集成RFID和視頻的車輛識別及管理系統(tǒng)
2012-07-26 06:08:00邱自學邵建新曹金偉
自動化儀表 2012年12期
嚴 奎 邱自學 袁 江 邵建新 曹金偉
(南通大學機械工程學院,江蘇 南通 226019)
0 引言
視頻監(jiān)測技術是目前應用于道路車輛識別的主流技術。隨著數(shù)字圖像技術的發(fā)展,從圖像中獲取車輛信息的準確率越來越高[1-3]。但視頻監(jiān)測技術本身存在一定的缺點:①拍攝效果容易受天氣、外界環(huán)境等情況影響;②對車牌被遮擋或涂改以及車輛套牌、假牌等違法現(xiàn)象無法有效識別。
無線射頻識別(radio frequency identification,RFID)是一種利用射頻信號來進行非接觸雙向通信的自動識別技術。該技術具有精度高、識別速度快、可在惡劣環(huán)境下工作等特點,已在道路交通監(jiān)測領域得到越來越多的應用[4-6]。但RFID信號的空間耦合傳輸本身具有隱蔽性,其不能提供可視化的圖像數(shù)據(jù)。
本文以S3C2440A處理器搭建嵌入式Linux平臺,快速融合RFID和視頻圖像信號,既能夠克服視頻交通監(jiān)測技術的一些不足,又能夠解決RFID技術信息傳輸隱蔽性和非圖像化等問題,從而提高了道路車輛識別的準確率。
1 監(jiān)測系統(tǒng)總體設計
集成RFID和視頻的監(jiān)測系統(tǒng)如圖1所示。
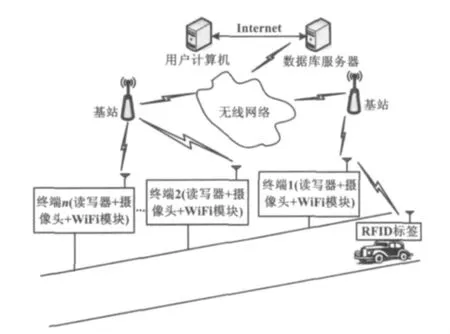
圖1 集成RFID和視頻的監(jiān)測系統(tǒng)Fig.1 The monitoring system integrating RFID and video
車載電子標簽、讀寫器終端單元、可遠端登錄的Web數(shù)據(jù)庫服務器網(wǎng)站3部分構成一套完整的、集成射頻與視頻的交通監(jiān)測與管理系統(tǒng)。車載電子標簽存儲有機動車車牌、車型等參數(shù)信息,當機動車經(jīng)過安裝有讀寫器終端單元的某一關鍵路段時,標簽通過RFID模塊將這些信息無線發(fā)送給讀寫器單元。讀寫器接收到標簽發(fā)來的身份信息后,觸發(fā)USB攝像頭進行抓拍并存儲,然后將車輛身份信息和圖像數(shù)據(jù)打包融合,通過WiFi模塊上傳到數(shù)據(jù)庫服務器。本文利用Adobe Dreamweaver CS5軟件設計了可遠端登錄的Web數(shù)據(jù)庫服務器網(wǎng)站,其采用B/S模式和ASP開發(fā)工具生成動態(tài)Web網(wǎng)頁,用戶可通過瀏覽器登錄網(wǎng)站系統(tǒng)查詢相關信息。當某一站點有緊急路況信息時,管理者還可通過網(wǎng)頁向讀寫器發(fā)布預警公告信息。
比較讀寫器終端某一時刻采集到的車輛電子標簽信息和圖像數(shù)據(jù),如果信息一致,視為車輛準確識別;在圖像識別較差的情況下,以電子標簽信息為依據(jù),必要時可結合圖像信息進行人工識別。
2 硬件設計
2.1 電子標簽硬件設計
電子標簽硬件設計如圖2所示。
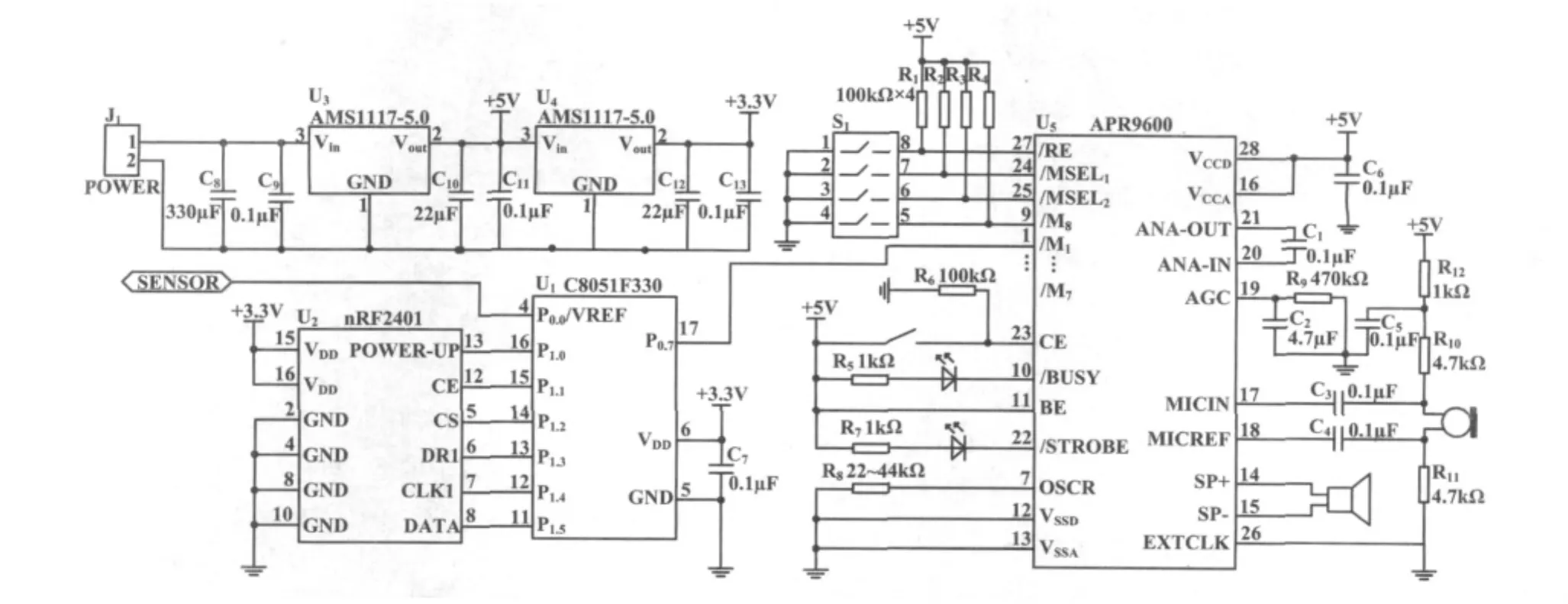
圖2 電子標簽硬件設計圖Fig.2 The hardware design of electronic tag
標簽微控制器選用C8051F330單片機,它是一款完全集成的混合信號片上系統(tǒng)型MCU,具有高速、流水線結構的8051兼容的CIP-51內(nèi)核和高精度可編程的25 MHz內(nèi)部振蕩器,功耗和成本控制得很低,完全滿足標簽的低端控制。RFID模塊選用NORDIC公司生產(chǎn)的nRF2401芯片,其工作于2.45 GHz開放 ISM 頻段。在 ShockBurstTM模式下,最高傳輸速率達到1 Mbit/s;內(nèi)置硬件CRC檢錯和點對多點通信地址控制,是高效GMSK調(diào)制;抗干擾能力強,特別適用于工業(yè)控制場合。APR9600芯片是一款采用模擬存儲技術的新型語音芯片,其音質(zhì)好、噪聲低、不怕斷電、可反復錄放,單片可錄放32~60 s,并行控制最大可分8段。通過單片機I/O,可控制不同段放音。事先須在芯片內(nèi)錄制好報警錄音“前方有阻礙路況,請減速慢行”。
單片機和nRF2401使用的都是3.3 V電壓供電,APR9600芯片使用5 V供電,因此系統(tǒng)通過AMS1117芯片將接入的直流電轉化為穩(wěn)定的需求電壓。單片機通過 P1.0、P1.1、P1.2分別與 nRF2401 的 POWER-UP、CE、CS相連,控制nRF2401的工作、配置、待機、掉電4種模式的選擇。P1.5與 nRF2401 的 DATA 相連,P1.4產(chǎn)生數(shù)據(jù)傳輸時序給CLK1,控制DATA腳的數(shù)據(jù)發(fā)射和接收。當nRF2401做好數(shù)據(jù)接收準備時,DR1產(chǎn)生中斷信號給單片機,提醒單片機接收數(shù)據(jù)。P0.0為車速采集端口,可采集機動車自身的速度傳感器信號[7]。P0.7控制 APR9600語音報警。APR9600芯片中的其他外圍電路用于對芯片進行錄、放音及測試等操作。當載有電子標簽的機動車通過讀寫器終端單元的識別范圍時,單片機將車輛身份信息(車牌號碼、車型、車速等)等通過nRF2401無線發(fā)送給讀寫器單元。
2.2 讀寫器終端單元硬件設計
終端單元由RFID讀寫模塊、USB攝像頭和WiFi模塊等組成。利用ARM9處理器搭建嵌入式Linux系統(tǒng),加載RFID模塊和USB攝像頭,能快速融合電子標簽和視頻圖像信息,并通過WiFi模塊無線上傳至Web服務器。讀寫器終端單元組成框圖如圖3所示。
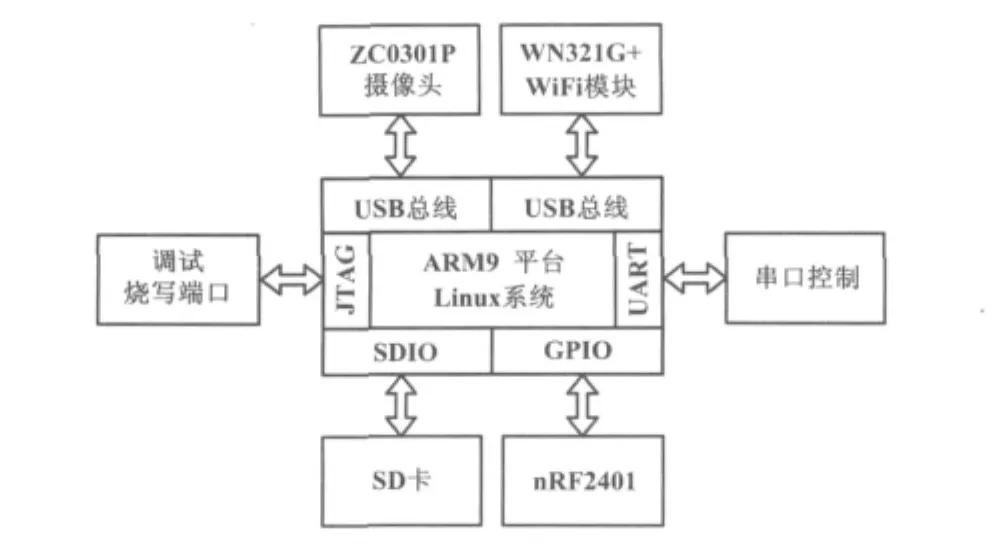
圖3 讀寫器終端單元組成框圖Fig.3 The composition of the reader/writer terminal unit
CPU選用三星S3C2440A,它是基于ARM920T核心、0.13 μm的CMOS標準宏單元和存儲單元。其具有低功耗、簡單、精致以及全靜態(tài)設計等優(yōu)點,特別適用于對成本和功率敏感型的應用。S3C2440A集成了豐富的片上功能,包括3通道UART、2通道SPI、2通道USB主機以及1通道USB設備等[8]。搭建的嵌入式Linux平臺支持多種硬件驅動。圖像采集模塊選用中微星ZC0301型攝像頭,其主要具備圖像處理能力,能確保圖像數(shù)據(jù)壓縮和圖像傳輸在片內(nèi)進行,并通過USB總線與CPU相連。WiFi模塊選用TP-LINK WN321G+模塊,其最大傳輸速率可以達到54 Mbit/s,在室外的最大傳輸距離為300 m。nRF2401模塊通過GPIO口與CPU連接,可通過GPIO口模擬SPI總線,實現(xiàn)nRF2401數(shù)據(jù)的最大速度傳輸。SD卡用于大量數(shù)據(jù)的暫存。
3 系統(tǒng)軟件設計
系統(tǒng)每一個部分都有相應的軟件設計,包括電子標簽、讀寫器終端單元和Web服務器構建的軟件設計。各軟件獨立運行于各自的模塊中,但又相互依存、不可分割,形成一整套軟件系統(tǒng)。
3.1 電子標簽軟件設計
電子標簽主要實現(xiàn)車輛信息發(fā)送及聲光報警功能。該部分采用Keil C開發(fā)。系統(tǒng)上電后,首先對單片機進行初始化,將nRF2401設置為接收模式,循環(huán)等待讀寫器信號。每一個nRF2401芯片都可以最多設置5個字節(jié)長度的地址,只有地址匹配時才可進行數(shù)據(jù)收發(fā)。當安裝有電子標簽的機動車經(jīng)過讀寫器站點工作區(qū)域時,會接收到站點發(fā)來的信息。如果是路況信息,則啟動聲光報警;否則配置nRF2401為發(fā)送模式,自動打包地址和要發(fā)送的數(shù)據(jù)并計算循環(huán)冗余校驗碼(CRC)。通過控制CE腳使能nRF2401的工作模式,循環(huán)發(fā)送標簽內(nèi)的信息。電子標簽軟件流程如圖4所示。
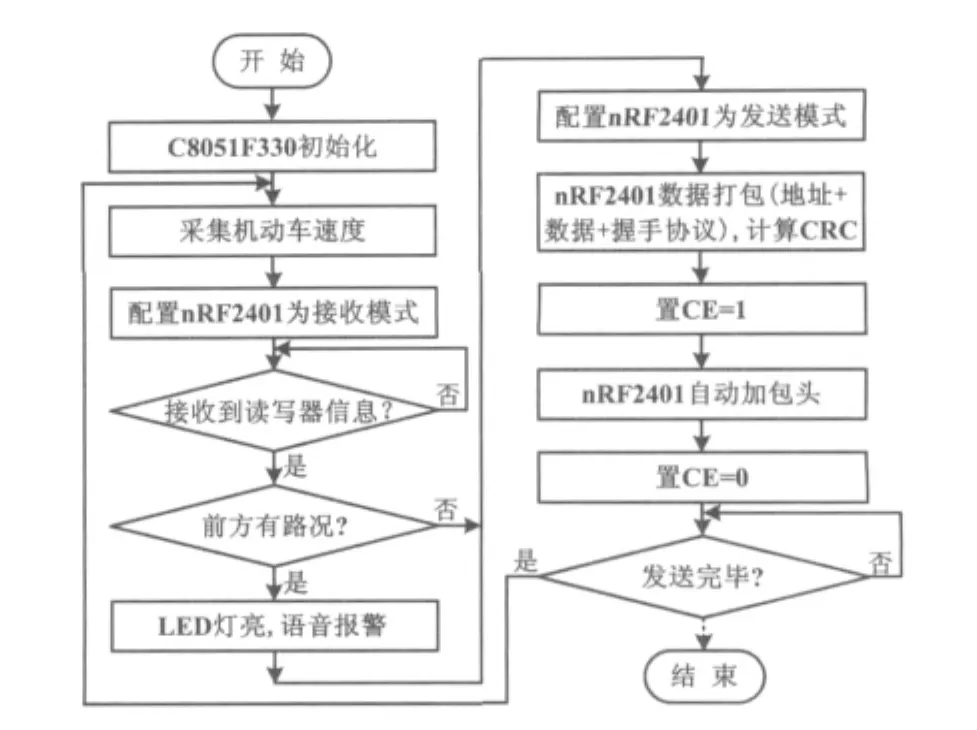
圖4 電子標簽軟件流程Fig.4 The software flowchart of electronic tag
nRF2401一次性發(fā)送的數(shù)據(jù)包長度不能超過32 B,除去5 B地址碼和1 B CRC校驗,一次傳輸?shù)淖畲髷?shù)據(jù)長度為26 B。根據(jù)國家道路交通技術規(guī)范[9-10],機動車號牌的內(nèi)容包括:數(shù)字0~9;字母A~Z;省、自治區(qū)、直轄市簡稱31個;軍隊用漢字11個;號牌分類用漢字9個;號牌顏色4種。nRF2401傳輸?shù)氖嵌M制數(shù),所以將漢字和字母按順序編排,例如漢字“蘇”在規(guī)范中排列為第十位,即用十六進制數(shù)0x0A代替,字母“G”即用十六進制數(shù)0x10代替。車型為固定編號,如大眾速騰編號為D1。定義電子標簽發(fā)送的數(shù)據(jù)幀格式為幀頭(BB BB)+地區(qū)+車牌(牌號、顏色)+車型+車速+和校驗+幀尾(ED),其中校驗位為除幀頭和幀尾外所有數(shù)據(jù)的累加和取后兩位。例如車牌為蘇FE2196的大眾速騰款機動車以24 km/h的速度行駛過某一站點時,車載電子標簽發(fā)送的數(shù)據(jù)幀為BBBB0A0F0E0201090601D11823ED。
3.2 讀寫器終端單元軟件設計
讀寫器終端單元需完成的主要任務有:①采集電子標簽發(fā)來的車輛信息,有效拍攝車輛圖像數(shù)據(jù),快速融合標簽和圖像數(shù)據(jù)并上傳至遠端服務器;②接收服務器發(fā)來的前方路況信息,并及時向工作范圍內(nèi)的機動車電子標簽廣播。該部分軟件利用嵌入式Linux系統(tǒng)的GNU C開發(fā)。
嵌入式 Linux系統(tǒng)對 ZC0301型 USB攝像頭、WN321G+型WiFi模塊以及SD卡等都具有很好的驅動支持。通過make menuconfig進入Linux配置菜單,將相關的設備配置為內(nèi)核模塊,并將其燒入開發(fā)板中。修改開發(fā)板系統(tǒng)的/etc/init.d/rcS文件,將相關的設備驅動設置為開機加載。讀寫器系統(tǒng)具體的工作流程如圖5所示。
應用程序采用多線程編程和永久循環(huán)結構。首先打開nRF2401和攝像頭設備,攝像頭驅動中定義了V4L2接口,并將其封裝為一個結構體來描述攝像頭信息。應用程序通過ioctl完成圖片的讀取等操作。接著設置視頻的格式、數(shù)據(jù)流類型以及視頻的高度和寬度,并設置視頻源的格式為JPEG。然后申請幀緩沖區(qū),使用mmap函數(shù)將申請的緩存地址轉換為應用程序的絕對地址。打開網(wǎng)卡設備,判斷服務器有沒有發(fā)送路況報警信息,接著啟用RFID模塊等待接收標簽發(fā)來的信息。一旦信息傳來,觸發(fā)攝像頭獲取10幀圖像,拍攝的圖片通過TCP套接字發(fā)送到遠端服務器。每一個請求均創(chuàng)建一個單獨的線程與之通信。
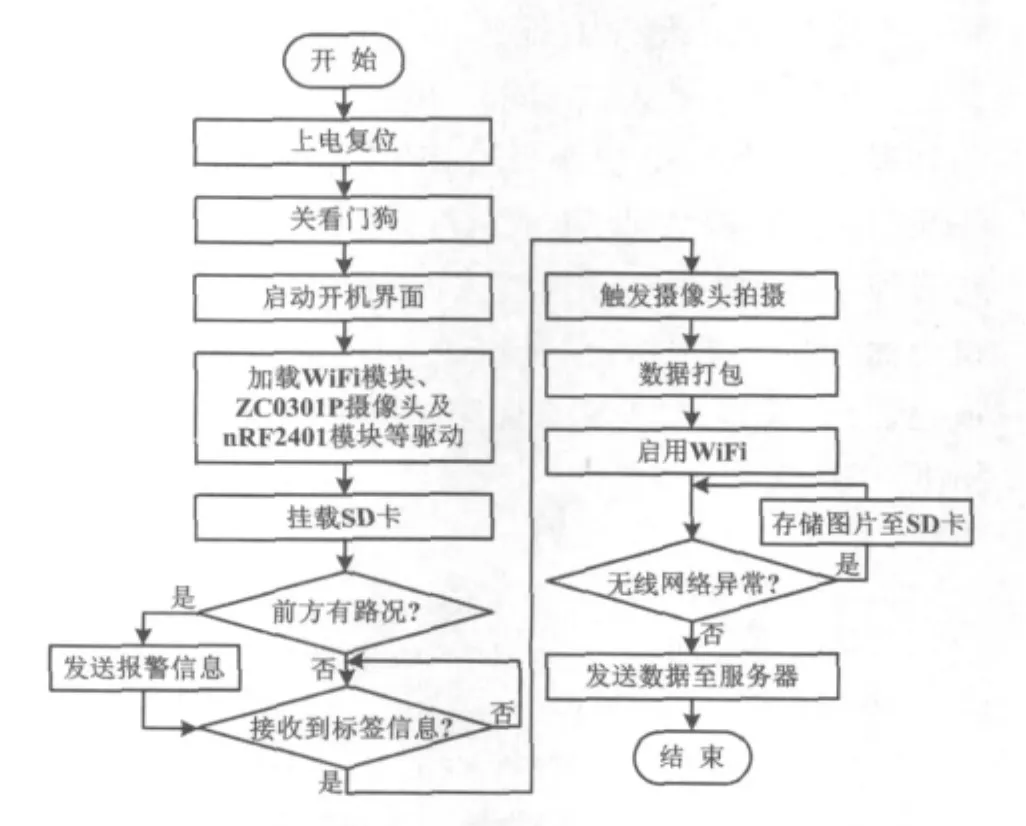
圖5 讀寫器終端單元工作流程Fig.5 The work flow of the reader/writer terminal unit
為防止多輛機動車同時進入讀寫器工作范圍而產(chǎn)生數(shù)據(jù)沖突,在同一秒內(nèi),每一個電子標簽僅觸發(fā)存儲10張圖片。如果讀寫器判斷繼續(xù)檢測到同一標簽信息,便不予接收和觸發(fā)拍攝,直至檢測到不同的標簽信息。
將電子標簽發(fā)來的車輛信息作為此刻采集的機動車圖片的文件名。一旦圖像存入數(shù)據(jù)庫中,上位機軟件便可進行查詢。軟件通過Linux時間函數(shù)取得當前時刻融合標簽信息和圖片序號,并將其作為圖片文件名,此時該車經(jīng)過該站點的圖像在數(shù)據(jù)庫中有且僅有10張。主要程序如下。
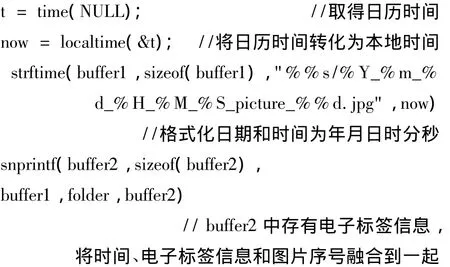
此處定義的圖片名格式為時間(年、月、日、時、分、秒)+picture+圖片序號+車輛信息(車牌、車型、車速)。根據(jù)上述例子,讀寫器采集到的機動車圖片名為2011_08_23_14_42_19_picture_(01~09)_0A0F0E0201090601D118.jpg
3.3 Web服務器管理網(wǎng)站設計
Web服務器采用Windows XP SP3操作系統(tǒng),該系統(tǒng)安裝有IIS5.0服務器;數(shù)據(jù)庫軟件選用 Microsoft Access 2003。Web服務器軟件組成如圖6所示。
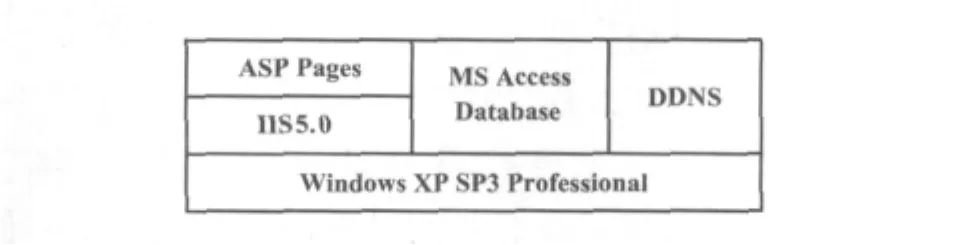
圖6 Web服務器軟件組成Fig.6 Software composition of the Web server
網(wǎng)站采用Dreamweaver CS5軟件開發(fā),利用本地數(shù)據(jù)源名稱(DSN)創(chuàng)建Access數(shù)據(jù)庫鏈接;將圖片文件夾的絕對路徑保存在Access數(shù)據(jù)庫中,以實現(xiàn)圖片的保存和查詢。網(wǎng)站系統(tǒng)由公共模塊、前臺瀏覽模塊和后臺管理模塊3部分組成,其主要功能包括:用戶登錄查詢、圖片管理、站點流量統(tǒng)計以及前方路況發(fā)布等。網(wǎng)站系統(tǒng)如圖7所示。
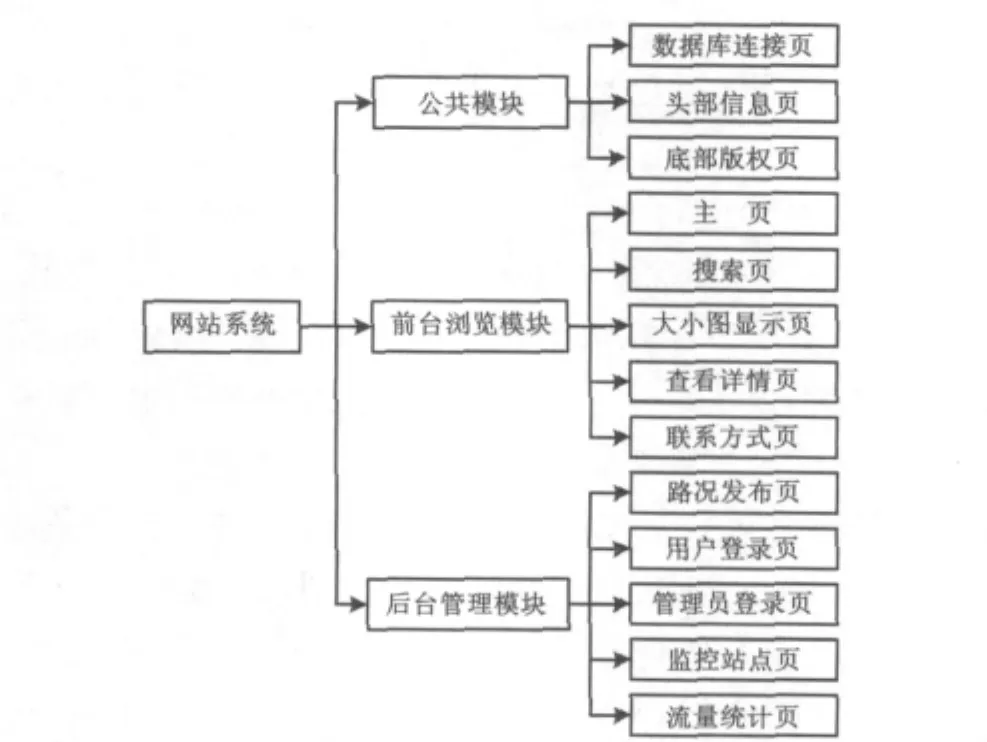
圖7 網(wǎng)站系統(tǒng)Fig.7 The web site system
服務器采用DDNS技術將分配到的動態(tài)IP地址映射為固定的域名,可節(jié)省租用固定IP地址的費用。網(wǎng)站運行時,管理員可通過接收到的電子標簽參數(shù)與圖像參數(shù)進行對照。當兩種參數(shù)的車輛信息不一致時,可采取相應措施對其進行管理和排查。
4 試驗
在復雜多變的無線環(huán)境中,RFID系統(tǒng)會受到各種通信信道時變、衰落和其他無線設備信號的影響,RFID系統(tǒng)間的數(shù)據(jù)傳輸難免出現(xiàn)誤碼及丟失等現(xiàn)象[11]。為測試系統(tǒng)車輛身份識別準確率,對nRF2401進行了誤碼率和抗干擾性能監(jiān)測試驗。
4.1 識別率試驗
在保證環(huán)境較好的情況下,利用C8051F330單片機,嚴格按照nRF2401芯片手冊的工作時序編寫一段程序,循環(huán)控制nRF2401,每10 ms發(fā)送一次128 bit的固定數(shù)據(jù)包(包括字頭、地址位、信息碼和CRC校驗碼)。在不同發(fā)射功率、不同發(fā)射速率和不同傳輸距離下發(fā)送10000次數(shù)據(jù)包,以計算nRF2401的數(shù)據(jù)傳輸誤碼率。讀寫器一旦接收到錯誤的信息碼,誤碼計數(shù)加1;每超過20 ms沒有接收到數(shù)據(jù),視為丟包,誤碼計數(shù)加1。得到的數(shù)據(jù)誤碼率如表1所示。
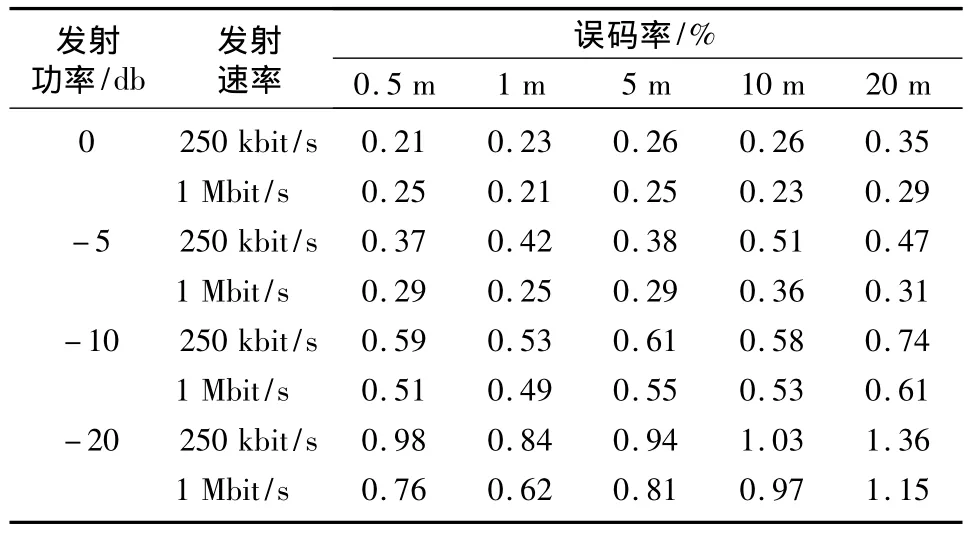
表1 不同條件下數(shù)據(jù)誤碼率Tab.1 Data bit error rates in deferent conditions
從表1可以看出:當發(fā)射功率較大和發(fā)射速率較快時,系統(tǒng)的數(shù)據(jù)誤碼率較小;0~20 m內(nèi)整體誤碼率小于等于2%,說明識別準確率可達到98%以上。
4.2 抗干擾性能試驗
抗干擾試驗是在數(shù)據(jù)誤碼最小的條件下進行的。試驗方法是:利用C8051F330單片機,配置nRF2401的發(fā)射功率為0 db、發(fā)射速率為1 Mbit/s,循環(huán)發(fā)送數(shù)據(jù)00~FF,查看在各種惡劣條件下系統(tǒng)的抗干擾性能。此間接收到的錯誤數(shù)據(jù)屬于誤碼,應該去除。系統(tǒng)的抗干擾情況如表2所示。
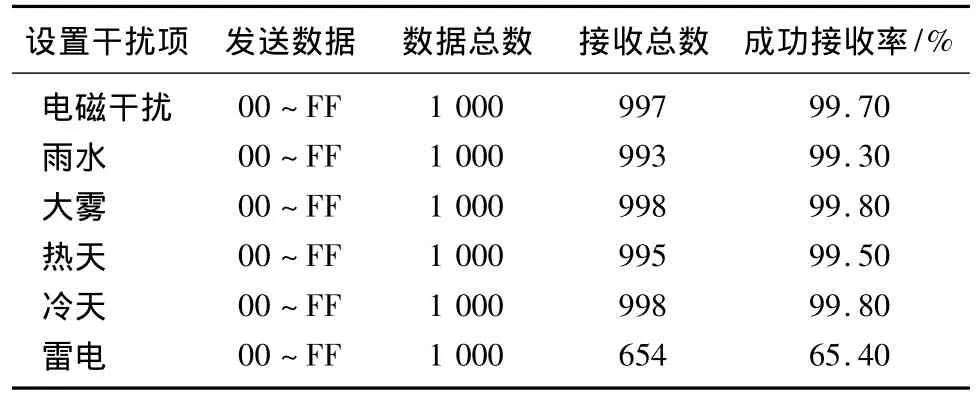
表2 抗干擾測試數(shù)據(jù)Tab.2 Anti-interference test data
從表2中的數(shù)據(jù)可以看出,在電磁、天氣等環(huán)境影響下,系統(tǒng)具有較好的抗干擾性能;而在雷電情況下,系統(tǒng)受到的干擾較大,在實際應用中應注意安裝防雷電設備。
5 結束語
本文研究了一種集成RFID和視頻的車輛識別及管理系統(tǒng)。選用高性價比的C8051F330單片機設計了車載電子標簽,并將機動車物理參數(shù)(車牌、車型等)信息直接存儲在標簽內(nèi),標簽主動循環(huán)發(fā)送車輛參數(shù)信息。系統(tǒng)基于嵌入式Linux平臺,以三星S3C2440A為處理器,加載USB攝像頭和RFID模塊,構成讀寫器終端單元。試驗表明,集成RFID和視頻的車輛識別與管理系統(tǒng)在0~20 m內(nèi)整體識別準確率可達98%,抗干擾性好。該系統(tǒng)可與現(xiàn)有的智能交通管理系統(tǒng)集成,從而有效提高單純的視頻車輛監(jiān)測技術的識別精度。
[1]Chang S L,Chen L S,Chung Y C,et al.Automatic license plate recognition[J].IEEE Transactions on Intelligent Transportation System,2004,5(1):42-53.
[2]Anagnostopoulos C N E,Anagnostopoulos I E,Loumos V,et al.A license plate-recognition algorithm for intelligent transportation system applications[J].IEEE Transactions on Intelligent Transportation System,2006,7(3):377-392.
[3]周濤,張繼業(yè).視頻圖像的車輛檢測與識別[J].計算機工程與應用,2011,47(19):166-169.
[4]Germa T,Lerasle F,Ouadah N,et al.Vision and RFID data fusion for tracking people in crowds by a mobile robot[J].Computer Vision and Image Understanding,2010,114(6):641-651.
[5]Wen W.An intelligent traffic management expert system with RFID technology[J].Expert Systems with Applications,2010,37(4):3024-3035.
[6]趙泰洋,郭成安,金明錄.一種基于RFID原理的交通信息獲取系統(tǒng)與車輛定位方法[J].電子與信息學報,2010,32(11):2612-2617.
[7]邱自學,嚴奎,袁江,等.基于RFID的機動車速度智能監(jiān)測方法及實驗[J].武漢理工大學學報:自然科學版,2011,33(9):61-66.
[8]楊水清,張劍,施云飛,等.ARM嵌入式Linux系統(tǒng)開發(fā)技術詳解[M].北京:電子工業(yè)出版社,2008:17-105.
[9]公安部道路交通管理標準化技術委員會.GA/T 833-2009機動車號牌圖像自動識別技術規(guī)范[S].北京:中國標準出版社,2009.
[10]公安部道路交通管理標準化技術委員會.GA/T 497-2009公路車輛智能監(jiān)測記錄系統(tǒng)通用技術條件[S].北京:中國標準出版社,2009.
[11]Shih D H,Sun P L,Yen D C,et al.Taxonomy and survey of RFID anti-collision protocols[J].Computer Communications,2006,29(11):2150-2166.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
電子設計工程(2015年15期)2015-02-27 12:07:30
中外會展(2014年4期)2014-11-27 07:46:46
