永磁同步電機轉子初始位置的自動標定*
2012-08-28 06:50:08曹艷玲文彥東
電機與控制應用 2012年8期
曹艷玲, 文彥東
(1.長春工程學院,吉林長春 130012;
2.中國第一汽車集團技術中心,吉林長春 130011)
0 引言
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)具有系統效率高、功率密度大等一系列優點,因而被廣泛使用。要實現PMSM的精確控制需要知道任意時刻電機轉子的位置。因此,在電機工作前首先要對電機轉子的初始位置進行標定。標定方法有兩類,即無位置傳感器估算法和有位置傳感器測量法。無位置傳感器估算法是通過逆變器要么施加交流電流,要么施加幅值較小的空間矢量電壓,對電機轉子位置估算。但這種方法計算復雜,而且對電機本體參數有很大的依賴性,因此在實際操作中很難保證高精度的測量,這會使得在電機控制中產生不期望的電流分量,尤其是在大電流幅值下,電流分量不可忽略,最終導致轉矩控制精度下降或者系統效率降低。有位置傳感器測量法是通過旋轉變壓器(簡稱旋變)獲得轉子的絕對位置。旋變具有良好的抗震性、抗干擾性及可靠性,因而在混合動力和純電動車用驅動電機上有著廣泛應用。目前,此種標定方法是經外部電源供電,利用電機逆變器對電機定子繞組施加空間電壓矢量U100,使電機轉子定位在A相,通過讀取旋變輸出信號得到電機轉子的初始位置,這種測定方法精度高,可實現PMSM的精確控制,但它需要采用逆變器及外部高壓供電,為便于現場調試。本文提出了一種檢測PMSM轉子初始位置的自動標定系統,無需上述方法提到的逆變器和外部高壓供電電源,只需將電機的兩個相線和旋變傳感器信號連接到標定系統中,即可快速、準確地完成轉子初始位置的自動測量。
1 轉子初始位置計算原理
旋變由定子和轉子構成,在安裝旋變時,將其定子和轉子分別與電機的定子和轉子安裝在一起。當電機旋轉時,旋變的轉子與電機轉子同步旋轉。旋變轉子的位置信息可以通過旋變解碼電路獲得,而電機轉子的位置可通過電機反電勢得到。通常情況下,旋變轉子的零位與電機轉子的零位不同,二者相差一個固定角度,該角度可以通過反電勢觀測法測量。
在電機不施加外部三相電壓的情況下,平滑勻速地旋轉PMSM轉軸,便會在定子側感生出正弦感應電動勢,其頻率及幅值與轉子旋轉速率成正比。用T表示電機線電壓UAB的周期,用t表示線電壓過零點至Z脈沖的時間間隔(如圖1所示),則電機轉子零位與旋變轉子零位的角度差為

式中:π/6為線電壓超前于相電壓的角度。
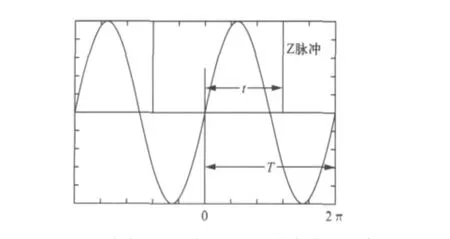
圖1 線電壓UAB與旋變Z脈沖波形示意圖
2 系統設計
圖2為PMSM轉子初始位置標定系統原理框圖。該系統以英飛凌16位單片機XC2785為處理和運算核心,輔以反電勢采集電路、旋變信號解碼電路及CAN通信電路構成。反電勢采集電路用以將正弦反電勢信號轉化為方波信號;旋變信號解碼電路用以讀取旋變Z脈沖信號;XC2785單片機用以計算反電勢周期T和過零時間間隔t,并由此得出位置角度差。由于CAN總線抗干擾能力強、傳輸距離遠,非常適合現場應用,此系統選用CAN總線將角度差信號發送到上位機或者其他節點,從而對電機轉子初始位置數據進行采集和管理。

圖2 系統原理框圖
2.1 硬件設計
2.1.1 反電勢采集電路設計
反電勢采集電路利用AD629對反電勢信號進行電壓隔離和放大,采用AD790做成比較器電路,將反電勢信號轉化為方波信號,如圖3所示。AD629采用±12 V雙電源供電,供電電源選用0.1 μF和 10 μF 的電容濾波,以保證輸出穩定。電機反電勢首先經電阻R1和R2分壓,再將電阻R2得到的電壓連接到AD629的正、負輸入引腳,并通過二極管對AD629的輸出進行電壓鉗位,以保證輸出電壓不會超過單片機AD引腳能夠承受的最大電壓;AD790是一款快速、精密的電壓比較器,采用雙電源供電,其負輸入端接地,正輸入端連接反電勢信號。AD790將AD629的輸出電壓經電平比較后轉化為方波信號輸送到單片機。
2.1.2 旋變解碼電路設計
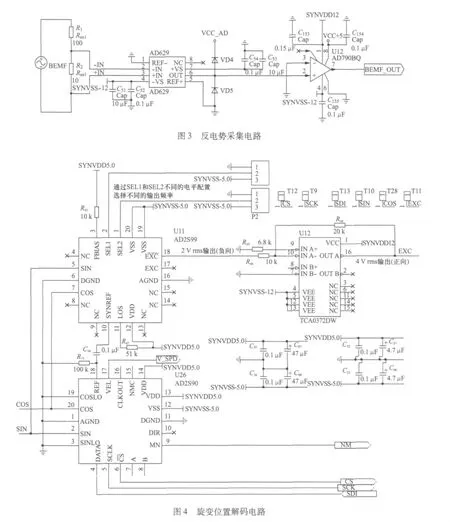
旋變位置解碼電路如圖4所示,采用的是AD2S90和 AD2S99轉換芯片,二者配合使用。AD2S90是解碼電路的核心,內部功能模塊主要包括相敏檢測器、乘法器、壓控振蕩器、增減計數器,形成一個閉環反饋系統。AD2S90位置信號以A-B-NM形式輸出,NM(North Marker)代表旋變轉子位置過零,旋變信號過零一次就會產生一個Z脈沖信號,將該信息輸入到單片機即可進行角度差的計算。AD2S99為AD2S90提供同步基準電壓信號,同時還給旋變提供高品質的正弦波勵磁信號,共有4種信號頻率可供選擇,即2 kHz、5 kHz、10 kHz和20 kHz,以滿足不同旋變傳感器的要求。另外,由于AD2S99的輸出能力有限,為了增加系統的驅動能力和抗干擾能力,在AD2S99勵磁信號輸出端增加運放以滿足旋變對輸入勵磁信號驅動能力的要求。
2.2 控制器軟件設計
系統軟件設計主要包括反電勢方波信號讀取、Z脈沖讀取、CAN通信及電機轉子初始位置計算四部分。反電勢和Z脈沖信號均被連接到單片機電平變化中斷引腳上,圖5為電機轉子初始位置計算時序圖。由于在一個反電勢周期中必然會出現一個Z脈沖,所以在反電勢方波電平上升沿中斷中起動定時器,在Z脈沖上升沿中斷中直接讀取定時器的數值,此數值即為線電壓過零點至Z脈沖的時間間隔t,而在下一次方波上升沿中斷中再次讀取定時器的數值,即為反電勢的周期T。對定時器清零,重新起動定時器,以實現多次重復測量,利用公式(1)可計算出電機轉子零位與旋變轉子零位的角度差θ。
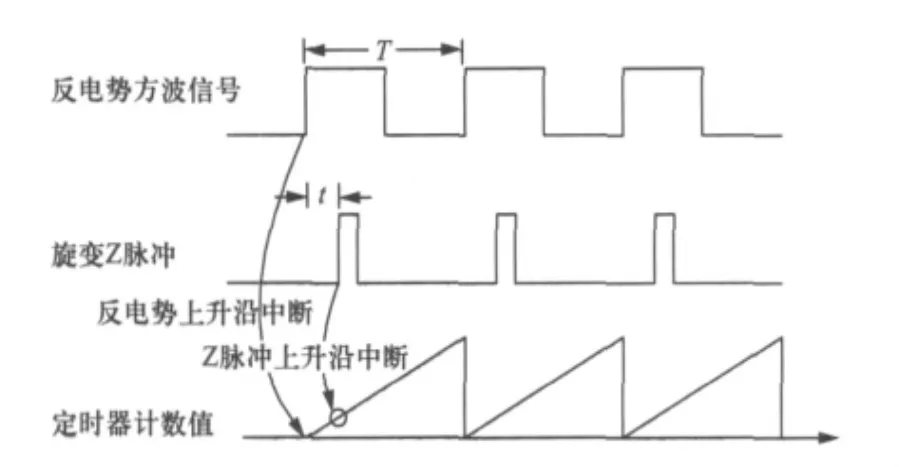
圖5 電機轉子初始位置計算時序圖
3 試驗結果
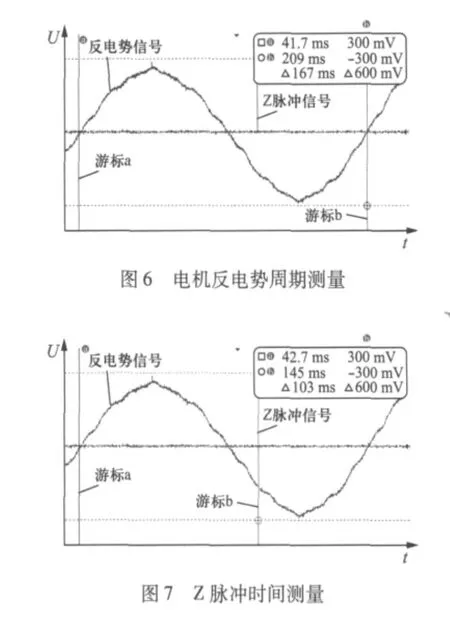
試驗中旋變采用的是多摩川公司的TS2225N14E102。此旋變要求勵磁輸入為AC7Vrms-10 kHz,輸入阻抗為 120 Ω ±20%,輸出阻抗為340 Ω。電機為內嵌式 PMSM,基速為2 000 r/min,峰值扭矩為300 N·m,峰值功率為40 kW,永磁磁鏈為0.070 7 Wb。取電機輸出軸順時針旋轉方向為正方向,將電機A、B相線連接到反電勢采集電路的正、負輸入端,將電機的旋變傳感器信號線連接到旋變位置解碼電路。單片機輸出顯示反電勢信號周期T為167.184 ms,反電勢過零點至 Z脈沖信號的時間間隔t為103.248 ms,電機轉子零位與旋變轉子零位的角度差θ是252.32°。為了對試驗結果進行驗證,將電機反電勢信號和旋變解碼電路輸出的Z脈沖信號輸入到示波器,得到的波形圖如圖6和圖7所示。從這兩個圖可以看出,通過示波器測得的T和t分別為167 ms和103 ms,導致這兩個測量結果存在差異的主要原因是單片機定時器的分辨率非常高,僅為4 μs,并且從單片機得到的試驗結果為多次測量的平均值。
4 結語
本文主要研究了PMSM轉子初始位置的自動標定與控制技術,設計了應用差分放大器對電機轉子位置信號進行采集,利用單片機對電機轉子初始位置數據進行處理和運算。試驗驗證了該測量方法可有效標定PMSM轉子初始位置,具有精度高、速度快和自動化等優點,并且該工具傳輸距離遠、抗干擾能力強,可節約時間和成本。
[1]GULEZ K,ADAM A A,PASTACI H.Torque ripple and EMI noise minimization in PMSM using active filter topology and field-oriented control[J].IEEE Transactions on Industrial Electronics,2008,55(1):251-257.
[2]OCEN D,ROMERAL L,ORTEGA J A,et al.Discrete space vector modulation applied on a PMSM motor[J].12th International Power Electronics and Motion Control Conference,2006:320-325.
[3]JIN N Z,WANG X D,GAO H Y,et al.Sliding mode based speed regulating of PMSM MTPA control system for electrical vehicles[C]∥ International Conference on Electronic and Mechanical Engineering and Information Technology,2011:987-992.
[4]KAEWJINDA W,KONGHIRUN M.Vector control drive of permanent magnet synchronous motor using resolver sensor[J].ECTI Transactions on Electrical ENG,Electronics,and Communications,2007(5):134-138.
[5]JUNG D S,SONG J H,LEE U H,et al.Improving design of HEV traction motor for high power density[C]∥ IEEE International Conference on Power Electronics and ECCE Asia,2011:2677-2680.
[6]TARIP A R,NINO-BARON C E,STRANGAS E G.Design and analysis of PMSMs for HEVs based upon average driving cycle efficiency[C]∥ IEEE International Electric Machines& Drives Conference,2011:218-223.
[7]李豹,左月飛.永磁同步電機轉子位置求取方法[J].電機與控制應用,2011,38(4):34-36.
[8]魯文其,胡育文,黃文新,等.無刷直流電機無位置傳感器轉子位置自檢測復合方法[J].電工技術學報,2008,23(9):70-75.
[9]周揚忠,胡育文,黃文新.直接轉矩控制電勵磁同步電機初始轉子位置估計[J].電工技術學報,2007,22(12):55-60.
[10]薛山,溫旭輝,徐志捷.基于AD2S90的數字旋轉變壓器[J].電工技術雜志,2003(9):102-104.
[11]史久根.CAN現場總線系統設計技術[M].北京:國防工業出版社,2004.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
