魚雷引信全電子安全系統保險與解除保險邏輯設計
2012-09-19 02:11:00甘雨
水下無人系統學報 2012年6期
甘 雨
?
魚雷引信全電子安全系統保險與解除保險邏輯設計
甘 雨
(中國船舶重工集團公司第705研究所昆明分部, 云南昆明, 650118)
基于解除保險環境激勵的特性和識別方式, 選擇魚雷初始彈道水壓信息、安全距離信息和目標信息作為解除保險環境激勵, 設計了一種能夠切合魚雷彈道特性的保險與解除保險邏輯, 既實現了解除保險環境激勵同保險與解除保險邏輯之間的良好匹配, 又能保證魚雷全彈道的安全性。運用馬爾科夫理論, 對所設計的保險和解除保險邏輯進行了分析, 計算得到的安全性指標遠大于GJB373A對引信安全系統的要求, 能夠滿足魚雷引信高安全性的設計要求。
魚雷引信; 全電子安全系統; 保險與解除保險; 邏輯設計; 安全性
0 引言
引信全電子安全系統是集高能起爆技術與微電子技術于一體的高新技術, 從根本上改變了引信的隔離設計思想, 通過環境識別后控制發火電容上電和起爆電路的接通, 具有安全性強、可靠性高、作用迅速等優點, 而引起世界各國的高度重視。全電子安全系統固有的優點使得其可以充分利用武器的發射環境信息、彈道環境信息、目標及目標區環境信息, 實現信息化、靈巧化和智能化。本文借鑒了何光林的電子安全系統邏輯分析思想, 注重解除保險環境激勵特性和識別方式及保險與解除保險邏輯機構間的匹配性。根據魚雷彈道的可信環境, 選擇安全、可靠和具備唯一性的環境信息作為解除保險環境激勵, 以所選擇的解除保險環境激勵的特性和識別方式為基礎, 設計一種能夠保證全彈道安全性的魚雷引信全電子安全系統保險與解除保險邏輯, 可使解除保險環境激勵同保險與解除保險邏輯之間實現良好的匹配。
1 保險機構設計
從引信的起爆(點火)功能考慮, 引信作為控制戰斗部起爆能量產生的裝置存在, 實現對引信中能量流的抑制, 就可很大程度上提高引信安全性。抑制起爆能量流是實現全電子安全系統的最主要手段, 包括對起爆控制系統發火能量的抑制和對爆炸序列能量傳遞通道的隔斷(隔爆)。對直列式傳爆序列來說, 最主要手段是對起爆控制系統發火能量的抑制。提高引信固有安全性的主要途徑有增加獨立保險件的個數、巧妙地設計安全系統的邏輯、實現引信全電子安全系統高安全性和高可靠性。其中, 采用3個保險件最為合理。
為保證發射艦艇及后續彈道的安全性, 魚雷引信全電子安全系統的安全性設計應考慮發射基、安全距離及目標基的安全性。結合國內外全電子安全系統的設計特點, 設置3級電子保險件(2級靜態開關、1級動態開關)對起爆電源進行隔離。魚雷引信全電子安全系統原理模型見圖1。
圖1 全電子安全系統原理模型
圖中, 該模型主要由2片專用集成電路(appli- cation specific integrated circuit, ASIC)及外圍電路組成, 完成對解除保險環境信息的識別, 并輸出相應的信號和指令, 控制3級保險開關(2級靜態保險開關、1級動態保險開關)解除保險的時序, 并可靠解除保險, 驅動發火組件充電至發火水平并維持, 具備待爆條件。靜態開關Ⅰ設置為第1級保險, 具備靜態電保險特征, 對起爆電源的正極進行安全性隔斷, 其解除保險激勵信號來自魚雷發射環境中不可逆、具備唯一性、標識魚雷發射的激勵信號, 保證在魚雷發射出管后才啟動全電子安全系統的保險與解除保險流程。靜態開關Ⅱ設置為第2級保險, 具備靜態電保險特征, 對起爆電源地進行安全性隔斷, 其解除保險激勵信號來自魚雷安全距離環境信息, 保證魚雷在安全距離內的安全性。動態開關設置為第3級保險, 具備動態電保險特征, 其解除保險激勵信號來自目標環境信息, 保證魚雷在安全距離之后的安全性。很大程度上, 正因為設置了由目標環境信息驅動解除保險的第3級保險, 具備目標基安全系統特征, 才能保證魚雷全彈道的安全性。
2 解除保險環境激勵選擇
對于保險與解除保險裝置的復雜性和造價以及安全性水平, 解除保險環境的選擇和確定通常是決定性因素,通常保險與解除保險裝置的設計隨著解除保險環境的唯一性而改變。故魚雷引信全電子安全系統的設計中一個重要的步驟就在于, 如何在其工作周期內經受的可信環境之中, 選擇安全、可靠并具備唯一性的解除保險環境激勵信號, 對其進行識別和判斷, 驅動安全系統解除保險。解除保險環境激勵的選擇應貫徹“獨特性、時序性、互質性、通用性、窗口特征”的原則, 提高安全系統的安全性和抗干擾性。
1) 第1級保險解除激勵——魚雷初始彈道水壓信息。該信息伴隨魚雷發射入水而產生, 對應不同的水深產生不同水壓, 是魚雷入水深度的識別信息。魚雷從入水到預定搜索深度的過程包括俯仰抑制、按一定角度下潛和拉平3個階段,此階段的水壓信息特征明顯, 時間特性滿足0≤≤t≤要求(其中:t為第1級保險解除時刻;為魚雷發射入水時刻;為魚雷到達預定搜索深度時刻)。水壓信息是魚雷引信安全系統中利用率最高的一種環境信息, 不僅具有典型的魚雷彈道環境特點, 而且便于識別, 通用性很強。魚雷初始彈道水壓信息的識別可通過采用壓力傳感器, 在時間~內對魚雷初始彈道水壓信息進行識別, 若此時水壓大于設定值(視魚雷作戰使用要求而定), 則認為魚雷已發射入水, 并完成了不可逆的發射動作。將此信息輸入到安全系統保險機構的邏輯控制電路中, 驅動第1級保險解除, 實現水壓信息解除第1級保險的功能。
2) 第2級保險解除激勵——安全距離信息。該信息在魚雷到達預設定的安全距離后產生, 時間特性滿足≤t≤(其中:t為第2級保險解除時刻;為魚雷到達安全距離的最小管制時間, 滿足;為魚雷到達預設定安全距離時刻, 滿足;為預設定的安全距離;為魚雷最大航行速度;為魚雷最小航行速度)。該信息是魚雷引信安全系統中利用率較高的一種環境信息, 距離特性和時間特性均較明顯, 具有典型魚雷彈道環境特點, 通用性較強。螺旋槳轉動信息是不可逆的, 可通過魚雷螺旋槳的轉動圈數計算魚雷航行距離, 且尾軸轉速與航程間的聯系較合理, 作為安全距離信息較準確和可靠。因此, 螺旋槳轉動信息能很好地實現定距, 可通過脈沖計數電路對螺旋槳的轉動次數進行統計, 當脈沖計數值達到規定值時, 向安全系統保險機構的邏輯控制電路輸出安全距離信息, 驅動第2級保險解除, 實現安全距離信息解除第2級保險的功能。
3) 第3級保險解除激勵——目標信息。目標信息主要是自導系統獲得目標參數并進行處理后向全電子安全系統發出的控制指令, 時間特性應滿足≤t≤要求。其中:t為第3級保險解除時刻;為魚雷自導開機時刻;為魚雷自身攻擊目標性能限制下第3級保險解除的最大允許時刻, 且
利用目標信息, 引信可實現目標信息解除保險的安全設計模式, 為通用的環境信息。式(1)表達了利用目標信息解除第3級保險, 實現目標基安全系統的充要條件。為獲取準確的目標信息, 完成目標基安全系統解除保險系統的要求, 設計中須充分考慮自導系統和非觸發引信的目標探測性能, 提高魚雷自導系統與引信安全系統的匹配性, 盡可能減少自導系統及引信安全系統完成目標信息處理的時間及高壓發火電容的充電時間。
3 保險與解除保險邏輯設計
保險與解除保險邏輯是全電子安全系統的控制中樞, 根據自身的工作狀態和識別的解除保險環境激勵, 有序地控制著安全系統從初始安全系統逐漸過渡到待發狀態。因此, 保險與解除保險邏輯的設計是全電子安全系統安全性設計的根本所在。保險與解除保險邏輯的設計主要從時間特性、時序邏輯、窗口特性等方面展開。以上述所選擇3種信息作為3個解除保險環境激勵, 它們彼此獨立, 具備互質性, 在時間上有良好的時序特性。此外, 初始彈道水壓信息和安全距離信息均具有良好的窗口特性。故保險與解除保險邏輯采用的控制模式為: 初始彈道水壓信息、安全距離信息和目標信息順序作用, 依次解除第1級~第3級保險, 其中初始彈道水壓信息和安全距離信息增加時間窗識別機構。
采用此控制模式的全電子安全系統保險與解除保險邏輯如圖2所示。圖中, 魚雷初始彈道水壓信息在時間窗內出現則解除第1級保險; 安全距離信息在第1級保險解除后出現, 并且在時間窗內出現則解除第2級保險; 目標信息在第2級保險解除后出現則解除第3級保險, 使安全系統達到待發狀態。
圖2 全電子安全系統保險與解除保險邏輯
保險與解除保險邏輯時序特性如圖3所示。具體工作時序為: 1) 以魚雷發射時刻作為全電子安全系統解除保險過程的時間零點; 2) 在至之間(時間窗內)出現初始彈道水壓信息則視為正常, 解除第1級保險; 3) 在第1級保險正常解除的前提下, 在至之間(時間窗內)出現安全距離信息則視為正常, 解除第2級保險; 4) 在第2級保險正常解除的前提下, 出現目標信息則視為正常, 解除第3級保險, 當高壓發火電容的電能達到發火能量要求時, 全電子安全系統處于待發狀態; 5) 在全電子安全系統處于待發狀態后, 起爆信號出現則視為正常, 全電子安全系統發火, 引爆沖擊片雷管; 6) 在時間之后, 全電子安全系統進入絕火狀態, 禁止解除保險和發火等操作; 7) 當初始彈道水壓信息、安全距離信息、目標信息及起爆信號出現的時序未符合圖3所示的邏輯時序要求時, 則全電子安全系統進入故障保險狀態, 禁止解除保險和發火等操作。
圖3 保險與解除保險邏輯時序特性
4 保險與解除保險邏輯分析
在引信安全系統安全性的分析理論研究方面, 施坤林提出了馬爾可夫理論在引信安全系統分析中的應用。利用隨機過程的Markov理論, 計算圖2所示的全電子安全系統保險與解除保險邏輯在帶電檢測過程或上電后發射前意外解除保險的概率, 并將這一時間歷程分為個時間間隔。
假設: 1) 在每個時間間隔中, 解除保險環境激勵出現的概率相同, 其概率為p,=1, 2, 3, …; 2) 環境激勵應符合以下假設: 獨立性——在2個不相重疊的區間[,]和[,]中出現的激勵次數互相獨立; 齊次性——在區間[,]內出現的次數只與區間大小~有關, 而與起點無關; 普通性——在充分小的時間間隔內, 最多只出現一次激勵; 3) 所有零部件都正常工作; 4) 在~t期間, 系統的狀態轉移概率為,,=1, 2, 3, …; 5) λ的定義: λ=Δ/,是所分區間的大小, Δ是某環境激勵的作用時間, 一般取Δ≤0.01T。
圖2所示的全電子安全系統保險與解除保險狀態定義: ①保險狀態, 第1級、第2級和第3級保險均處于保險狀態; ② 第1級保險解除狀態, 第2級和第3級保險仍處于保險狀態; ③ 第1級和第2級保險均處于解除狀態, 第3級保險仍處于保險狀態; ④ 待發狀態, 第1級、第2級和第3級保險均解除; ⑤ 系統處于故障保險狀態, 或第1級保險解除,打開; 或第1級保險解除,打開; 或第1級、第2級和第3級保險均處于保險狀態,打開。全電子安全系統邏輯機構狀態轉換關系見圖4。
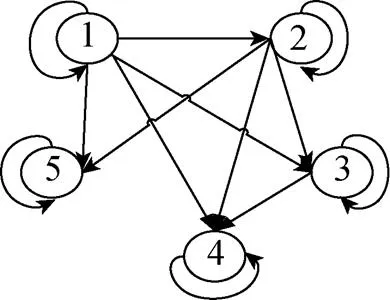
圖4 邏輯機構狀態轉換關系
狀態轉移分析:
①→③: 狀態轉移概率有以下2種情況: a) 第1級保險解除激勵在時間窗內出現和第2級保險解除激勵在時間窗內出現, 但第3級保險解除激勵未出現, 則; b) 第1級保險解除激勵在時間窗內出現和第2級保險解除激勵在時間窗內出現, 但第3級保險解除激勵在第1級保險解除激勵和第2級保險解除激勵之前出現, 則, 所以狀態轉移概率;
②→③: 狀態轉移概率有以下2種情況: a) 第2級保險解除激勵在時間窗內出現, 但第3級保險解除激勵未出現, 則;b)第2級保險解除激勵在時間窗內出現, 但第3級保險解除激勵在第2級保險解除激勵之前出現,則, 所以狀態轉移概率;
④→④: 系統處于待發狀態, 且起爆信號未出現, 則狀態轉移概率;
其余的元素均為0, 即狀態轉換圖中無連線的狀態轉移概率。
則一步轉移概率矩陣為

(4)
(5)

因此, 安全系統解除保險的概率為
(7)
5 結束語
本文所設計的魚雷引信全電子安全系統保險與解除保險邏輯充分利用魚雷的發射環境信息、彈道環境信息、目標及目標區環境信息, 實現魚雷引信全電子安全系統信息化、靈巧化、智能化, 為魚雷引信全電子安全系統的工程實現提供了一定的理論基礎。
[1] 李東杰, 何承基. 全電子引信技術及其發展[C] . 2002中國控制與決策學術年會論文集, 2002.
[2] 何光林. 引信電子安全系統解除保險邏輯分析[J]. 北京理工大學學報, 2008, 28(12): 1083-1087.He Guang-lin. Analysis on the Arming Logic of Fuze Electronic Safety and Arming[J]. Transactions of Beijing Institute of Technology, 2008, 28(12): 1083-1087.
[3] 李豪杰, 張河. 引信安全系統及其功能范疇探討[J]. 探測與控制學報, 2006, 28(3): 4-7. Li Hao-jie. Zhang He. Discussion on Fuze Safety System and Its Function Category[J]. Journal of Detection& Control, 2006, 28(3): 4-7.
[4] 黨瑞榮. 全電子直列式保險裝置[D]: 南京: 南京理工大學, 1991.
[5] 美國海軍空戰中心武器分部(NAWCWD). 安全與解除保險裝置設計原理[M]. 1999
Naval Air Warfare Center Weapon Department.Safety and Arming Device Design Principles, 1999.
[6] 尚雅玲, 李廣超, 但波, 等. 魚雷引信安全系統通用環境信息[J], 探測與控制學報, 2010, 32(4): 30-33.Shang Ya-ling, Li Guang-chao, Dan Bo, et al. General Environment Information for Torpedo Fuze Safety System[J]. Journal of Detection & Control, 2010, 32(4): 30-33.
[7] 施坤林. 馬爾可夫理論在引信安全系統分析中的應用[J]. 現代引信, 1991, 4(4): 9-20. Shi Kun-lin. Markov Theory Used in Analysis of Fuze Safe Syste[J]. Modern Fuze, 1991, 4(4): 9-20.
[8] 何光林, 李杰, 李世義. 基于三個環境信號的引信電子安全系統安全性分析[J]. 兵工學報, 2002, 23(2): 171-175.
(責任編輯: 楊力軍)
Design for Safety and Arming Logic in Torpedo Fuze of Electronic Security System
GAN Yu
(Kunming Branch of the 705 Research Institute, China Shipbuilding Industry Corporation, Kunming 650118, China)
Based on the characteristic and identification mode of arming environment excitation, water pressure data of initial trajectory, safe distance data and target information are selected as arming environment excitation, and a safety and arming logic according with the trajectory characteristic of a torpedo is designed to realize good matching of arming environment excitation and safety as well as arming logic, and to ensure the safety of torpedo overall trajectory. The safety and arming logic is analyzed by using the Markov theory, and the calculated safety value is much larger than the criterion in the standard GJB373A for fuze security system, which can satisfy high safety design need for torpedo fuze.
torpedo fuze; electronic security system; safety and arming; logic design; safety
TJ431.7
A
1673-1948(2012)06-0467-05
2012-05-30;
2012-07-04.
甘 雨(1983-), 男, 工程師, 主要研究方向為魚雷戰斗部安全與起爆技術.
猜你喜歡
現代儀器與醫療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
中華手工(2017年2期)2017-06-06 23:00:31
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
電子設計工程(2015年12期)2015-02-27 12:06:24
中外會展(2014年4期)2014-11-27 07:46:46
