基于方位走向的潛艇亮點分布特征提取與仿真
2012-09-19 02:04:14苑秉成
水下無人系統學報 2012年6期
關鍵詞:特征提取
徐 瑜, 趙 軍, 苑秉成
?
基于方位走向的潛艇亮點分布特征提取與仿真
徐 瑜, 趙 軍, 苑秉成
(海軍工程大學兵器工程系, 湖北武漢, 430033)
針對傳統的潛艇目標回波亮點特征提取方法, 只計算有限個峰值點處的方位值來分析目標亮點特征, 存在魯棒性較差的不足, 本文基于目標回波與背景干擾相比幅值較大, 子回波所體現的方位/距離信息相近等特征, 同時結合雙通道短時互譜法, 提出了一種基于方位走向的潛艇目標回波亮點特征提取方法。首先, 采用雙通道短時互譜法提取目標回波方位走向特征。然后, 通過采用能量判決和利用子回波方位/距離信息, 對子回波序列進行分類, 從而得到潛艇目標回波亮點的空間分布特征。經仿真驗證, 該方法與傳統方法相比具有更好的魯棒性。本文的研究結果可為分析潛艇目標聲學特性與水聲對抗提供參考。
分裂波束; 亮點; 尺度識別; 互譜; 目標方位
0 引言
現代魚雷自導與引信的發展方向是智能化及高精度化, 主要體現在: 1) 在遠距離上(≥1 km)發現目標; 2) 在中距離上(300~1000m)識別真假目標; 3) 在近距離上(≤300m)識別目標的要害部位。
智能魚雷識別目標和攻擊目標要害部位時, 恰處在目標的近場區。識別目標需要目標整體近場回波特性, 識別目標的要害部位需要從目標近場回波中提取要害部位參數。對目標的尺度信息獲取是建立在目標反射回波亮點結構基礎上的。目前魚雷的目標識別基本上為模式識別, 即目標的尺度識別和亮點識別。
方位走向法是一種常用的潛艇目標尺度識別方法。主動聲納的目標回波是潛艇目標上的多個散射亮點回波的合成, 在一定舷角觀測時, 觀察到的方位表現出隨時間的有序分布。
在分裂波束體制下, 可利用分裂波束二通道互譜方法估計目標的短時方位, 從而得到目標的方位走向向量, 估計目標空間視在角度擴展量。但采用分裂波束的方法, 單個亮點回波被分割成了多個子回波, 因此, 單從方位走向特征上很難提取具體的亮點特征信息, 必須作進一步的處理。對于分裂波束定向系統, 當發射信號形式為線性調頻(linear frequency modu- lation, LFM)時, 目前一種通用的做法是對兩通道信號做副本相關處理, 進而在相關峰點處提取目標回波方位信息。但該方法涉及到峰值點搜索, 因此算法實現起來較為復雜, 且忽略了大量弱亮點回波和亮點背景等有益信息。
基于此, 本文重點研究了采用雙通道短時互譜法估計進行目標回波方位走向特征提取, 在此基礎上研究對子回波序列進行分類的方法, 進一步提取目標回波亮點的空間分布特征。
1 分裂波束互譜法定向原理
采用分裂波束定向, 一是可增加陣元間距, 從而提高對時延的估計精度, 二是可提高輸入信噪比。均勻線列陣的分裂波束系統示意圖見圖1。圖中,為信號的入射角, 由第1至個陣元輸出求和后得到左波束輸出, 由第+1至2個陣元輸出求和后得右波束輸出。把和看作是2個假想基元的輸出, 2個假想基元的位置稱之為等效聲學中心。目的是要計算2個等效聲學中心的相對時延和信號入射角的關系。
互譜法主要用于分裂波束系統的精確方位估計, 最初由Allan G Piersol提出, 一般的主動聲納情況下多用于窄帶信號處理。其基本原理是利用接收基陣的分裂波束對目標回波及干擾進行空間采樣, 由采樣得到的雙通道數據中提取短時相位差,并由此對目標方位走向進行估計, 根據目標的視在張角估計量進行檢測和識別目標。

圖1 線列陣的分裂波束示意圖

(2)

(4)

對于數字系統, 其輸入時離散的時間序列, 可用快速傅立葉轉換(fast Fourier transform, FFT) 算法完成兩路信號的互功率譜, 估計時延并求出其方位。要對像潛艇一類的體目標反射回波信號取得一系列子回波的方位, 其具體實現方法就是對目標回波的時域信號進行分割。將目標回波和采樣后, 得到離散采樣時間序列和, 并將其分成段, 每段長為, 則有序列
(6)
式中:表示段序號;表示在第段中的第個采樣點。對每段進行FFT變換

式中:=0, 1, 2,…,-1,表示頻率序號。其互譜為
(8)
從而得到各條譜線所包含的時延信息
(10)

2 潛艇目標回波亮點空間分布特征提取
在魚雷自導頻率下, 潛艇目標的回波可看作若干個等效散射中心(亮點)發出的回波, 在采用短時分裂波束互譜法分析目標回波方位走向過程中, 單個亮點回波被分割為多個子回波段, 因此有必要對子回波段進行分類判決以進一步得出潛艇目標回波強亮點的空間分布。
對于來自同一個強亮點回波的子回波段而言, 具備以下2個較為明顯的特征: 目標回波與背景干擾相比幅值較大; 子回波所體現的方位/距離信息相近。這里采用以下步驟對潛艇目標回波強亮點的空間分布特征進行提取。
2.1 能量判決
能量積分處理一般采用滑動平均的方法, 其目的是為了平滑信號能量, 防止起伏, 以便有利于檢測。設積分長度為, 信號為(), 其中=1, 2,…,, 積分過程如下

由于來自強亮點的子回波序列通常能量較大, 因此可以通過設置一定的閾值對子回波序列進行初步判決, 大于閾值的歸為來自于強亮點回波的子回波, 小于閾值的則歸于弱亮點及亮點背景。
2.2 子回波序列分類與亮點特征提取
對于來自同一個強亮點回波的子回波而言, 子回波所體現的方位/距離信息接近。假設經過能量判決后的子回波序列的方位值為,為子回波序列號。子回波的序列號, 對應了子回波的距離信息。因此, 對于能量判決后的子回波序列首先按照序列號以(為發射脈沖寬度, floor為取整,為子回波中的樣本數)為間隔進行初次分類, 假設分類后的結果為(,為類的數量), 則可求取每一類子回波序列的平均方位值, 記為。
定義樣本距離
3 數值計算與仿真
3.1 潛艇目標幾何建模
為方便計算, 本文以標準潛艇模型(BeTSSi-Sub) 為主要研究對象。該模型將潛艇目標模擬為幾個簡單形狀目標的組合, 用半橢球體來模擬艇艏, 圓柱體模擬艇體, 艇艉為圓錐體, 指揮臺圍殼前半部為半橢圓體, 后半部為錐體, 水平艉舵與垂直艉舵端面均為前半部半橢圓體, 后半部錐體。具體參數如下: 艇全長62 m, 艇體直徑7.5 m, 前端半橢球體的長度為7m, 中段圓柱體的長度為44.6 m, 后端錐體的長度為11.4 m。艦橋中心距艇艏頂點22.85 m處, 前端半橢球體長半軸為3.85 m, 短半軸為2.2 m。在實際建模時, 先借助AutoCAD軟件對目標進行幾何建模, 然后再將數據導入Ansys軟件進行網格劃分。圖2給出了AutoCAD建模后的結果, 并根據聲納系統與目標之間的相對位置關系, 建立了直角坐標系。
3.2 仿真結果與分析
以標準潛艇目標模型為研究對象, 采用板塊元方法進行目標回波預報, 仿真不同入射角情況下各通道回波數據, 根據各通道仿真回波采用互譜法分析目標回波方位走向特征, 同時針對目標回波亮點分布進行分析。
仿真參數設置: 發射信號為矩形包絡的LFM波, 中心頻率為25 kHz, 帶寬為1 K, 脈沖寬度為10 ms, 周期為2 s, 采樣率, 聲速, 信噪比SNR=10 dB, 聲納基陣形式為6元水平線陣, 陣元間隔為中心頻率的半波長, 聲納系統距目標中心的距離為500 m。
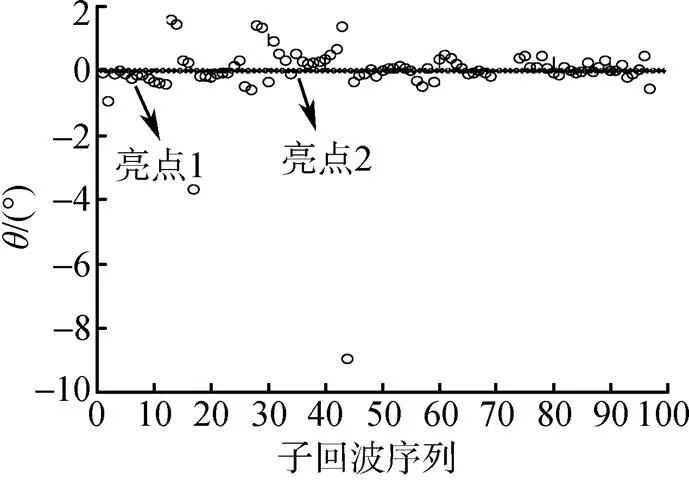
圖3(a)和(c)分別是入射角(基陣法線與目標航向的夾角)為0°和60°時目標回波方位走向仿真結果, 最佳檢測時間區間分別為: 635~720 ms和650~700 ms, 每段子回波樣本數為500。同時在仿真過程中對每一段子回波進行能量檢測, 得到了子回波序列的能量分布圖。
(a) 入射角為0°方位走向
(b) 入射角為0°子回波序列能量分布

(c) 入射角為60°方位走向
(d) 入射角為60°子回波序列能量分布
圖3 標準潛艇目標回波方位走向仿真結果
Fig. 3 Simulation results of azimuth trend of BeTSSi-Sub model
基于亮點出現的距離和角度來看, 可以判斷對應的分別是艇艏、指揮臺圍殼和艇艉; 目標亮點之間的相對位置呈現出一定的斜率, 反映出換能器基陣法線與目標軸線的夾角姿態特性; 從子回波能量分布圖可以看出, 艇艉亮點的局部目標強度較大, 相對應的亮點回波幅度也較大。
4 結束語
目前, 魚雷自導系統常用的目標方位估計方法多采用基于常規波束的多波束技術和基于分裂波束系統的互譜法定位技術, 多陣元分裂波束的互譜測向法是等效二元陣最大似然測向系統的次最佳實現, 具有結構簡單, 運算量小, 定向精度高等優點, 適用于對目標的高精度定位。本文重點研究了采用雙通道短時互譜法估計進行目標回波方位走向特征提取, 然后在此基礎之上研究對子回波序列進行分類的方法, 進一步提取目標回波亮點的空間分布特征。本文的研究對于分析潛艇目標的聲學特性以及水聲對抗具有一定的應用價值。
[1] 易紅, 周殿寶, 陳春玉. 聲自導魚雷進行尺度目標識別的試驗方法研究[J]. 魚雷技術, 2005, 13(4): 50-53.
Yi Hong, Zhou Dian-bao, Chen Chun-yu. A Test Method for Scaling Target Recognition of Acoustic Homing Torpedo[J]. Torpedo Technology, 2005, 13(4): 50-53.
[2] 湯渭霖. 聲納目標回波的亮點模型[J]. 聲學學報, 1994, 19(2): 92-100.
Tang Wei-lin. Highlight Model of Echoes from Sonar Targets[J].Acta Acustica, 1994, 19(2): 92-100.
[3] 劉朝暉, 付戰平, 王明洲. 基于方位走向法和互譜法的水中目標識別[J]. 兵工學報, 2006, 27(5): 932-935.
Liu Zhao-hui, Fu Zhan-ping, Wang Ming-zhou. Under- water Target Identification Based on the Methods of Bearing and Cross-spectrum[J]. Acta ArmamentarII, 2006, 27(5): 932-935.
[4] 石勇, 石敏, 蔣興舟, 等. 基于方位走向識別目標尺度的仿真與特性分析[J]. 魚雷技術, 2003, 11(1): 27-30.Shi Yong, Shi Min, Jiang Xing-zhou, et al. Simulation and Characteristics Analysis of Target Scale Recognition Based on Azimuth Trend[J]. Torpedo Technology, 2003, 11(1): 27-30.
[5] 王明洲, 郝重陽, 黃曉文. 基于相關法方位分析的水下主動目標尺度識別研究[J]. 西北工業大學學報, 2003, 21(3): 317-320.
Wang Ming-zhou, Hao Chong-yang, Huang Xiao-wen. On Underwater Target Dimension Recognition Based on Bearing Analysis of Signal Correlation Feature[J]. Journal of North- western Polytechnical University, 2003, 21(3): 317-320.
[6] 卜考英. 水下目標回波特性預報模型驗證研究[D]. 上海: 上海交通大學, 2006.
Bo Kao-ying. Validation Research on the Echo Characteristics Prediction Model of Underwater Target[D]. Shang Hai: Shang Hai Jiao Tong University, 2006.
[7] 范軍, 湯渭霖. 聲納目標強度(TS)計算的板塊元方法[J]. 聲學技術, 1999, 33(增刊):31-32.
Fan Jun, Tang Wei-lin. The Planar Element Method for Computing Target Strength(TS) of Sonar[J]. Technical Acoustic, 1999, 33(z): 31-32.
[8] 劉成元, 張明敏, 程廣利. 一種改進的板塊元目標回聲計算方法[J]. 海軍工程大學學報, 2008, 20(1): 25-31.
Liu Cheng-yuan, Zhang Ming-min, Cheng Guang-li. Improved Planar Element Method for Computing Target Echo[J]. Journal of Naval University of Engineering, 2008, 20(1): 25-31.
(責任編輯: 楊力軍)
Distribution Feature Extraction and Simulation of Submarine Echo Highlights Based on Target Azimuth Trend
XU Yu, ZHAO Jun, YUAN Bing-cheng
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
Due to the feature extraction method of conventional submarine echo highlight calculates only the azimuth on limited peak points to analyze the target highlight feature, and the robustness is poor. This paper proposes a distribution feature extraction method of submarine echo highlights based on target azimuth trend, by mainly using the characteristics that the amplitude of target echo signal is larger than that of noise and the sub-echo signals from the same strong highlight signal embody approximate azimuth and distance information, and combining with the technique of double-channel short-time cross-spectrum. Firstly, the feature of target azimuth trend is obtained with the technique of double-channel short-time cross-spectrum. Secondly, the sub-echo signal series is classified by mainly using energy decision and the sub-echo signals′ azimuth and distance information, and then the spatial distribution feature of submarine echo highlights is achieved. Simulation results show that the proposed method is more robust than the conventional method. This study may provide a reference for analysis of submarine acoustic characteristics and acoustic countermeasure system.
split beam; highlight; scale identification; cross-spectrum; target azimuth
TJ630.34; TN911
A
1673-1948(2012)06-0419-05
2012-03-11;
2012-04-26.
國家自然科學基金項目資助(61074191).
徐瑜(1983-), 男, 博士, 研究方向為軍用目標特性與制導技術.
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49
