基于任務(wù)級的空間遙操作研究
2012-09-19 00:50:38李世其朱文革王明明
載人航天 2012年5期
趙 迪,李世其,朱文革,王明明
(1華中科技大學(xué)機(jī)械科學(xué)與工程學(xué)院,武漢430074;2湖北工業(yè)大學(xué)機(jī)械工程學(xué)院,武漢430068)
1 引言
遙操作系統(tǒng)可以使機(jī)器人等智能設(shè)備代替人類工作在危險、人類不能到達(dá)或人類不適于長期駐留的環(huán)境中。遙操作的應(yīng)用領(lǐng)域和范圍決定了其主端和從端的空間距離的分布,時延是一個不可避免的突出問題,試驗證明對于通常意義下的雙向力反饋遙操作系統(tǒng),如果存在0.25s的時延就可能造成系統(tǒng)的不穩(wěn)定,嚴(yán)重降低人的操作感覺,進(jìn)而降低遙操作的效率和安全性。為了解決時延帶來的遙操作系統(tǒng)的透明性問題很多學(xué)者進(jìn)行了相關(guān)的研究,主要采用的方法包括遙編程,預(yù)測控制和基于事件監(jiān)督控制方式[1,2,3]。傳統(tǒng)的解決方法是利用基于虛擬現(xiàn)實(shí)的預(yù)測圖形仿真技術(shù)來消除其影響,即建立一個虛擬的仿真環(huán)境,該虛擬仿真環(huán)境可以實(shí)時將操作結(jié)果反饋給操作者,而遠(yuǎn)端的機(jī)器人則在一定的時延后重復(fù)仿真結(jié)果,這樣就可使操作者面對虛擬仿真模型進(jìn)行連續(xù)地實(shí)時操作,以克服時延的影響。
我國在2011年11月通過神舟八號飛船實(shí)現(xiàn)了空間自動交會對接,空間遙操作技術(shù)在遙操作交會對接中的應(yīng)用,可以作為未來我國空間站無人飛行器自動交會對接系統(tǒng)的備份手段,也可用于空間非合作目標(biāo)的空間交會和對接。在遙操作中當(dāng)從端遠(yuǎn)離主端時,兩者之間的通訊時延不可忽略。例如,在地面站與行星軌道上的空間機(jī)器人之間的通訊時延達(dá)到了 3s~6s[4,5,6]。當(dāng)采用傳統(tǒng)的方法時,在這樣大的通信時延下可能導(dǎo)致整個系統(tǒng)的不穩(wěn)定。此外,遠(yuǎn)端的操作環(huán)境也可能因某些外界因素的作用而發(fā)生變化,而這些變化卻不能及時地在仿真中得到反映,因此如完全依靠操作者對復(fù)雜的任務(wù)進(jìn)行實(shí)時的主從遙操作,則經(jīng)常面臨“運(yùn)動-等待-運(yùn)動”的問題,一方面需要操作者具有很強(qiáng)的任務(wù)規(guī)劃能力和遙操作的專業(yè)知識;另一方面增加了操作者的疲勞程度,降低了遙操作的效率[7,8]。
為解決復(fù)雜遙操作的任務(wù)規(guī)劃難、任務(wù)執(zhí)行質(zhì)量、效率難以保證和非專業(yè)人員無法進(jìn)行操作等問題,充分融合動作研究理論和Petri網(wǎng)技術(shù)的各自優(yōu)勢,本文提出了一種機(jī)器人遙操作任務(wù)規(guī)劃和仿真方法。該方法由將遙操作任務(wù)進(jìn)行三階段劃分,使用六元組結(jié)構(gòu)描述遙操作任務(wù)并動素分析方法對遙操作任務(wù)進(jìn)行仿真規(guī)劃。
2 基于任務(wù)級模塊化的遙操作結(jié)構(gòu)
如圖1所示,針對遙操作任務(wù)仿真將其劃分為任務(wù)規(guī)劃層和動作仿真層兩個層次,簡稱任務(wù)規(guī)劃層和動作仿真層。任務(wù)規(guī)劃層是指完成給定的一套任務(wù)的輸入、規(guī)劃和控制的集成與協(xié)調(diào),主要完成任務(wù)輸入、任務(wù)劃分與描述、任務(wù)規(guī)劃與建模、任務(wù)過程仿真等工作,產(chǎn)生動素指令序列,指導(dǎo)動作仿真層功能的實(shí)現(xiàn)。動作仿真層是任務(wù)規(guī)劃層任務(wù)規(guī)劃在虛擬環(huán)境中的具體體現(xiàn)和驗證,主要負(fù)責(zé)接受任務(wù)規(guī)劃層指令,完成指令的映射、動素仿真和仿真反饋等工作,以及通過仿真反饋實(shí)現(xiàn)任務(wù)規(guī)劃的改正與優(yōu)化,最終實(shí)現(xiàn)遙操作任務(wù)的精確、最優(yōu)控制。
在“任務(wù)規(guī)劃層—動作仿真層”結(jié)構(gòu)中,任務(wù)規(guī)劃層特指高層任務(wù)規(guī)劃,動作仿真層特指低層的具體動作執(zhí)行。
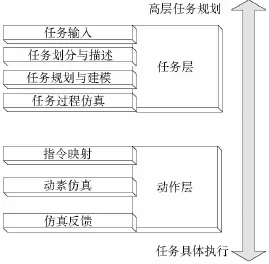
圖1 遙操作任務(wù)仿真的雙層規(guī)劃方法示意圖
任務(wù)輸入模塊主要實(shí)現(xiàn)與操作者的交互,為操作者提供任務(wù)級操作界面,接受任務(wù)輸入、進(jìn)行任務(wù)描述。任務(wù)解析、具體執(zhí)行指令交由任務(wù)層和動作層的其他模塊完成,這些模塊由一系列算法與知識庫組成,提供具體的規(guī)劃方案與執(zhí)行策略。
本文所用的任務(wù)規(guī)劃策略為,面向任務(wù)規(guī)劃層,采用Petri網(wǎng)對任務(wù)規(guī)劃層遙操作建立Petri網(wǎng)模型,即對作業(yè)單元粒度和動作單元粒度建立上層任務(wù)模型和下層子任務(wù)模型,實(shí)現(xiàn)遙操作任務(wù)的自動劃分、優(yōu)化和建模。

圖2 遙操作任務(wù)規(guī)劃和動作仿真示意圖
如圖2所示,本文提出的復(fù)雜遙操作任務(wù)規(guī)劃方法:首先接受復(fù)雜遙操作任務(wù)輸入,采用本文提出的作業(yè)、動作與動素分析方法、任務(wù)三階段劃分方法和六元組結(jié)構(gòu)描述法進(jìn)行任務(wù)劃分與描述,應(yīng)用Petri網(wǎng)理論進(jìn)行任務(wù)規(guī)劃和任務(wù)建模,并采用Petri網(wǎng)仿真工具進(jìn)行任務(wù)過程仿真,隨之產(chǎn)生相應(yīng)的動素指令序列,至此任務(wù)規(guī)劃層的工作結(jié)束。動作仿真層則負(fù)責(zé)將動素指令序列輸入虛擬環(huán)境[9],通過指令映射,產(chǎn)生相應(yīng)的動素仿真;從仿真結(jié)果可判斷任務(wù)規(guī)劃是否正確,正確則輸出相應(yīng)的操作指令,否則返回至Petri網(wǎng)任務(wù)規(guī)劃和任務(wù)建模階段,從而對其進(jìn)行修改,直至輸出正確的動素仿真為止。
在遙操作系統(tǒng)中操作者處于任務(wù)規(guī)劃層,僅進(jìn)行上層的宏觀任務(wù)規(guī)劃和高級操作;機(jī)械臂的具體執(zhí)行與基本操作由動作層具體實(shí)現(xiàn),該層對操作者透明。
動作層實(shí)現(xiàn)對空間機(jī)械臂的基本操作,如平移旋轉(zhuǎn)子操作;動作層還將實(shí)現(xiàn)虛擬現(xiàn)實(shí)場景中模型的各自由度與空間機(jī)械臂維護(hù)環(huán)境中物體的各自由度的映射,將操作指令發(fā)送到空間機(jī)械臂控制器,完成遙操作任務(wù)。
當(dāng)操作者完成宏觀的任務(wù)級操作后,交由任務(wù)規(guī)劃與建模模塊和動作層將宏觀任務(wù)分解成若干子任務(wù)。通過參數(shù)選擇組合已知的子任務(wù)集,實(shí)現(xiàn)由多個子任務(wù)組成的任務(wù)序列,并實(shí)現(xiàn)具體的機(jī)械臂及末端操作機(jī)構(gòu)動作。
3 復(fù)雜遙操作任務(wù)的描述
復(fù)雜遙操作任務(wù)各異,可以對其進(jìn)行結(jié)構(gòu)化描述,以便建模規(guī)劃。針對遙操作任務(wù)的特點(diǎn),本文采用六元組結(jié)構(gòu)描述遙操作任務(wù)。具體描述形式如下:
每個復(fù)雜的遙操作任務(wù)的都可以表示為如下六元組:

其中:O表示任務(wù)模型T的操作對象集 (如空間機(jī)械臂的末端操作工具等);G表示任務(wù)T的目標(biāo)集(如被操作目標(biāo)物等);C表示當(dāng)前任務(wù)T所處的環(huán)境及約束條件集(如作業(yè)空間限制限制、運(yùn)動學(xué)約束及障礙物等);V表示任務(wù)T所包含的變量集(如各自由度角度值以及空間坐標(biāo)系內(nèi)的位移等);R表示任務(wù)T中變量之間的關(guān)系集(如各自由度之間的轉(zhuǎn)換關(guān)系等);S表示變量的狀態(tài)集(如傳感器返回的當(dāng)前系統(tǒng)狀態(tài)等)。
該描述方法的優(yōu)點(diǎn)是,所有遙操作任務(wù)均可描述為統(tǒng)一的結(jié)構(gòu)化形式,方便計算機(jī)進(jìn)行任務(wù)規(guī)劃計算與優(yōu)化。復(fù)雜的遙操作任務(wù)可以分解成為簡單任務(wù)的序列。根據(jù)動作研究的理論,任何一個操作過程都可以分解成“接近-操作-離開”三個步驟,而其中的步驟又可分解成機(jī)械臂與靈巧手的動素。動素級別的操作加上參數(shù)化驅(qū)動,可由從端機(jī)械臂/靈巧手系統(tǒng)執(zhí)行。根據(jù)描述中各集合之間的關(guān)系,可將復(fù)雜遙操作任務(wù)細(xì)分為三層,即作業(yè)、動作與動素。每一層的任務(wù)均可由六元組結(jié)構(gòu)描述。
對機(jī)械臂/靈巧手系統(tǒng)抓取物體任務(wù)進(jìn)行任務(wù)三階段劃分如下:接近物體;抓取任務(wù)遙操作;離開作業(yè)空間。
基于該任務(wù)的六元組結(jié)構(gòu)描述,由于機(jī)械臂/靈巧手各任務(wù)階段所完成的工作不同,三階段分別包含六元組結(jié)構(gòu)描述中的不同參數(shù)組合。
4 基于petri網(wǎng)的遙操作任務(wù)規(guī)劃和仿真方法
本文提出的遙操作任務(wù)劃分方法,具體為:根據(jù)作業(yè)、動作與動素分析方法將遙操作任務(wù)劃分為作業(yè)單元、動作單元和動素單元三個層次;根據(jù)任務(wù)三階段劃分方法,將遙操作任務(wù)劃分為接近、操作和離開三階段,作業(yè)單元劃分、動作單元劃分與動素單元劃分均可依據(jù)此原則進(jìn)行劃分,各級劃分存在粒度差異;根據(jù)任務(wù)六元組結(jié)構(gòu)描述法,在任務(wù)劃分和描述的基礎(chǔ)之上,對任務(wù)結(jié)構(gòu)、參數(shù)及其之間相互關(guān)系進(jìn)行描述。
對任務(wù)規(guī)劃層遙操作建立Petri網(wǎng)模型,即對作業(yè)單元粒度和動作單元粒度建立上層任務(wù)模型和下層子任務(wù)模型,實(shí)現(xiàn)遙操作任務(wù)的自動劃分、優(yōu)化和建模。
以取物任務(wù)為研究對象,根據(jù)圖3取物任務(wù)分解示意圖,采用結(jié)構(gòu)化建模的方法,建立Petri網(wǎng)層次模型圖,如圖4。上層任務(wù)模型在作業(yè)單元粒度層面上將任務(wù)分解為進(jìn)入作業(yè)空間、進(jìn)入操作空間和離開作業(yè)空間三個子系統(tǒng),下層子任務(wù)模型則在動作單元粒度上對上層模型進(jìn)一步細(xì)分。
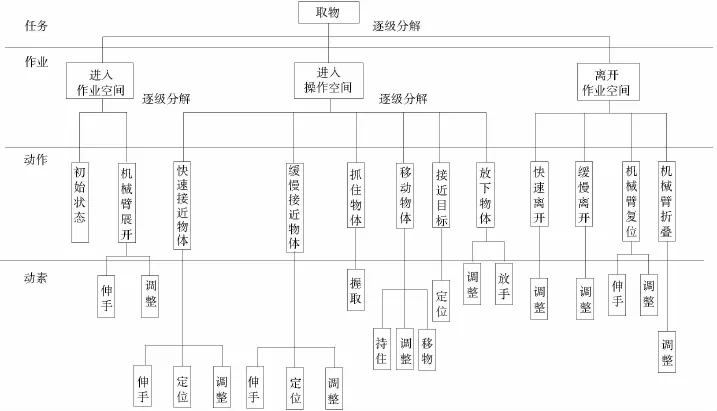
圖3 取物任務(wù)分解示意圖
上層任務(wù)模型如圖5所示,該模型的庫所和變遷的含義如表1、表2。
下層子任務(wù)模型在動作單元粒度層面又分為進(jìn)入作業(yè)空間、進(jìn)入操作空間和離開作業(yè)空間三個流程單元。
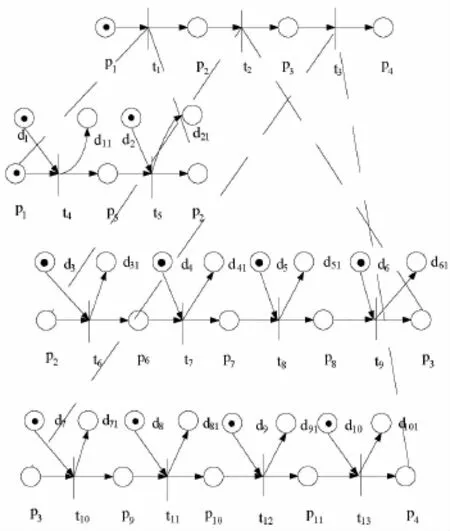
圖4 Petri網(wǎng)層次模型圖
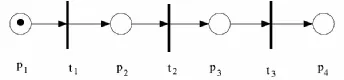
圖5 上層任務(wù)模型圖
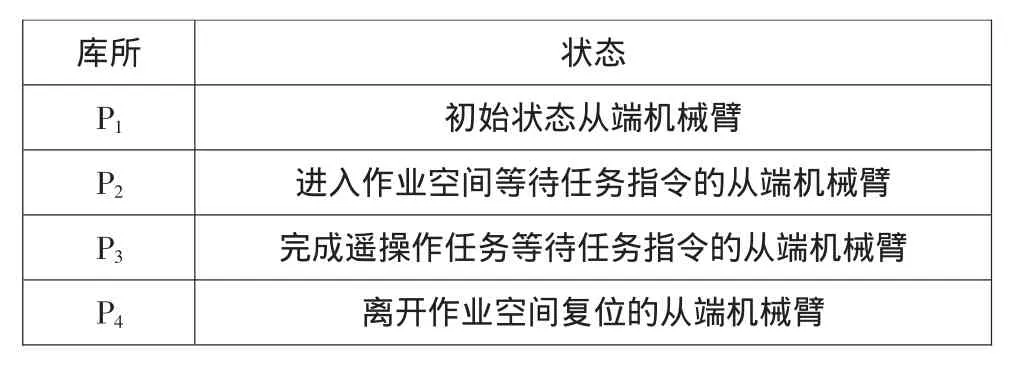
表1 任務(wù)模型庫所表
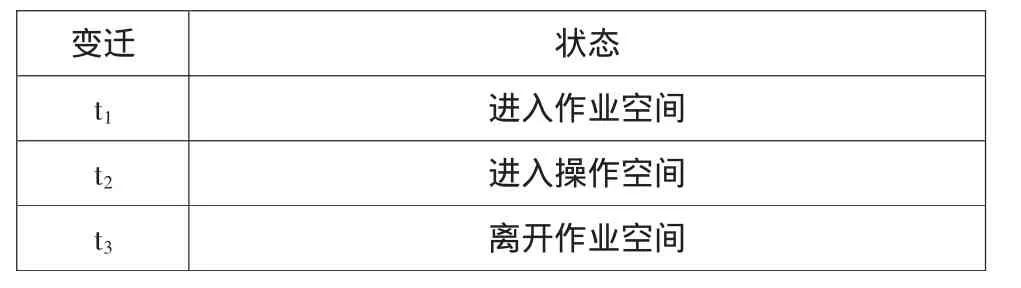
表2 任務(wù)模型變遷表
進(jìn)入作業(yè)空間子系統(tǒng)Petri網(wǎng)模型如圖6所示,該模型的庫所和變遷含義如表3、表4。

表3 進(jìn)入作業(yè)空間子系統(tǒng)Petri網(wǎng)模型庫所表

表4 進(jìn)入作業(yè)空間子系統(tǒng)Petri網(wǎng)模型變遷表
進(jìn)入操作空間子系統(tǒng)Petri網(wǎng)模型如圖6所示(圖中di1表示執(zhí)行指令后反饋的信息),該模型的庫所和變遷含義如表5、表6。

圖6 操作空間子系統(tǒng)Petri網(wǎng)模型圖

表5 進(jìn)入操作空間子系統(tǒng)Petri網(wǎng)模型庫所表

表6 進(jìn)入操作空間子系統(tǒng)Petri網(wǎng)模型變遷表
離開作業(yè)空間子系統(tǒng)Petri網(wǎng)模型如圖7所示,該模型的庫所和變遷含義如表7、表8。
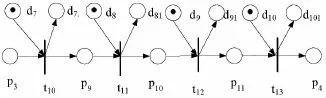
圖7 離開作業(yè)空間子系統(tǒng)Petri網(wǎng)模型

表7 離開作業(yè)空間子系統(tǒng)Petri網(wǎng)模型庫所表
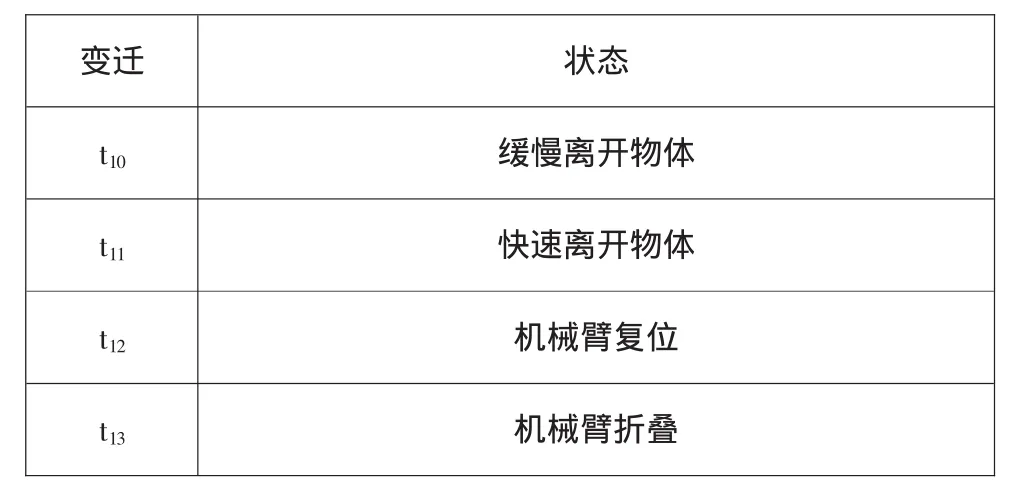
表8 離開作業(yè)空間子系統(tǒng)Petri網(wǎng)模型變遷表
在上述Petri網(wǎng)模型的基礎(chǔ)上,采用基于Petri網(wǎng)仿真工具描述任務(wù)過程和實(shí)現(xiàn)任務(wù)仿真,其輸出數(shù)據(jù)驅(qū)動動作仿真層虛擬環(huán)境動作仿真,從而來驅(qū)動場景動畫,從任務(wù)規(guī)劃層和動作仿真層兩方面對遙操作進(jìn)行全面而準(zhǔn)確的任務(wù)規(guī)劃和仿真,從而實(shí)現(xiàn)對遙操作的準(zhǔn)確預(yù)測和控制。
虛擬環(huán)境仿真和基于Petri網(wǎng)仿真間的數(shù)據(jù)調(diào)用關(guān)系如圖 8所示,虛擬環(huán)境場景依次讀取基于Petri網(wǎng)仿真的仿真輸出數(shù)據(jù),完成操作動作,此過程是對任務(wù)規(guī)劃中動作單元層數(shù)據(jù)從左至右的遍歷,遍歷完成,任務(wù)隨之完成。
從虛擬環(huán)境場景運(yùn)動仿真過程來看,動作的執(zhí)行順序與Petri網(wǎng)的任務(wù)規(guī)劃相一致,動作的執(zhí)行幅度與基于Petri網(wǎng)仿真的仿真輸出參數(shù)相一致。
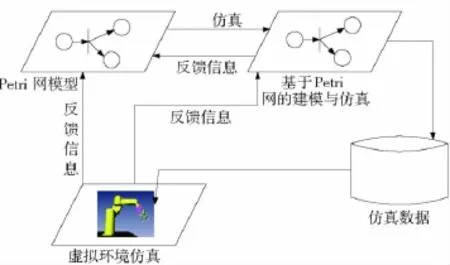
圖8 虛擬環(huán)境仿真和仿真間的數(shù)據(jù)調(diào)用關(guān)系圖
通過虛擬環(huán)境場景運(yùn)動仿真,可以直觀觀察到,機(jī)械臂/靈巧手系統(tǒng)按照任務(wù)規(guī)劃的運(yùn)動順序,逐個完成每個動作,抓取物體、移動物體、放置物體等,任務(wù)的執(zhí)行準(zhǔn)確無誤,且機(jī)械臂/靈巧手系統(tǒng)未與物體發(fā)生不安全的碰撞,任務(wù)的完成效果比較理想。
5 試驗驗證
針對微重力環(huán)境下固體潤滑材料試驗裝置的取回操作,用本文的方法進(jìn)行任務(wù)分解,將復(fù)雜遙操作任務(wù)分解成為由從端機(jī)械臂系統(tǒng)可執(zhí)行的動素指令。
固體潤滑材料試驗裝置取回,主要有撥(插銷)、拉(插銷)、壓(把手)、提(把手)四個操作。以撥操作為例,該任務(wù)可描述為:

集合Om{機(jī)械臂/靈巧手};集合Gm{轉(zhuǎn)動插銷把手(后簡稱把手)};集合Cm{把手位置坐標(biāo)與目標(biāo)位置坐標(biāo)相符(主要是轉(zhuǎn)角對應(yīng))};集合Vm{把手的坐標(biāo)位置與尺寸,目標(biāo)位置的坐標(biāo)位置,機(jī)械臂的位置與姿態(tài),靈巧手的位置與姿態(tài)等};集合Rm{把手坐標(biāo)位置與最終撥動到位的位置的坐標(biāo)關(guān)系};集合Sm{當(dāng)前各傳感器所返回的系統(tǒng)狀態(tài)信息}。
基于以上的任務(wù)描述建立撥操作的Petri網(wǎng)模型,該操作可劃分為接近把手、轉(zhuǎn)動把手和離開把手三個子任務(wù);其中接近把手可以劃分為由初始狀態(tài)到機(jī)械臂快速接近把手和緩慢接近把手三個動作;快速接近把手和緩慢接近把手均可由伸手、定位和調(diào)整三個動素完成,其需要知道的參數(shù)來自于集合Vm。
經(jīng)過分析,得到“撥”操作的動素序列為:
初始化->伸手->定位->調(diào)整->伸手->定位->調(diào)整->握取->持住->調(diào)整->轉(zhuǎn)動->定位->調(diào)整->放手->調(diào)整1->調(diào)整2->伸手->調(diào)整1->調(diào)整2,加上相應(yīng)的參數(shù),機(jī)械臂便可自動執(zhí)行撥的操作,通過虛擬環(huán)境場景運(yùn)動仿真來驗證操作的正確性。在操作過程中,如果操作者發(fā)現(xiàn)操作有誤,可以實(shí)時進(jìn)行干預(yù),避免自動任務(wù)劃分功能不完備造成失誤。
6 總結(jié)與展望
此方案從任務(wù)規(guī)劃層和動作仿真層兩方面對遙操作進(jìn)行全面而準(zhǔn)確的任務(wù)規(guī)劃和仿真,充分發(fā)揮了任務(wù)規(guī)劃層整體規(guī)劃、協(xié)調(diào)和與操作者交互的功能,指導(dǎo)動作仿真層具體遙操作動作按照任務(wù)規(guī)劃策略進(jìn)行;任務(wù)規(guī)劃層和動作仿真層的積極反饋,指導(dǎo)任務(wù)規(guī)劃的優(yōu)化和調(diào)整,最終準(zhǔn)確、高效地完成遙操作任務(wù),簡化了工作人員的操作工作。在今后的研究中要進(jìn)一步加強(qiáng)任務(wù)自動劃分方法的研究。采用優(yōu)化算法,在多個任務(wù)劃分方案中選擇最優(yōu)方案進(jìn)行操作,提高遙操作任務(wù)效率。◇
[1]Sheridan T B.:Space tele-operation through time delay:review and prognosis.IEEE Trans on Robotic and Automation,1993,9(5):593-606.
[2] Niemeyer G.Using Wave Variables in Time Delayed Force Reflecting Tele-operation [M].PhD thesis,MIT,Cambridge,MA,1996.
[3] D.A.Lawrence.Stability and transparency in bilateral teleoperation.IEEE trans.Robotics and Automation,1993,9(5):624-637
[4]W.S.Kim.:Computer Vision Assisted Virtual Reality Calibration.IEEE Transactions On Robotics And Automation,1999,15(4):450-464.
[5]G.Hirzinger and B.Brunner.:ROTEX---The First Remotely Controlled Robot in Space IEEE International Conference on Robotics and Automation.1994:2604-2611.
[6]M.Oda,K.Kibe and F.Yamagata.:ETS-VII,Space Robot In-Orbit Example Satellite,IEEE International Conference on Robotics and Automations.1996:739-744
[7]K.Hashtrudi-Zaad,S.E.Salcudean.Transparency in time-delayed systems and the effect of local force feedback for transparent teleoperation.IEEE trans.Robotics and Automation,2002,18(1):108-114
[8]Xiong,Y.,Li,S.Xie,M.:Predictive display and interaction of telerobots based on augmented reality.Robotica.2005,24(1):447-453.
[9]Jindong Tan,Ning Xi.Hybrid System Design for Singularityless Task Level Robot Controllers.Proceedings of the 2000 IEEE International Conference on Robotics B Automation.2000:3007-3012.
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文評點(diǎn)報·低幼版(2017年7期)2017-03-11 20:49:41
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
