跨介質UAV水面滑跳轉向特性建模與仿真
2012-09-19 02:04:02李金洪楊安強粟凌云
水下無人系統學報 2012年6期
李金洪, 楊安強, 粟凌云
?
跨介質UAV水面滑跳轉向特性建模與仿真
李金洪, 楊安強, 粟凌云
(昆明船舶設備研究試驗中心, 云南昆明, 650051)
跨介質無人駕駛飛行器(UAV)飛行處于近水面, 無法采用常規UAV的氣動舵面提供轉向力, 導致轉向困難, 機動性較差。基于空氣動力學、經典勢流理論和二元平面滑行理論, 提出了UAV水面滑跳轉向方法, 建立了跨介質UAV滑跳轉向飛行動力學模型, 并進行了仿真計算, 重點研究了跨介質UAV滑跳轉向特性及其影響因素, 給出了抑制UAV橫滾的解決措施。仿真結果表明, 跨介質UAV入水角和固定舵角在滑跳轉向過程中對自身姿態及其彈道形態均有較大影響。該結果可以為跨介質UAV提供方案總體設計、彈道規劃、可靠性設計和控制系統設計理論依據和計算方法。
無人駕駛飛行器; 跨介質; 滑跳彈道; 轉向特性; 仿真
0 引言
跨介質無人駕駛飛行器(unmanned aerial vehicle, UAV)是近年來新提出并重點研制的一種新概念多相飛行器。根據概念設計, 它融合了高速滑行艇、水上飛機和特種UAV的多重特點, 具有海空兩棲特性, 能夠在高海況條件下實現水面待機、水上高速滑行、水面起降、近水面滑跳機動飛行等多種狀態。跨介質UAV較巡航導彈具有高機動性、多用途和復雜環境的高適應性, 面對現代高強度反導系統具有極大的突防能力。其巨大的軍事用途逐漸為各主要軍事大國所重視。
跨介質UAV在其特殊的機動滑跳彈道飛行過程中, 滑水機動轉向由于其較高的隱蔽性和高海況下的可操作性, 可以有效躲避掠海雷達的探測, 具有良好的反偵測機動特征。但轉向過程中, 受空氣動力/水動力的復合影響, 力學狀態復雜, 特別是UAV偏航過程中可能出現的姿態瞬時突變, 對整個滑跳機動彈道會產生巨大影響。鑒于運動特性比較復雜且課題比較新, 國內外對滑水轉向特性研究均無成熟理論, 本文力圖建立跨介質UAV滑水轉向階段飛行動力學模型, 并首次提出了較為可行的滑水轉向運動, 重點針對滑水轉向特性進行分析, 同時對滑跳入水條件對滑水轉向的影響展開研究。
1 飛行動力學模型
1.1 滑水轉向運動
跨介質UAV觸水轉向較常規轉向的區別在于, 入水前在飛行器前段彈出全動轉向舵, 空中飛行時, 水舵保持0°舵角, 入水前彈出舵獲得固定舵角, 利用彈出舵所受水動力實現轉向運動。
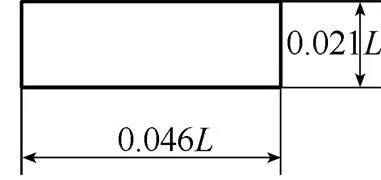
彈出舵動力模型主要指飛行器入水后彈出舵所受到的水動力特性, 主要為舵面受到的法向力F和軸向力F。彈出舵為矩形, 提供UAV轉向的主要偏航力與力矩, 其工作示意圖如圖1和圖2所示。按照慣例, 圖1中只標出位置力。

(2)
式中:S為面元面積;為沾濕面元數量。
由于彈出舵安裝位置的特點, 其法向力和軸向力均未作用于UAV質心, 因此均會產生UAV的俯仰、偏航和橫滾力矩, 需要分別計算。
對整個跨介質UAV受力進行分析可知, UAV受到氣動力與水動力的雙重作用。當航行器在空中飛行時, 升力F, 側向力F, 阻力F和3個通道的力矩為氣動力; 當航行器進行滑水作業時, 不止受到氣動力作用, 同樣受到水動力影響, 其中慣性力(附加質量力)、滑水力F(X,Y)和水舵作用力F均為水動力作用力。
(a)水舵示意圖???(b)水舵安裝位置示意圖
當UAV水舵觸水時, 水舵作用在UAV的俯仰力由X和X分別所產生的力矩之和所組成, 即
M=M+M=X·H+X·H(3)
式中: 彈出舵軸向力沿UAV軸向分量

彈出舵軸向力系數
(5)
彈出舵法向力沿UAV軸向分量

彈出舵法向力斜率
(7)
其中:為機翼展弦比;H為X到質心的縱向距離;H為X到質心的縱向距離。
水舵作用在UAV上的偏航力矩由彈出舵法向力和軸向力沿UAV法向分量分別所產生的力矩之和所組成, 即
M=M+M=Z·L+Z·L(8)
式中:Z為彈出舵軸向力沿UAV法向分量;Z為彈出舵法向力沿UAV法向分量;L為Z到質心的軸向距離;L為Z到質心的軸向距離。
水舵作用在UAV的橫滾力矩由彈出舵法向力和軸向力沿UAV法向分量分別所產生的力矩之和所組成, 即
M=M+M=Z·H+Z·H(9)
式中:H為Z距離質心的縱向距離;H為Z距離質心的縱向距離。
1.2 運動方程組
通過動量與動量矩定理可在彈體系建立跨介質UAV滑水轉向過程的全空間運動方程組

(11)
位置力矩的有量綱系數

氣動阻尼力的有量綱系數
(13)
氣動阻尼力矩的有量綱系數
滑水阻力、滑水動升力、滑水動升力矩和滑水阻力矩分別為
(15)
根據二元平板滑行理論, 理想流體中二元滑行平板的下半平面流通與薄翼完全相似, 但前緣產生反射流。由于滑行平板缺少薄翼上表面的負壓, 故其升力為薄翼升力的一半, 合力作用點距離前緣1/4處, 由此可得飛行器底部滑水升力系數

(17)
其中,為飛行器雷諾數。
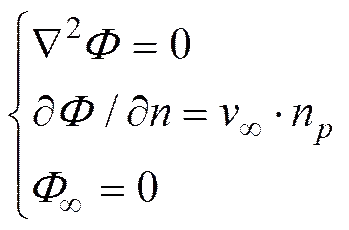
將速度勢按分量展開, 可得
(19)
由式(18)所得

(21)
這里需要指出的是, 當飛行器觸水過程中, 若速度過高, 水舵將產生自然空化現象, 因而無法保證舵的有效性。因此本文對跨介質UAV速度約束為≤0.3, 因此可以忽略空氣壓縮性對流體動力參數的影響。且如圖2所示, 由于彈出舵面積非常小, 因此在空中段飛行時氣動力在舵面作用力對UAV的影響可以通過尾部垂直舵進行修偏。
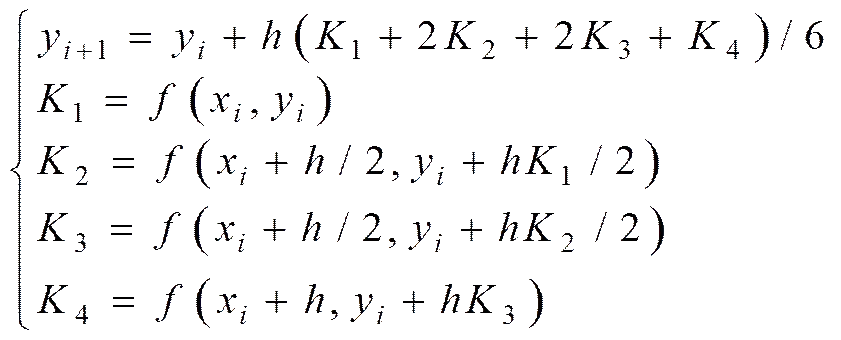
1.3 數值算法
上述偏微分方程計算無法獲得解析解, 因此需要用數值算法求解, 這里采用龍格庫塔(Runge-Kutta)數值算法對偏微分方程組求解。龍格-庫塔方法是一種在工程上應用廣泛的高精度單步算法。由于此算法精度高, 采取措施對誤差進行抑制, 所以其實現原理也較復雜。該算法構建在數學支持的基礎上, 本文采用4階龍格-庫塔公式對動力學模型進行數值求解
2 仿真計算及分析
2.1 跨介質UAV滑水轉向彈道仿真
根據上述動力學模型對跨介質UAV滑水轉向運動進行仿真計算, 圖3為轉向彈道曲線。
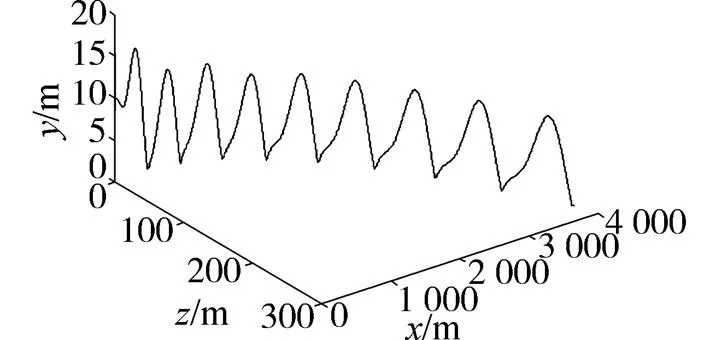
圖3 跨介質UAV滑跳轉向彈道曲線
跨介質UAV系統屬于典型多輸入多輸出線性系統, 且滑跳轉向彈道呈周期性變化趨勢。滑跳周期分為兩個狀態段: 空中段和水面段, 研究滑水轉向問題重點研究UAV的偏航和橫滾特性。觸水瞬間, 偏航角、橫滾角, 偏航角速度和橫滾角速度均出現突變; 水面段UAV處于持續轉向狀態, 偏航角和橫滾角均持續增大; 當UAV脫離水面后, 飛行器基本保持出水狀態后的直線運動, 直至下一次入水。由于滑跳時間較短, UAV入水滑水過程相似于一個6自由度的階躍擾動, 作用于舵面的水動力等同于閉環系統的脈沖激勵源, 故在入水滑水段內出現了明顯的密集振動頻率疊加區域; 空中運動段無脈沖力作用, 偏航角和偏航角速度在空中飛行段逐漸收斂, UAV處于振蕩修正過程, 且自身橫側方向的流體修正作用, 對滑跳偏航能力具有一定的影響。
2.2 入水角對UAV觸水偏轉的影響
入水角即為跨介質UAV入水瞬間UAV體系軸向與液面夾角, 不同的入水角必然對入水姿態產生巨大影響, 從而導致UAV出水轉向狀態的不同。為了對控制系統提出更高的要求, 需要研究跨介質UAV入水瞬間入水角的不同對觸水偏轉的影響效果。本文定義兩種跨介質UAV初始入水角: 1) 1.4°, 2) 3.5°。仿真結果如圖4所示, 圖中實線為工況1仿真結果, 虛線為工況2仿真結果。
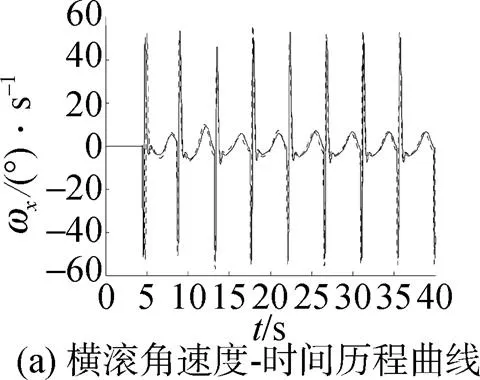
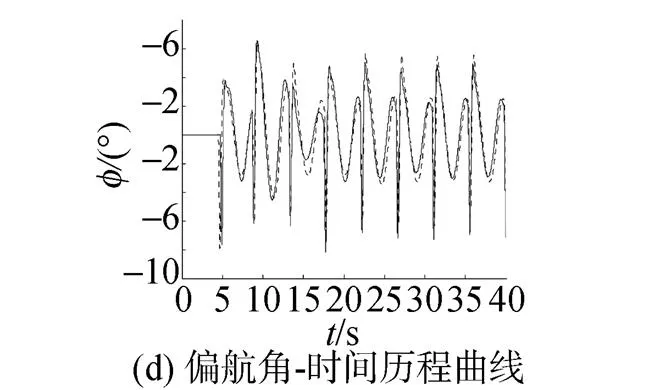
圖4 入水角對跨介質UAV偏航及其橫滾狀態的影響
圖4表現了入水角對跨介質UAV偏航及其橫滾狀態的影響。從仿真結果可知, 隨著入水角的減小, 入水瞬間,,分別由-2.3°/s, 0.3°/s, 2.2°變化到-3.6°/s, -6.3°/s, -6.6°, 一次滑跳轉向周期UAV的偏航角分別為1.8°和1.9°。
仿真結果可知, 入水角越小, 跨介質UAV側向角速度和偏航角減小, 橫滾角速度和橫滾角增大。隨著入水角的減小, 跨介質UAV入水起始角偏小, 在高速條件下導致短時間內的吃水較深, 固定舵上受到的橫滾脈沖激勵, 使UAV出現突變; 吃水深度較大也會導致UAV短時間內具有較大滑水動升力, 在動升力的作用下, UAV迅速脫離水面, 故滑水時間較短, 滑水所造成的偏航角和橫滾角改變量均較小, 且靜態振蕩幅度也明顯下降。與此同時, 減小入水角所導致的橫滾角動態響應大于偏航角, 可見橫滾通道對于入水角的變化更敏感, 受到的影響亦更大。綜上所述, 增大入水角可以有效增大偏航角, 減小橫滾角, 改善跨介質UAV可能出現的翼尖觸水所導致的危險狀態, 但滑水時間明顯增加, 特別是在高海況下可能導致UAV傾覆。
2.3 固定舵角對UAV觸水偏轉的影響
彈出舵在入水前已擁有固定舵角, 入水后不再做角度上的變化, 彈出舵固定舵角的不同, 必然導致作用于彈出舵水動力的不同, 導致飛行器觸水轉向狀態的顯著不同。為了實現觸水轉向運動的最優設計, 需要研究飛行器彈出舵舵角的不同對觸水偏轉的影響效果。本文定義兩種跨介質UAV固定舵角的工況: 1) 10°, 2) 15°。仿真結果如圖5所示, 圖中實線為工況1仿真結果, 虛線為工況2仿真結果。從仿真結果可知, 隨著入水角的減小, 入水瞬間,,的分別由-2.3°/s, 2.2°/s, 2.2°變化到-48°/s, -7°/s, -7.4°, 一次滑跳轉向周期UAV的偏航角分別為1.1°和1.9°。
仿真結果顯示, 隨著固定舵角增大, 階躍激勵增大, 跨介質UAV偏航角速度動態振蕩響應明顯增大, 較為有效地增加了一個滑跳周期內UAV的有效實際偏航角, 提高了偏航能力。由于偏航響應的增大, 自穩阻尼對偏航的修正亦隨之增加, 導致整個偏航通道對階躍擾動的響應幅值顯著增大。但增大舵角隨之帶來擾動峰值的增大, 導致橫滾角隨之急劇增大, 與此同時, 橫滾擾動依賴舵面控制而缺乏相應自穩阻尼作用, 導致在階躍擾動后的振幅明顯增大, 具有一定的非線性特征, 橫滾通道對舵角的敏感性大于偏航通道, 使橫滾通道動態響應特性趨于惡劣, 特別是高海況條件的滑跳彈道, 可能導致跨介質UAV翼尖觸水傾覆, 從而造成整個滑跳彈道的縱向發散。綜上所述, 提高固定舵角, 可以有效增加滑跳偏航能力, 改善飛行器機動性, 但隨之導致橫滾狀態響應顯著增大, 可能對跨介質UAV滑跳彈道的安全實現造成重大隱患, 因此對固定舵角的選取具有很強的區間性, 需要進行合理匹配優化。
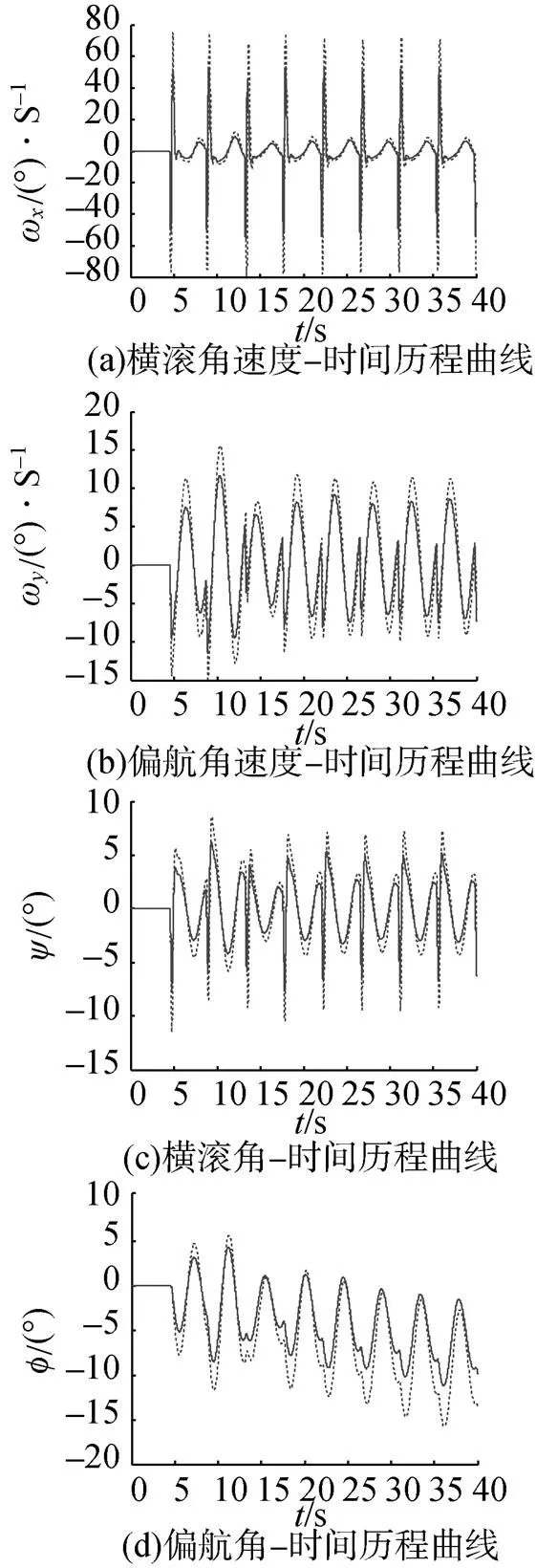
圖5 固定舵角對跨介質UAV偏航及其橫滾狀態的影響
3 結論
本文通過建立跨介質UAV滑跳轉向動力學模型和數值算法, 并對多種影響因素進行了相關的仿真研究, 表明所建模型可行。同時得到以下結論:
1) 當入水角增大時, 跨介質UAV橫滾通道響應下降, 偏航通道響應提高, 能夠有效改善UAV的危險飛行條件, 有利于滑跳轉向飛行的實施; 但滑水時間增加, 受到的水動力特別是高海況條件下的影響程度增加, 對控制系統提出了更高的要求。
2) 彈出舵固定舵角的增大, 可以顯著提高跨介質UAV觸水偏航的能力, 同時使所對應的跨介質UAV偏航響應呈線性增大, 但是橫滾通道響應更加敏感, 對飛行安全性有較大影響。
3) 在今后跨介質UAV設計中, 需要考慮滑跳入水角和彈出舵舵角的合理匹配, 同時需要注意UAV滑水沖擊所造成的結構破壞問題及其底部可能出現的空化現象。
[1] Paul R. Hybrid Ram-Wing/Planning Craft-Today′s Race boats, Tomorrow′s Outlook[J]. Ships Engineering Service, AIAA, 2001(24): 1-8.
[2] Ghassemi H, Ghiasi M. A Combined Method for the Hydrodynamic Characteristics of Planning Crafts[J]. Ocean Engineering, 2008, 35(3-4): 310-322.
[3] Collu M, Patel M H, Trarieux F. A Mathematical Model to Analyse the Static of Hybrid (Aero Hydydrodynamically Supproted) Vehicles[C]//8th Symp.on High Speed Marine Vehicles, Naples Italy, 2008: 148-161.
[4] Savitsky D, De Lorme M F, Datla R. Inclusion of Whisker Spray Drag in Performance Prediction Method for High-speed Planing Hulls[J]. Marine Technology, 2007, 44(1): 35-56.
[5] Xie N, Vassalos D, Jasionowski A. A Study of Hydrodynamics of Three-dimensional Planing Surface[J]. Journal of Ocean Engineering, 2005, 32(13): 1539-1555.
[6] Savander B R, Scorpio S M, Taylor R K. Steady Hydrodynamic of Planing Surface[J]. Journal of Ship Research, 2004, 46(4): 248-279.
[7] Tarafder S. Third Order Contribution to the Wave-making Resistance of a Ship at Finite Depth of Water[J]. Journal of Ocean Engineering, 2007, 34(1): 32-44.
[8] 趙連恩. 高性能船舶水動力原理與設計[M]. 哈爾濱: 哈爾濱工程大學出版社, 2007.
[9] 張宇文. 魚雷彈道與彈道設計[M]. 西安: 西北工業大學出版社, 1999.
[10] 吳子牛. 空氣動力學[M]. 北京: 清華大學出版社, 2008.
[11] 王永虎, 石秀華, 李文哲, 等. 斜入水高速沖擊的理論建模及緩沖分析[J]. 機械科學與技術, 2008, 27(6): 766-769. Wang Yong-hu, Shi Xiu-hua, Li Wen-zhe, et al. Modeling and Cushioning Analysis of Oblique Water Entry with High Velocity[J]. Mechanical Science and Technology for Aerospace Engineering, 2008, 27(6): 766-769.
(責任編輯: 陳 曦)
Modeling and Simulation of Dynamic Characteristics of Slide Jump Steering Trajectory for Trans-media UAV
LI Jin-hong, YANG An-qiang, SU Ling-yun
(Kunming Shipborne Equipment Research & Test Center, Kunming 650051, China)
A trans-media unmanned aerial vehicle (UAV), flying near water surface, cannot obtain steering force by conventional air rudder, which results in difficult steering and poor maneuverability of the UAV. A slide jump steering method of the UAV on water surface and a dynamic model of slide jump steering flying of the UAV are hence proposed in this paper on the basis of the aerodynamics, the classic potential flow theory, and the two-element plane sliding theory. The slide jump steering characteristics of the UAV and the influencing factors are simulated with the model and analyzed in detail. Moreover, some approaches for inhibiting UAV roll are given. Simulation results show that the water-entry angle and the fixed rudder angle of the UAV impose significant effects on its posture and trajectory pattern in the process of slide jump steering. This study may provide theoretical and calculation foundation for the UAV′s conceptual overall design, trajectory planning, flight reliability design and flight control system design.
unmanned aerial vehicle (UAV); trans-media; slide jump trajectory; steering characteristic; simulation
TJ630.1
A
1673-1948(2012)06-0401-06
2012-03-05;
2012-07-04.
李金洪(1984-), 男, 碩士, 助理工程師, 主要從事水下航行體控制系統分析與設計, 電子系統測試.
