基于Diamond的ROAM算法研究*
2012-08-13 08:13:28王智利
電子技術應用 2012年12期
關鍵詞:細節(jié)
王智利,寧 芊
(四川大學 電子信息學院,四川 成都 610065)
飛行模擬系統(tǒng)、VR系統(tǒng)、3D游戲及數(shù)字地球等都離不開大規(guī)模地形的實時渲染技術。快速而高效地渲染地形是計算機圖形學的研究熱點,也是三維系統(tǒng)建模的一個關鍵技術。
近年來,真實感DEM數(shù)據(jù)來源豐富、數(shù)據(jù)量龐大、精度高,全分辨率顯示地形可行性已變得簡單易行。因此,模型簡化技術、多分辨率表示和LOD(Level of Detail)技術成為近年來研究的熱點[1]。基于多層次細節(jié)的實時優(yōu)化自適應網(wǎng)格動態(tài)地形渲染算法ROAM(Real—time Optimally Adapting Meshes)憑借其簡單性和可擴展性成為解決海量高程數(shù)據(jù)地形可視化的常用方法[2];基于分塊的ROAM算法在處理大規(guī)模數(shù)據(jù)時取得了較好的渲染效率[3];基于金字塔思想的ROAM算法對大數(shù)據(jù)量地形及紋理數(shù)據(jù)進行分層分塊預處理和塊內(nèi)LOD預處理,提高了渲染效率[4]。這些,都是基于傳統(tǒng)的ROAM算法進行的改進。傳統(tǒng)意義上的ROAM算法使用Triangle-Bintree實現(xiàn)存儲三角形坐標[5]。
基于鉆石節(jié)點ROAM算法的基本數(shù)據(jù)結(jié)構(gòu)是鉆石節(jié)點。基本數(shù)據(jù)結(jié)構(gòu)的不同,使基于鉆石節(jié)點的ROAM算法在實現(xiàn)上與傳統(tǒng)ROAM算法存在極大的差異;數(shù)據(jù)結(jié)構(gòu)的更加對稱,使算法擁有更快的渲染速度,在三維系統(tǒng)建模中,有利于提高三維系統(tǒng)的運行效率。本文研究了實現(xiàn)鉆石節(jié)點的基本數(shù)據(jù)結(jié)構(gòu)及算法的關鍵技術,并將視點與地形復雜程序的節(jié)點誤差公式應用到算法中,提升了算法渲染速度。
1 基于鉆石節(jié)點的ROAM算法介紹
1.1 鉆石節(jié)點數(shù)據(jù)結(jié)構(gòu)
1.1.1 基本數(shù)據(jù)結(jié)構(gòu)
基本鉆石節(jié)點包括唯一一條用于區(qū)分的對角線 (對角線將鉆石節(jié)點劃分為2個共斜邊的等腰直角三角形)、一個中心頂點C及其包圍球半徑R[6],如圖1所示。同時,每個鉆石節(jié)點有4個父鉆石節(jié)點和4個孩子鉆石節(jié)點,如圖2、圖3所示。
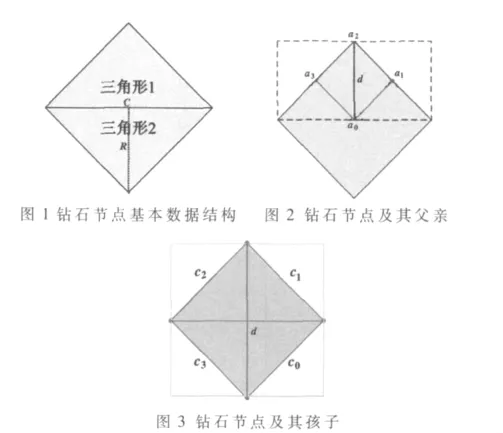
對于每個鉆石節(jié)點來說,父鉆石節(jié)點指那些與當前鉆石節(jié)點重疊,且細節(jié)層次較低的鉆石節(jié)點。父鉆石節(jié)點分為兩種:一種是位于對角線上的鉆石節(jié)點(圖2中的a0和a2),稱為祖先節(jié)點;另一種是只包含當前鉆石節(jié)點的一部分,細節(jié)層次只比當前鉆石節(jié)點的細節(jié)層次低一級,稱為父親節(jié)點。圖2中虛線標注的a1和a3即為這類節(jié)點,其中a1為右父親,a3為左父親。
孩子鉆石節(jié)點是那些與當前鉆石節(jié)點部分重疊,并且細節(jié)層次比當前鉆石節(jié)點高一級的鉆石節(jié)點,如圖3所示。當前鉆石節(jié)點的4個孩子鉆石節(jié)點逆時針方向順序為 c0、c1、c2、c3。
鉆石節(jié)點與其父親與孩子之間用指針連接,表示為:d→ai,d→ci(i=0,1,2,3)。
1.1.2 訪問關鍵技術
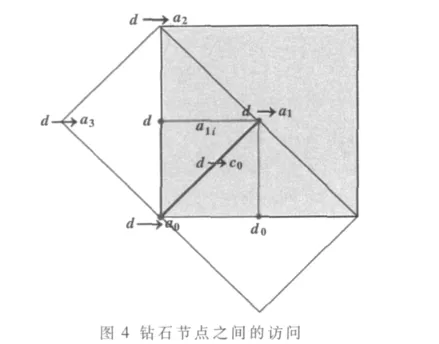
渲染過程中經(jīng)常需要訪問相同細節(jié)層次的鄰居鉆石節(jié)點。假設d和d0是同一細節(jié)層次的鉆石節(jié)點,并且它們同時是d的右父親節(jié)點a1(指針表示為d→a1)的孩子。假設 d是d→a1第 i(i=0,1,2,3)個孩子,索引表示為a1i,則按照逆時針方向,d0將是 d→a1的第(a1i+1)mod4個孩子。
算法實現(xiàn)過程中,相同細節(jié)層次的鉆石節(jié)點之間的訪問操作十分頻繁。為了提高訪問性能,可以將d作為其右父親 d→a1的第a1i個孩子和d作為其左父親d→a3的第 a3i個孩子的索引,將 a1i、a3i存儲在 d的數(shù)據(jù)結(jié)構(gòu)中。則:
通過c0對角線所在的邊訪問d0可以表示為:

細節(jié)層次增加時,需要為當前鉆石節(jié)點增加孩子節(jié)點。為d增加孩子節(jié)點c=d→c0時,首先要判斷c的另外一個父親d0是否存在,如果不存在,則需要遞歸地將d0添加到其父親節(jié)點d→al的孩子節(jié)點中。新添加的孩子c有兩個父親 d和 d0,d是左父親還是右父親與 c的祖先a0的確定有關。由圖4可以看出,c的祖先有d→a0和 d→al,考慮到 c的父親 d的連接關系(d→a0),c→a0取d→a1。接下來,按照逆時針方向,確定出 c的連接關系如下:
當刪除一個鉆石節(jié)點時,如果當前鉆石節(jié)點沒有孩子,則只需要將其左右父親中指向該鉆石節(jié)點的孩子指針置為空,表示如下:
如果當前鉆石節(jié)點有孩子,則需要對其孩子遞歸地執(zhí)行以上刪除操作[7]。
1.2 算法描述
1.2.1 地形數(shù)據(jù)管理
在基于鉆石節(jié)點的ROAM算法中,為使地形更快、更準確地渲染,高程數(shù)據(jù)大小要求為(2N+1)×(2N+1)。
本文使用原始數(shù)據(jù)大小為1025×1025的DEM高程數(shù)據(jù),每個高程點均可視為一個鉆石節(jié)點的中心點。根鉆石節(jié)點的中心點位于(512,512),且4個父節(jié)點位于地形塊的4個角。事實上,地形塊4個角上的節(jié)點并不是完整意義上的鉆石節(jié)點,稱為“偽鉆石節(jié)點”。引入“偽鉆石節(jié)點”只是為了體現(xiàn)算法的完整性。根鉆石節(jié)點的4個孩子鉆石節(jié)點中心點坐標為 (0,512)、 (512,0)、(1 024,512)、(512,1 024)。根鉆石節(jié)點位于0級細節(jié)層次,4個孩子位于1級細節(jié)層次。隨著渲染深度的增加,使得細節(jié)層次增加,需要渲染的鉆石節(jié)點數(shù)也增加。
每一個L級細節(jié)層次的鉆石節(jié)點在L-1級有2個父親節(jié)點,在L+1級有4個孩子節(jié)點。如果等級L的鉆石節(jié)點的對角線與坐標軸平行/垂直,則等級L+1的鉆石節(jié)點的對角線就與坐標軸形成45°夾角。在處理地形邊界時,將不存在的父鉆石節(jié)點指針設置為空。
1.2.2 雙隊列優(yōu)先
分裂與合并優(yōu)先隊列的引入,避免了ROAM算法每次渲染時都必須從根節(jié)點開始分裂,并且很好地利用了幀與幀之間的相關性,極大提升了ROAM算法的渲染速度[5]。基于鉆石節(jié)點的ROAM算法,在合并隊列與優(yōu)先隊列中保存的是鉆石節(jié)點的指針,并為每一個鉆石節(jié)點保存一個優(yōu)先級,優(yōu)先級最高的鉆石節(jié)點位于隊列的最前端[6]。
當細節(jié)層次低于要求時,尋找分裂優(yōu)先隊列里優(yōu)先級最高的鉆石節(jié)點d,并分裂d,分裂操作如圖5所示。當細節(jié)層次高于要求時,尋找合并優(yōu)先隊列里優(yōu)先級最高的鉆石節(jié)點d,并合并d,合并操作如圖6所示。
1.2.3 節(jié)點誤差
傳統(tǒng)ROAM算法中,分裂與合并優(yōu)先級根據(jù)節(jié)點的空間誤差來確定,空間誤差越大,分裂優(yōu)先級越高,合并優(yōu)先級越小。參考文獻[5]和參考文獻[8]提出了一種基于嵌套的世界空間范圍的節(jié)點誤差計算方法,該方法雖然精確,但計算復雜、速度慢。本文使用了一種基于視點與地形粗糙度的節(jié)點誤差計算方法。在基于視點的LOD算法中,節(jié)點的誤差主要由兩個因素決定:一是節(jié)點到視點的距離;另一個則是地形本身的粗糙程度[9]。
在基于鉆石節(jié)點的ROAM算法中,基本的數(shù)據(jù)結(jié)構(gòu)為鉆石節(jié)點,視點到觀察節(jié)點的距離可以用鉆石節(jié)點中心點的距離到視點距離來表示:

地形粗糙度采用鉆石節(jié)點中心點實際高程值與左右父親實際高程值的平均值計算。用公式表示如下:

實際渲染過程中,對地形的細化與地形粗糙度成正比,與視點到節(jié)點的距離成反比。同時本文還考慮到地形尺寸的影響,得到一個誤差計算公式:

其中MapSize為整個地形的尺寸;C為可調(diào)因子,可根據(jù)實際調(diào)節(jié),以達到最佳渲染效果。
1.2.4 視錐體裁剪
包圍球的計算基于三角形面片,每個鉆石節(jié)點包括2個三角形。為每一個鉆石節(jié)點計算包圍球半徑時,需要計算鉆石節(jié)點中點分別到4個父親頂點的距離,選出最長的距離作為其包圍球半徑[6]。測試可見性時,將每個鉆石節(jié)點包圍球與視錐體6個平面進行測試,當鉆石節(jié)點的包圍球位于視錐體內(nèi)時才進行渲染,以提高渲染速度。
2 算法實現(xiàn)流程
地形初始化之后,首先根據(jù)當前視點渲染地形。渲染過程中,當鉆石節(jié)點可見性發(fā)生變化時,需要根據(jù)節(jié)點誤差確定已變化的鉆石節(jié)點優(yōu)先級,并放入相應的優(yōu)先隊列。當判斷地形細節(jié)層次沒有達到要求時,將進行相應的分裂或合并操作,由此產(chǎn)生新的鉆石節(jié)點并同樣需要判斷其可見性,然后根據(jù)可見性更新需要渲染的三角形列表,最后將所有需要渲染的三角形渲染到屏幕,渲染過程如圖7所示。
圖7 算法實現(xiàn)流程
3 實驗及分析
本文算法采用VC6.0++和OpenGL來實現(xiàn)。實驗仿真的DEM數(shù)據(jù)量大小為1025×1025。計算機配置為:Intel Celeron CPU 1.73GHz處理器,1GB內(nèi)存,ATI RADEON XPRESS 200M Series集成顯卡,Windows XP操作系統(tǒng)。
圖8所示為只考慮視點,不考慮粗糙度的地形時,鉆石節(jié)點在平坦和粗糙的地方均勻分布。圖9、圖10所示為使用了節(jié)點誤差公式之后的地形,當粗糙度大或者距離視點近的地形采用更多的鉆石節(jié)點渲染。在節(jié)點誤差公式中可調(diào)因子C取值不同,而視點相同的情況下,地形顯示的細節(jié)層次不同。由結(jié)果可以看出,渲染當前地形C取值為0.001時較為理想。
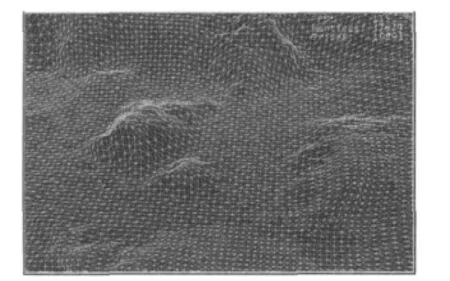
圖8 使用節(jié)點誤差公式前的地形
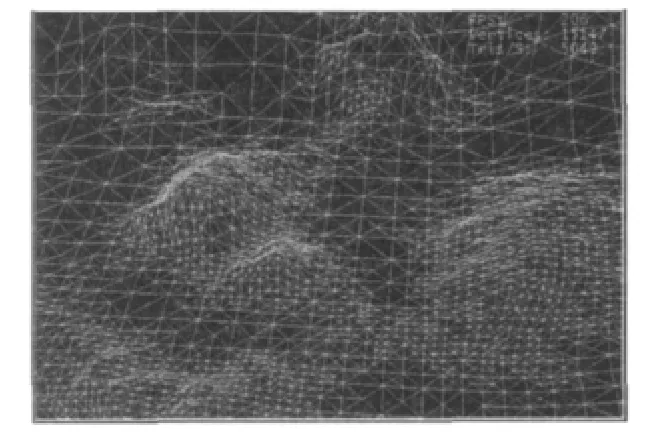
圖9 節(jié)點誤差公式C=0.001的地形

圖10 節(jié)點誤差公式C=0.003的地形
圖9所示地形每秒渲染的三角形數(shù)目為5 049個,比圖8所示的10 893地形減少了一半左右,渲染幀率從110幀左右提高到200幀左右,并且所示地形基本保持一致。因此,綜合考慮視點與地形粗糙度,可以在提高地形渲染效率的同時,保持原有的地形地貌不變。
本文詳細闡述了鉆石節(jié)點數(shù)據(jù)結(jié)構(gòu),對基于鉆石節(jié)點的ROAM算法實現(xiàn)過程中的關鍵技術進行了分析,并根據(jù)鉆石節(jié)點結(jié)構(gòu)特點,綜合考慮視點與地形粗糙度,提出了合理的節(jié)點誤差計算公式,最后用OpenGL和VC6.0++進行了算法和公式有效性驗證。實驗結(jié)果表明,在使用本文提出的節(jié)點誤差公式計算之后,渲染效率大幅提高,完全滿足交互式漫游的需求。
基于鉆石節(jié)點的ROAM算法與傳統(tǒng)的ROAM算法相比,鉆石節(jié)點更加對稱的數(shù)據(jù)結(jié)構(gòu)更適于程序渲染。將其應用到灌區(qū)三維系統(tǒng)建模中,實現(xiàn)三維地形地貌的快速渲染,是進一步研究的重點。
[1]曹敏,楊長興,楊煉.大規(guī)模地形漫游中動態(tài)LOD算法研究[J].計算機技術與發(fā)展,2008,18(10):187-189.
[2]魏楠,江南.ROAM算法及其在地形可視化中的應用[J].計算機工程與科學,2007,29(2):66-68.
[3]侯能,黎展勞,韋婷.基于分塊ROAM算法的設計與實現(xiàn)[J].科學技術與工程,2011,11(26):6459-6462.
[4]楊冠軍,陳洪,朱德海.基于金字塔思想改進的ROAM算法[J].電子技術應用,2007,33(8):130-132.
[5]DUCHAINEAU M,WOLINSKY M,DAVID E,et al.ROAMing Terrain:real-time optimally adapting meshes[C].Proceedings of the Conference on Visualization 97,1997.
[6]POLACK T.Focus on 3D terrain programming[M].Premier Press,2002.
[7]LOK M,MARK A.MEMBER D,et al.Realtime optimal adaptation for planetary geometry and texture:4-8 tile hierarchies[J].IEEE Transactions on Visualization and Computer Graphics,2005,11(2):6-8.
[8]LOSASSO F,HOPPE H.Geometry clipmaps:terrain rendering using nested regular grids[C].ACM Siggraph,2004.
[9]王金,楊克儉.基于ROAM的實時動態(tài)地形可視化研究[J].計算機與現(xiàn)代化,2011(5):57-60.
猜你喜歡
我愛學·笑話與口才(2024年9期)2024-08-08 00:00:00
江蘇安全生產(chǎn)(2022年6期)2022-07-29 01:22:48
家庭影院技術(2020年10期)2020-12-14 07:53:50
作文成功之路·小學版(2019年8期)2019-09-18 01:12:08
小學生優(yōu)秀作文(低年級)(2018年10期)2018-10-13 01:56:50
小學生優(yōu)秀作文(低年級)(2018年6期)2018-05-19 01:54:35
攝影之友(影像視覺)(2018年1期)2018-03-22 01:12:06
幸福(2017年18期)2018-01-03 06:34:47
小雪花·成長指南(2016年1期)2017-02-13 10:14:01
Coco薇(2016年10期)2016-11-29 19:59:58