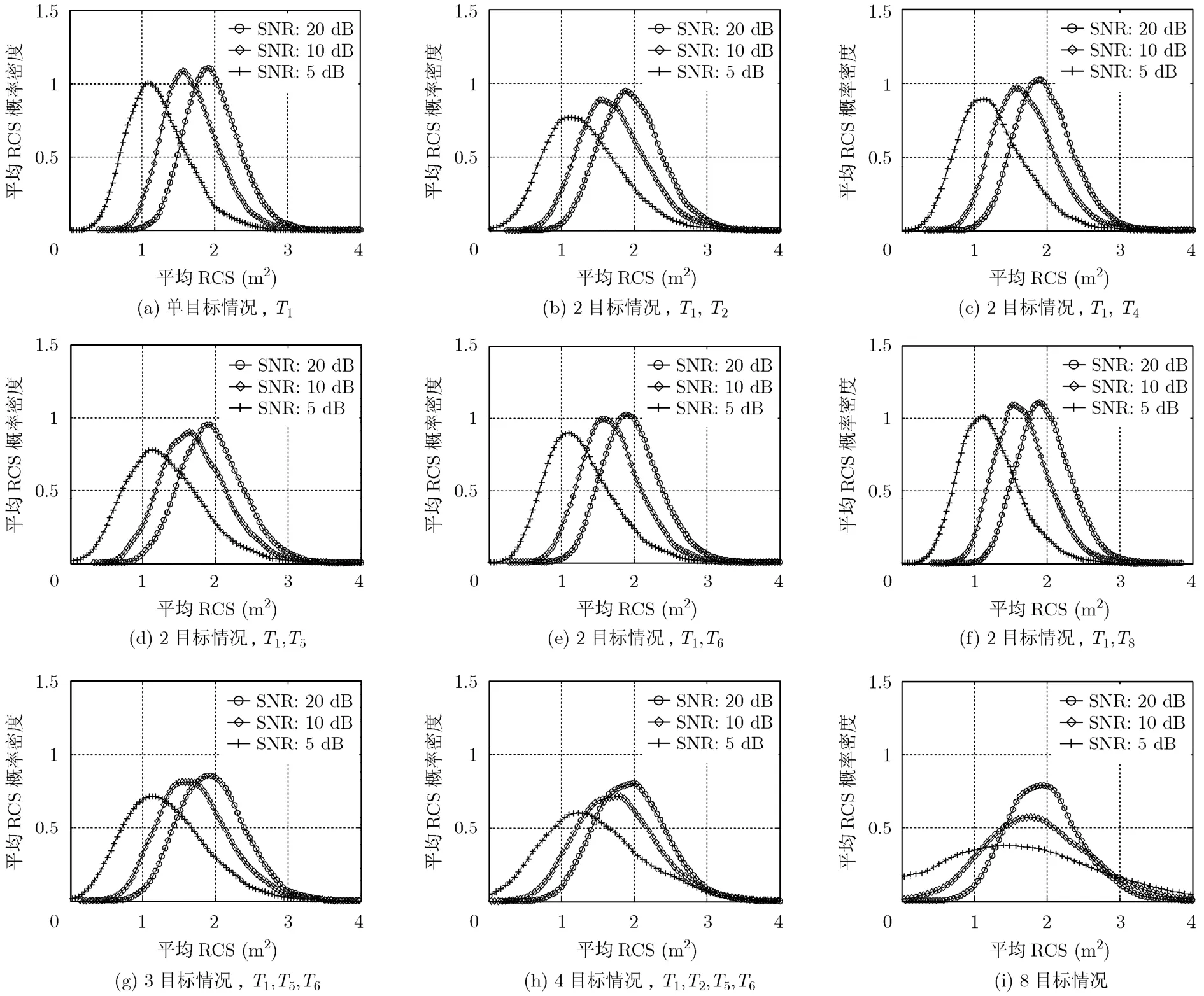
圖4 最優平均RCS的概率分布(RT=80 km,RR1=50 km,RR2=50 km)
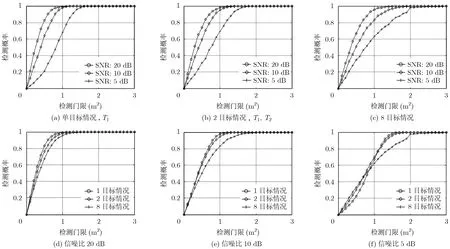
圖5 檢測概率與檢測門限關系曲線(RT=80 km,RR1=50 km,RR2=50 km)
從圖6(a),6(b)可以看出,目標到單基地接收機、多基地接收機2距離RT,RR2不變情況下,目標到多基地接收機1距離RR1在20-100 km之間變化時,對檢測概率影響比較小。從圖6(c)可以看出,RT,RR1不變,RR2改變或RR1,RR2不變,RT改變帶來的影響也是相似的。由于模型只利用了復合多基地雷達的距離信息,在雷達徑向距離分辨率足夠高的情況下,只要復合多基地雷達的幾何配置能夠保證3個接收機的距離單元相交后形成的空間柵格足夠分辨目標,其它的幾何配置因素就不會對密集多目標的檢測產生大的影響。同時,我們還可以從圖6中再次印證圖4,圖5中的結論:在各種目標數量情況下,檢測概率隨著信噪比的增大而增大;比起單目標檢測情況,目標數量的增加會導致檢測效果變差,這在高信噪比的情況下可以體現出來,而在低信噪比情況下卻相反,這是由于選擇的門限值為0.5,比較低,結合圖5(f)也可得出相同結論。因此,結合圖5,圖6得出結論,在目標數量、信噪比、檢測門限選擇方面要有一個綜合的考慮,以取得最好的檢測效果。
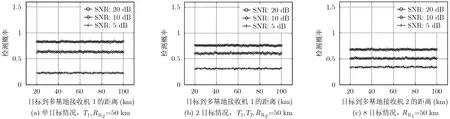
圖6 檢測概率與目標到多基地接收機距離關系曲線(η=0 .5,RT =80 km)
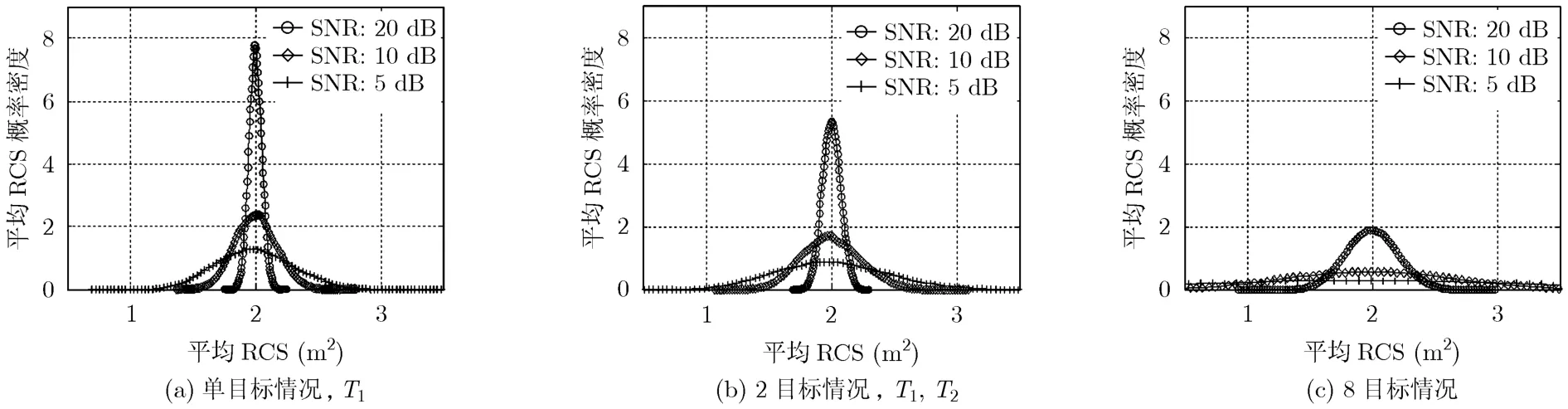
圖7 Swerling 0型目標最優平均RCS的概率分布(RT=80 km,RR1=50 km,RR2=50 km)
4.3 其它目標起伏類型條件下仿真結果
(1)最優平均RCS概率密度仿真結果 圖7,圖8分別給出了Swerling 0,IV型目標起伏條件下最優平均RCS的概率分布曲線。可以發現,對于Swerling 0和IV型目標來說,信噪比及其它目標對所檢測目標最優平均RCS概率分布的影響與Swerling II型目標相似:平均RCS的分布情況隨著信噪比的增大而更有利于對目標T1的檢測。隨著目標數量的增加,同一距離單元內的角度不可分辨目標對測試柵格中的目標檢測會有干擾。
(2)檢測概率仿真結果 圖9,圖10給出了3種目標起伏條件下的檢測概率仿真結果,目標數量分別為1,2,8,其它多目標假定情況下有相似的結果。SNR為信噪比,η為檢測門限值。圖9中,不同數量目標情況下,3種目標起伏條件下的檢測概率隨著信噪比的增大而增大,Swerling II型起伏條件下檢測概率最小,Swerling 0型起伏條件下檢測概率最大。圖10中,3種目標起伏條件下,RT,RR2不變時,RR1在20-100 km之間變化時,對檢測概率的影響比較小,Swerling II型起伏條件下檢測概率最小,Swerling 0型起伏條件下檢測概率最大。隨著目標數量的增多,3種目標起伏條件下的檢測概率均有所下降。
圖7-圖10中的仿真結果表明,雖然Swerling II型目標為本文推導的假設條件,其它兩種目標起伏類型雖然不符合本文算法的假設條件,但這兩種情況下檢測算法仍然有效。
圖4-圖10中不同條件下密集多目標檢測的仿真結果對比表明,目標到3部接收機的距離變化以及各接收機不同距離單元中的目標干擾對檢測的影響比較小,信噪比、目標數量、目標起伏、各接收機同一距離單元內的角度不可分辨目標的干擾以及檢測門限是影響檢測性能的主要因素。

圖8 Swerling IV型目標最優平均RCS的概率分布(RT=80 km,RR1=50 km,RR2=50 km)
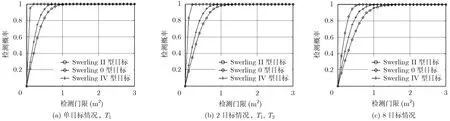
圖9 不同目標起伏條件下檢測概率與檢測門限關系曲線(SNR=20 dB,RT=80 km,RR1=50 km,RR2=50 km)
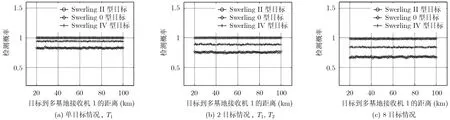
圖10 不同目標起伏條件下檢測概率與目標到多基地接收機1距離關系曲線(η=0 .5,SNR=20 dB,RT =80 km,RR2=50 km)
5 結束語
提高雷達對密集多目標的探測能力是當前雷達技術領域所面臨的前沿課題和緊迫任務,本文通過T/R-R2復合多基地雷達系統的信號融合,利用距離信息對不同數量的密集多目標進行了檢測,并分析了信噪比、目標數量、目標起伏、檢測門限和復合多基地雷達幾何配置等因素對檢測性能的影響。本文的研究成果,不僅能用于對雙/多基地雷達密集多目標檢測性能的分析,還能為雙/多基地雷達布站提供一定的理論參考。本文融合的信息為徑向距離,可利用的信息還包含切向距離、角度、徑向速度等。對于包含在單個接收機同一距離單元內的多個目標,研究通過去相關信號處理算法,消除同一距離單元內其它目標的干擾,改善密集多目標探測性能,是可以進一步拓展的工作。
[1]Peebles P Z and Berkowitz R S.Multiple-target monopulse radar processing techniques[J].IEEE Transactions on Aerospace and Electronic Systems,1968,4(6):845-854.
[2]Sinha A,Kirubarajan T,and Bar-Shalom Y.Maximum likelihood angle extractor for two closely spaced targets[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(1):183-203.
[3]Zhang Xin,Willett P K,and Bar-Shalom Y.Monopulse radar detection and localization of multiple unresolved targets via joint bin processing[J].IEEE Transactions on Signal Processing,2005,53(4):1225-1236.
[4]Nandakumaran N,Sinha A,and Kirubarajan T.Joint detection and tracking of unresolved targets with monopulse radar[J].IEEE Transactions on Aerospace and Electronic Systems,2008,44(4):1326-1341.
[5]楊振起,張永順,駱永軍.雙(多)基地雷達系統[M].北京:國防工業出版社,1996:19-22,254.Yang Zhen-qi,Zhang Yong-shun,and Luo Yong-jun.Bistatic(Multistatic)Radar Systems[M].Beijing:Publishing House of National Defence Industry,1996:19-22,254.
[6]Seliga T A and Coyne F J.Multistatic radar as a means of dealing with the detection of multipath false targets by airport surface detection equipment radars[C].2003 IEEE Radar Conference,Huntsville,Alabama,USA,2003:329-336.
[7]Bradaric I,Capraro G T,Brady S H,et al..Multistatic measurements in a controlled laboratory environment[C].2010 IEEE Radar Conference,Washington DC,USA,2010:266-270.
[8]Derham T.Doughty S,Baker C,et al..Ambiguity functions for spatially coherent and incoherent multistatic radar[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(1):230-245.
[9]Adjrad M and Woodbridge K.A framework for the analysis of spatially coherent and incoherent multistatic radar systems[C].2011 7th International Workshop on Systems,Signal Processing and Their Applications,Tipaza,Algeria,2011:155-158.
[10]Nandakumaran N,Sinha A,and Kirubarajan T.Hybrid radar signal fusion for unresolved target detection[C].Signal and Data Processing of Small Targets 2007,San Diego,California,USA,2007,Proceedings of SPIE Vol.6699,669911,1-8.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48