高速公路車載式自適應限速裝置的研究
2012-09-19 13:24:38宋文山
自動化儀表 2012年11期
宋文山 張 凱
(南京信息工程大學信息與控制學院,江蘇 南京 210044)
0 引言
目前,我國正在加速建設高速公路氣象監測預警系統,大量的高速公路氣象監測站隨之投入使用。現有的監測預警系統按照“監測-預報-管理決策”的方式執行。該方式在應對一般大尺度、可預見性強的惡劣天氣時發揮了重要作用[1],但在應對尺度較小、突發性較強的惡劣天氣時,往往暴露出系統反應遲緩、控制精度差等缺陷。在交通管理中,只有采取合理的限速方法和限速值,使駕駛員的行為變得更加一致,才能保障道路的安全與暢通[2]。針對不同的交通狀態和環境條件采取不同的限速策略,不僅可以有效地增加高速公路的通行能力、減少行程時間,還能減少事故的發生并降低駕駛員的駕駛強度[3]。
針對現有道路氣象預警系統的不足和實施高速公路變限速管理所面臨的困難,設計了一種新型車載式自適應限速裝置;并以該車載裝置為基礎,綜合現有的高速公路氣象檢測系統以及信息網絡,構建高速公路自適應限速管理系統。車載裝置用來接收和分析行駛區域內的實時氣象數據,并自動設定與當前路段環境相匹配的限速值,以實時監測車輛的行駛速度。同時,該裝置還可以監督和記錄超速行駛行為,從而在惡劣的天氣條件下指導駕駛員安全駕駛。
1 系統概述
以車載限速裝置為基礎,綜合現有的高速公路自動氣象站及高速公路管理信息網絡資源,構成了高速公路自適應限速管理系統。系統結構圖如圖1所示。
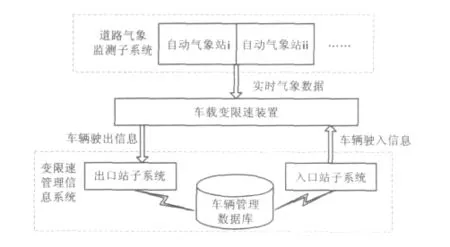
圖1 高速公路自適應限速管理系統Fig.1 Adaptive speed limit management system of expressway
安裝在道路沿途的自動氣象站能夠檢測溫度、濕度、能見度及降雨量等氣象數據,并以廣播的方式將信息發出。路過車輛所搭載的限速裝置接收到該區域內的氣象信息,按照預設的“氣象條件-限速值”映射規則更新當前的限速值。裝置內的GPS模塊對車輛進行全程測速,顯示實時車速并記錄所有的超速行為。當修改限速值和車速過高時,裝置發出相應的提示和告警。在入口站,工作站PC向車載限速裝置寫入上路信息(包含車輛基本信息和入口站信息等);到達出口站時,工作站PC從車載裝置中讀出上路信息以及超速記錄等信息。在車輛的行駛過程中,車載限速裝置將發揮指導和監督的作用。
2 硬件結構
車載式自適應限速裝置主要由單片機及存儲單元、GPS模塊、無線通信單元、顯示與告警單元組成,可實現速度監測、自動調整限速、告警提示以及信息的交換和存儲等功能。裝置的功能結構如圖2所示。
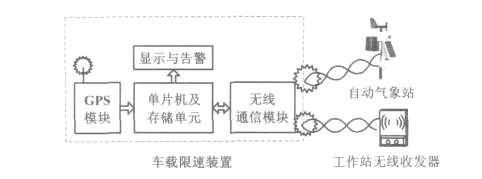
圖2 車載裝置功能結構圖Fig.2 Functional structure of the vehicle-mounted device
2.1 單片機及存儲單元
車載裝置采用MSP430F149單片機作為控制核心。MSP430系列單片機是一種性能優越的單片機,它針對小型化便攜式設備的應用需求,對功耗進行優化;多時鐘能夠降低功耗,延長電池的使用時間。這一改進對于依靠電池供電的車載設備而言非常重要。MSP430F149是一款16位的精簡指令集(RISC)單片機,相比8位單片機,它在性能方面有了很大提升。其具有較強的計算能力,能夠實時處理GPS數據、分析氣象數據和調整限速值。單片機及存儲單元電路原理圖如圖3所示。
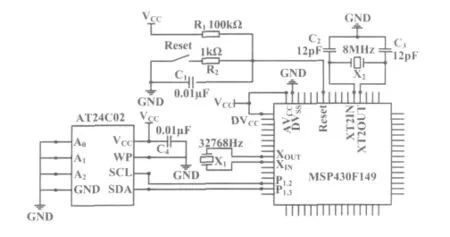
圖3 單片機及存儲單元電路原理圖Fig.3 Principle of the circuitry of MCU and storage unit
圖3中,X1為32 768 Hz的外部低頻晶體振蕩器,它為片內輔助系統提供時鐘基準;X2為8 MHz的高頻晶體振蕩器,它為片內主系統提供時鐘基準,保證單片機低耗高效工作。R1、R2、C1和電鍵Reset構成單片機的復位電路。AT24C02為電可擦除可編程只讀存儲器(EEPROM)芯片,可存儲2 048 B數據,用來存放工作站錄入的信息和行駛過程中的超速記錄,從而保證存儲的信息掉電不消失。
2.2 GPS與無線通信模塊
GPS模塊GS-92m用來實現車速檢測和車輛定位功能,無線通信模塊CC1100用來實現車載裝置與自動氣象站之間的信息交互。GPS與無線通信模塊接口電路原理圖如圖4所示。
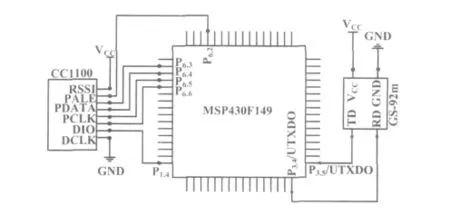
圖4 GPS與無線通信模塊接口電路原理圖Fig.4 Principle of the interface circuitry of GPS and wireless communication module
GS-92m模塊擁有20個衛星信號通道,在熱啟動模式下,平均定位時間僅需1 s;在冷啟動模式下,平均定位為為42 s。模塊的圓周定位誤差小于10 m,測速精度為0.1 m/s、測速范圍為0~515 m/s,該定位和測速精度可滿足高速公路車輛測速的要求。該模塊小巧輕便,外觀尺寸僅為15 mm×13 mm×2 mm,質量為3 g,內部集成了SIRF3的外圍電路,只需4根導線即可與單片機系統連接。GS-92m工作于3.3 V電壓下,數據輸入(RD)、輸出(TD)引腳分別與MSP430單片機的 P3.4、P3.5引腳相接。GS-92m 與單片機 MSP430 采用相同的串行通信標準,波特率為9 600 bit/s,具有8位有效數據位、1位停止標志位,無校驗位。
無線收發模塊基于CC1100芯片,內部集成了射頻發射器、射頻接收器、PLL頻率合成器以及可編程控制電路等多種功能模塊。該芯片在433 MHz免執照頻段工作,接收靈敏度典型值為-110 dBm,可自動校準接收和發送頻率,最高通信速度可達78.6 kbit/s。CC1100的主要工作參數可通過其串口編程設定,使用靈活方便。CC1100芯片提供3種數據編碼方式和多種微控制器接口方式。
采用CC1100與少量外圍元件,再配合一個微控制器,便可組成一個完整高效的射頻(radio frequenay,RF)收發系統。該射頻模塊使用標準的8針扁平電纜連接,1、8號引腳為電源引腳,2~7號引腳依次對應CC1100芯片的 RSSI、PALE、PDATA、PCLK、DCLK、DIO 數據和控制管腳。
2.3 顯示與告警單元
顯示單元主要由6只共陰極數碼管構成,6只數碼管分為A、B兩組。其中,A組顯示當前限速值,B組顯示實時車速。由于MSP430F149是一款低功耗的單片機,其I/O端口的驅動能力十分有限,所以在數碼管的段選信號、位選信號與 MCU之間增加了2片74HC573芯片,用作緩沖驅動,這樣既可以正常驅動數碼管,又可以保護MCU的I/O端口不會因電流過大而損毀。
顯示及告警單元電路原理圖如圖5所示。
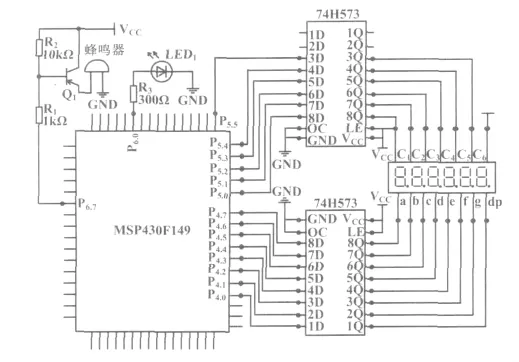
圖5 顯示及告警單元電路原理圖Fig.5 Principle of the circuitry of display and alarm unit
告警單元由蜂鳴器和紅色LED電路組成,使用一個PNP型三極管來驅動蜂鳴器。如果P6.7端口輸出高電平,PNP三極管將導通,蜂鳴器發聲;如果 P6.7端口輸出低電平,PNP三極管截止,則蜂鳴器被關閉。通過對定時器編程可驅動P6.7輸出不同占空比的PWM波,就可以讓蜂鳴器發出不同的音調和節奏。定時器也可以驅動LED按照不同的節奏閃爍。車速越快,越接近當前限速值,蜂鳴器發出的音調就越高、節奏越快、紅色的LED閃爍越迅速,從而有效地提醒駕駛員控制車速。
3 程序設計
3.1 限速裝置程序主流程
車載式自適應限速裝置的工作程序主要由工作站服務子程序、GPS測速子程序、氣象數據接收與限速值自設定子程序和超速判斷及告警子程序組成。當車輛駛入高速公路時,入口站子系統向車載限速裝置錄入車輛基本信息與入口站編號,發送指令啟動限速裝置的GPS及顯示模塊。
在車輛行駛過程中,GPS每秒更新一次當前車速及定位信息,刷新數碼管顯示的車速。超速判斷子程序比較實測車速與當前限速值后,根據差值大小作出不同的告警響應。如果確定為超速,則生成超速行為條目。該條目包含超速時的車速、限速值和位置坐標等信息。
在經過高速公路氣象站時,車載裝置接收氣象信息,按照映射規則,自動調整并刷新數碼管顯示的當前限速值。當車輛抵達高速公路出口站時,車載裝置響應工作站設備指令消息,將車輛基本信息、入口編號以及超速記錄發送給相應的工作站設備。當信息發送完成后,車載裝置關機,后續收費及處罰等工作由出口站子系統完成。
3.2 GPS 數據處理
車載裝置選用的GS-92m模塊可輸出GPGGA、GPGSA、GPRMC等多種格式的GPS數據,用戶可根據需要選擇所需輸出數據的格式和頻率。GPRMC為最小GPS數據格式,其定義為:$ GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<CR>。
各數據段具體定義如下。
① 標準定位時間:hhmmss.sss。
②定位狀態:A=數據可用、V=數據不可用。
③ 緯度:ddmm.mmmm。
④ 緯度區分:北緯=N、南緯=S。
⑤ 經度:dddmm.mmmm。
⑥ 經度區分:東經=E、西經=W。
⑦ 相對位移速度:0.0 ~1 851.8 knots。
⑧ 相對位移方向:000.0 ~359.9°。
⑨ 日期:ddmmyy。
⑩度數。
?<CR>為回車符,標志著一條GPRMC語句的結束。
對GS-92m模塊進行編程,選擇每秒輸出一條GPRMC語句。該語句包含了限速裝置所需的速度和定位信息。GPRMC數據從P3.5引腳輸入到MSP430單片機,通過中斷響應的方式完成對GPS數據的解析操作。
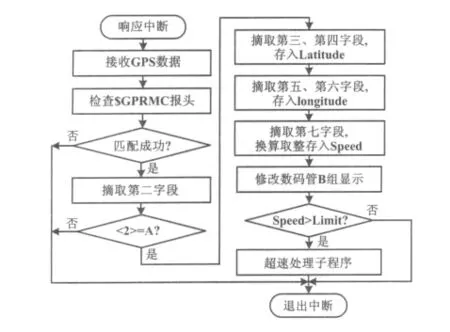
圖6 GPS數據解析程序流程圖Fig.6 Flowchart of GPS data analyzing program
GPS數據解析程序流程如圖6所示。GPS數據解析程序首先識別GPRMC語句頭“$GPRMC”,然后判斷數據是否有效,若為無效數據則拋棄。對于有效數據(即定義的第二個字段為字母A),則依次讀取第三、第四字段并存入變量Latitude,讀取第五、第六字段并存入變量Longitude,第七字段值即為當前車速值。速度值單位為knots(節),將速度值按1 knots≈1.85 km/h換算取整后,存入變量 speed,再將該值發送到數碼管B組顯示。最后比較車速與限速值的大小,如果車速超過當前限速值,則調用超速處理子程序。
3.3 氣象數據接收及限速值設定
車載限速裝置的一個主要功能是接收自動氣象站的實時監測氣象數據,經分析計算后得到當前天氣條件下的合理限速值,從而及時應對大霧沙塵、強降雨和持續高溫等局部突發性惡劣天氣造成的不利影響。自動氣象站將采集到的能見度(以可視距離表示)、溫度、降雨量等氣象信息按規定的數據格式進行封裝,然后傳遞給CC1100向廣播地址發送。攜帶了車載限速裝置的車輛在經過該廣播覆蓋的路段時,都可以接收到自動氣象站發出的信息。
自動氣象站發出的消息內容定義為:
$HMM;<Num>;<VR>;<Temp>;<RpD>;<CR>。氣象數據消息以$HMM字符串開頭,表示其后為有效的氣象信息,字符串字段之間以“;”分隔。各字段的定義如下。
①Num為自動氣象站統一編號,數值范圍為0~999。
②VR(visual range)為可視距離,表示范圍為0~999 m,分為5個等級:A(>500)、B(200~500)、C(100~200)、D(50~100)和E(0~50)。
③RpD(rainfall per day)為日降雨量,表示范圍為0~99 mm,分為Normal(0~25)和Heavy(>25)兩個等級。
④ Temp為環境溫度,數值范圍為0~99,對應實際溫度為-20~+79℃,分為Cold(0~30)、Normal(30~70)和Hot(70~99)三個等級。
⑤ <CR>為回車符,標志著一條消息的結束。
氣象站和車載裝置均按照此定義對氣象信息進行封裝和解析。車載裝置在接收到氣象消息后,首先在 Addr-list中查找消息中的 Num。如存在該Num,則拋棄這條氣象信息,避免重復接收同一氣象站信息;如果沒有該Num,則繼續后續的分析處理。車載限速裝置解析數據后,映射相應的限速規則并調整當前限速值,將新得到的限速值存入Limit中。最后更新數碼管A組顯示,通過聲音和燈光的方式提醒駕駛員限速值已修改。限速調整子程序流程如圖7所示。
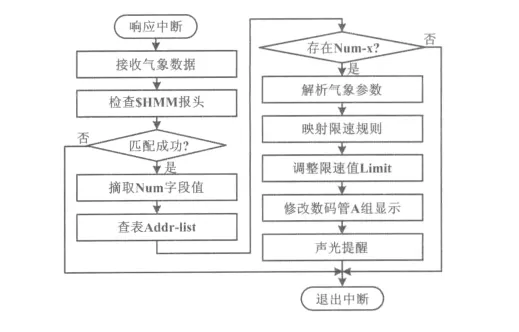
圖7 限速調整程序流程圖Fig.7 Flowchart of GPS data analyzing program
限速規則的設定綜合考慮了天氣條件對車輛性能、路面狀態、駕駛員心理等多方面的影響,并結合司乘人員及交通管部門理經驗,同時參考了《道路交通安全法實施條例》的相關規定[4-5]。對于道路氣象條件與安全車速的關系問題,陳勇[6]、程國柱[7]、王超[8]和王喆[9-10]等人作了深入的研究。本文設計的車載裝置所執行的限速規則主要包含以下10條。
①If(VR is E)then(Limit is 20);
②If(VR is D)and(Temp is Cold)then(Limit is 20);
③If(VR is D)and(RpD is Normal)and(Temp is Normal)then(Limit is 40);
④If(VR is C)and(RpD is Heavy)then(Limit is 40);
⑤If(VR is C)and(Temp is Cold)then(Limit is 40);
⑥If(VR is C)and(RpD is Normal)and(Temp is Normal)then(Limit is 60);
⑦If(VR is B)and(RpD is Heavy)then(Limit is 80);
⑧If(VR is B)and(RpD is Normal)then(Limit is 100);
⑨If(VR is A)and(Temp is Hot)then(Limit is 100);
⑩If(VR is A)and(Temp is Normal)then(Limit is120)。
3.4 告警提示程序
限速裝置將GPS所測得的實時車速與調整后的當前限速值進行比較,首先計算限速差值ΔV=VLVt,其中,VL為當前限速值,Vt為GPS模塊實測的車輛行駛速度;然后根據ΔV大小作出相應響應。告警操作表如表1所示。
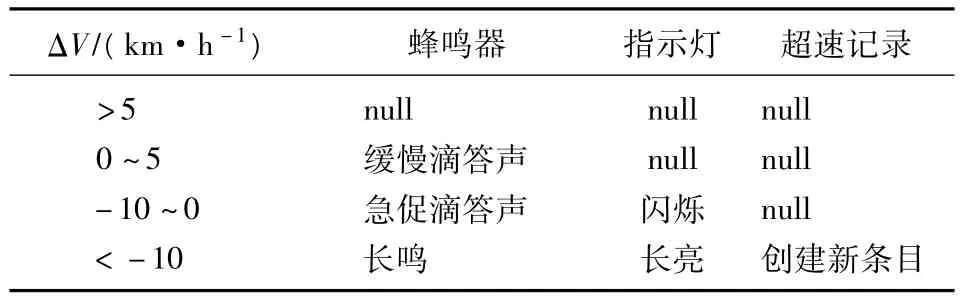
表1 告警操作表Tab.1 Alarming operations
車載裝置通過蜂鳴器和指示燈階段性的聲光變化,提醒駕駛員及時調整車速,以保障行車安全。超速記錄的每一條目包含的信息有:條目順序編號、時間、實測車速、當前限速值、實測GPS坐標信息、持續時長以及Addr-list中最新的Num。根據超速記錄條目,即可確定每次超速行為發生時車輛的行駛速度和位置信息,以及限速值及其來源(地址表中最新Num所代表的自動氣象站)。通過記錄持續時長,既可以對超速行為的惡劣程度進行定量分析,又可避免一次超速多次記錄占用太多儲存空間的問題。超速記錄條目包含了交通管理部門對超速行為進行核查及處罰所需的必要信息。
3.5 工作站信息交互
當車輛駛入高速公路入口站時,工作人員將車牌號、車輛類型、駕駛員證件、駛入時刻入口站編號以及初始限速值等基本信息錄入到車載限速裝置中,同時可以根據實際情況,通過寫入命令字控制限速裝置關閉變限速功能,從而全程執行初始的限速標準。信息錄入成功后,隨即開啟GPS測速模塊和相關程序,將限速裝置交給駕駛員隨車運行。
當車輛到達出口站時,駕駛員將限速裝置交給工作人員,工作站PC首先從車載裝置中讀取入口工作站編錄的基本信息并計算行車里程,如果存在違章記錄,則根據記錄的內容對違章行為采取相應的處罰措施;然后復位車載限速裝置設置,清除記錄信息、斷電關機;最后整理信息,統一編排之后錄入高速公路管理信息系統。
4 結束語
本文所設計的車載式自適應限速裝置,可根據各路段的實時氣象信息,自動設定與行車環境相適應的限速值,從而保障高速公路全天候的行車安全、提高通行效率。該裝置是對現有道路氣象信息系統功能的拓展,是實施高速公路變限速管理的有效工具。針對惡劣天氣的不利影響,應用該裝置組建高速公路可變限速管理系統,可彌補現有管理辦法尺度過大、反應滯后等不足,從而促進高速公路管理向智能化、精細化發展。
[1]馮民學.高速公路交通氣象智能化監測預警系統研究[D].南京:南京信息工程大學,2005.
[2]李鋒,劉清君,桑套剛.高速公路合理限速對策研究[J].道路交通與安全,2008(1):45 -48.
[3]雋志才,姚宏偉,朱泰英,等.高速公路可變限速系統的社會經濟影響評價[J].公路交通科技,2004(5):104 -108.
[4]鐘小明,張世文,賈嘉,等.速度管理技術研究[J].中國公路學報,2010(S1):99 -104.
[5]王曉楠,楊少偉,慕慧,等.山區高速公路合理限速分段研究[J].中外公路,2010(4):309 -312.
[6]陳勇.不良氣候條件下道路交通安全事故預防系統研究[D].重慶:重慶大學,2007.
[7]程國柱.高速道路車速限制方法研究[D].哈爾濱:哈爾濱工業大學,2007.
[8]王超,許洪國,劉兆惠.降雨環境下交通安全影響因素貢獻度研究[J].長春理工大學學報:自然科學版,2011(1):88 -91.
[9]王喆.高速公路災害性天氣研究[J].交通標準化,2007(1):104-107.
[10]魏軍丞,劉波峰,吳峰毅,等.無線傳輸的便攜式氣象裝置[J].中國裝置器裝置表,2007(3):48-50.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中華手工(2017年2期)2017-06-06 23:00:31
中國交通信息化(2016年9期)2016-06-06 07:42:10
電子設計工程(2015年15期)2015-02-27 12:07:30
中外會展(2014年4期)2014-11-27 07:46:46
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
祝您健康(1987年3期)1987-12-30 09:52:32
