超音速反艦導彈攔截策略仿真*
2012-09-02 06:24:28錢占進劉家祺歐陽中輝于嘉暉
指揮控制與仿真
2012年6期
關鍵詞:艦艇
錢占進,劉家祺,歐陽中輝,于嘉暉
(1.解放軍91492部隊,山東 青島 266001;2.海軍航空工程學院,山東 煙臺 264001)
目前艦空導彈按射程可劃分為遠程(射程超過100km)、中程(射程 20km-100km)、近程(射程 10km-20km)和末端(射程不超過10km)四個層次,攔截的目標主要有低空飛行的飛機和反艦導彈,其中末端能進行機動的超音速反艦導彈速度快、過載大,留給火控系統的反應時間短,給準確攔截造成了很大的困難。
分析制導控制系統精度的主要方法[1]有蒙特卡洛法、協方差分析法和統計線性化伴隨法等。協方差分析法和統計線性化伴隨法現在已經發展得比較成熟,只需計算一次就可以達到足夠的精度,但是導彈的制導控制系統是變系數非線性的,其線性化過程中存在方法誤差,且理論推導過程復雜[2]。蒙特卡洛法可以對導彈整個工作過程進行全方位的模擬,因此可信度高,可以作為其他方法的驗證,不足之處是計算量大,需要經過多次仿真計算才能達到令人滿意的精度,計算機技術的飛速發展很好地解決了這個問題[3-4]。本文在三維彈道仿真的基礎上,采用蒙特卡洛法實驗法分析了反艦導彈對超音速反艦導彈的攔截情況。
1 艦空導彈三維矢量攔截模型
地面坐標系(Oxyz)d與地球固連,以導彈發射時刻艦空導彈質心在地面的投影點為原點Od,xd軸在水平面內,指向目標方向為正;yd軸沿鉛垂線向上為正;zd軸與其他兩軸垂直并構成右手坐標系,如圖1所示。
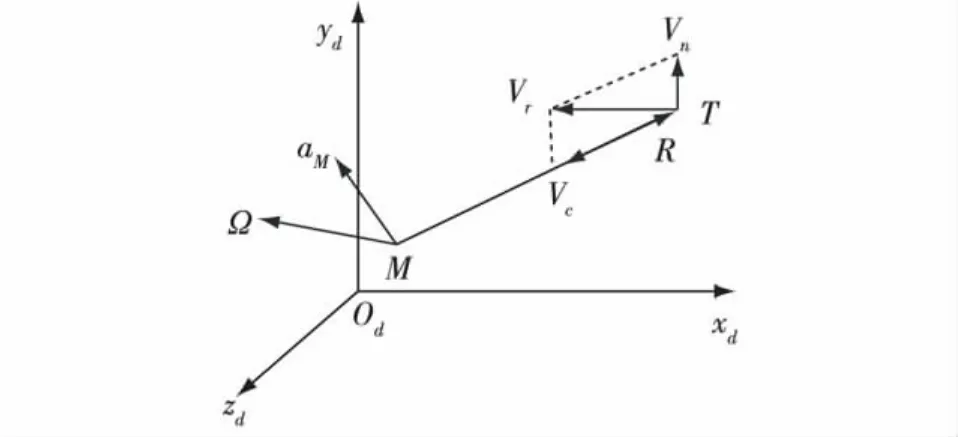
圖1 地面坐標系
反艦導彈和艦空導彈的速度分別為VT和VM,目標對于艦空導彈的相對速度矢量Vr=VT-VM,Vr在R方向的投影分量Vc,在R的垂直方向的投影分量為Vn。……
登錄APP查看全文
猜你喜歡
小學生學習指導(小軍迷聯盟)(2023年5期)2023-05-29 08:13:18
環球時報(2022-12-30)2022-12-30 15:15:00
軍事文摘(2022年13期)2022-08-27 01:26:26
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
艦船科學技術(2022年5期)2022-04-19 10:58:46
軍事文摘(2021年21期)2021-11-14 10:14:56
軍事文摘(2017年24期)2018-01-19 03:36:16
兵器知識(2017年10期)2017-10-19 19:31:38
軍事體育學報(2014年3期)2014-02-27 16:00:16
船海工程(2013年6期)2013-03-11 18:57:37