伺服放大器設計與仿真分析
2012-07-26 06:08:08李玲瓏霍良青張奇峰
自動化儀表 2012年12期
李玲瓏 霍良青 張奇峰 孫 斌
(機器人學國家重點實驗室中國科學院沈陽自動化研究所1,遼寧 沈陽 110016;中國科學院研究生院2,北京 100039)
0 引言
隨著電液伺服控制技術的迅速發展,作為輔助設備,電液伺服閥的應用范圍也不斷擴展,覆蓋從民用機械到精密航天設備等關鍵國民經濟領域[1]。然而,在實際的電液伺服控制系統中,由于傳感器采集的信號比較微弱,導致控制器輸出功率低,不能直接驅動后續電液伺服閥,因此,在控制器與電液伺服閥之間需配用伺服放大器,將弱電信號放大成強電信號來控制電液伺服閥。伺服放大器主要由兩部分組成,前置級為電壓放大電路,功率級為電流負反饋放大電路。伺服放大器的作用是將偏差電壓信號(輸入指令電壓信號與系統反饋電壓信號比較所得)加以運算和放大,輸出一個與偏差電壓信號呈一定函數關系的控制電流;將電流輸入伺服閥力矩馬達線圈,以驅動電液伺服閥[2],從而控制閥芯開口度大小,起到限幅保護作用。
1 伺服放大器設計
1.1 設計要求
1.2 電路設計
伺服放大器主要電路包括:調零電路、前置放大電路、跟隨電路、震顫信號發生電路和功率放大電路,整個放大器的結構如圖1所示。
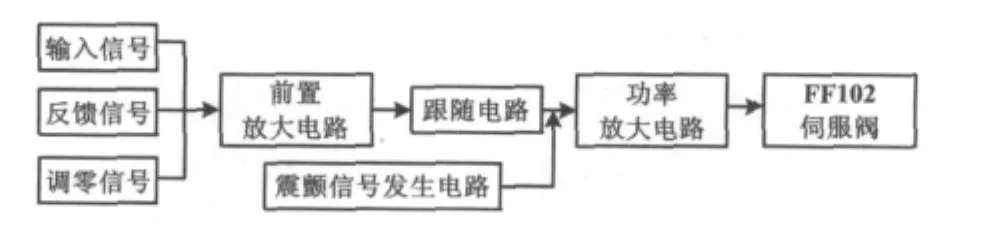
圖1 伺服放大器電路結構框圖Fig.1 Block diagram of the structure of servo amplifier circuit
①調零電路。通過在前置端疊加可調電壓,調節電路基準電壓[4]。由于工作環境的變化,當輸入力矩馬達線圈電流為零時,電液伺服閥可能會產生一個較小的流量輸出,降低了伺服控制系統的穩態精度。通過調節電位計R1進行零點補償,可以有效克服電液伺服閥零漂的影響,提高系統性能。
伺服放大器各功能模塊的電路原理如圖2所示。
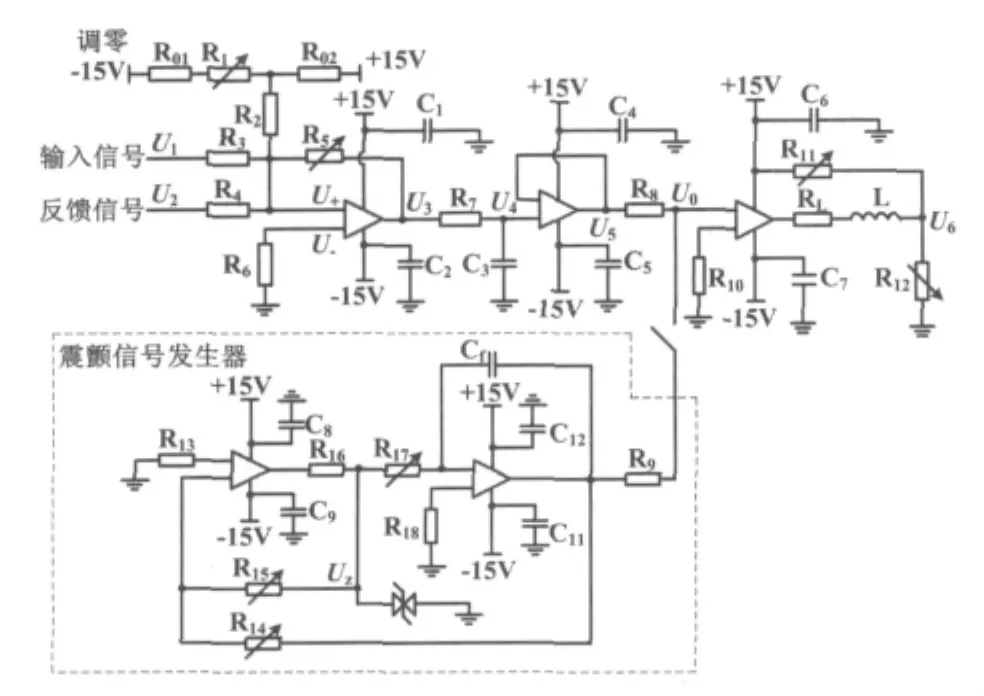
圖2 伺服放大器電路原理圖Fig.2 Schematic diagram of the servo amplifier circuit
②前置放大電路。將輸入指令信號和反饋信號比較所得偏差信號進行運算放大。電路中U1和U2分別為輸入信號和反饋信號。通過調節電位計R2改變電路的電壓增益,以適應后續功率放大電路的需要。
③跟隨電路。由于電壓跟隨器的輸入阻抗高、輸出阻抗低[5],因此,其對前置放大電路等效為開路,對功率放大電路等效為一個恒壓源,有效實現了兩級電路隔離,使得前置放大電路輸出電壓不受后級功率放大電路阻抗變化的影響,保持了電路的穩定性。即使出現大偏差信號,電壓跟隨器最大輸出電壓始終小于電源電壓15 V,確保了放大器輸出電流始終小于2倍的電液伺服閥額定電流,實現了電路限流保護。
④震顫信號發生電路。由于電液伺服閥中閥芯與閥套間存在一定的靜摩擦力[2],使得電液伺服閥存在一定大小的分辨率。當輸入電流的變化值小于電液伺服閥的分辨率時,閥輸出流量不變。為了改善電液伺服閥的特性,在電液伺服閥的輸入信號中疊加電流震顫信號[6],信號頻率為 100 ~400 Hz,峰-峰值為 10% ~ 20%的閥額定電流。根據三角波信號發生器的原理分析[5],該電路中信號頻率f=(CfR17R14)(4UZR15),峰-峰值A=4UZR15R14,其中UZ為穩壓管穩定電壓。這樣便可以調節電位計R14、R15和R17獲得滿意的震顫信號,減小摩擦力對閥的干擾,消除卡澀現象[2]。該電路只在閥響應不穩定的情況下才接入電路。
⑤功率放大電路。功率級放大電路是伺服放大器的核心部分[7],其將輸入的電壓信號轉化為恒流電流信號輸出,輸出電流大小不受電液伺服閥線圈阻抗變化影響[8],始終與偏差信號電壓呈一定函數關系,保證電路輸出足夠的功率,以驅動負載。
1.3 電路相關計算
如圖2所示前置放大電路,設輸入信號為U1,反饋信號為U2,輸入電阻R2=R3=R4,根據理想運算放大器的反饋原理,有:

式中:I3=(U1-U+)/R3、I4=(U2-U+)/R4和 I5=(U+-U3)/R5分別為通過電阻R3、R4和R5的電流,從而可得:
課堂預習對于課堂學習的效率有著很大的影響.在高中數學學習中,為了更好地融會貫通課堂之上教師所講的,要求高中生在數學課堂之前,對教材有一個初步的了解.因此,教師在數學教學過程中,在前期強制要求學生要課前預習,帶著問題上課堂,并且將每節課的預習成果用文字表示出來,好記性不如爛筆頭,一是為了督促學生養成課前預習的習慣,二是為了讓學生對即將課堂所學的教學內容有初步的認識與了解,加深自己對數學知識的印象.

根據跟隨電路原理,輸入阻抗無窮大,可得:U3=U4=U5。對于功率放大電路部分,為了使功率級輸出電流與輸入電壓信號呈線性關系,采用電阻R12與電液伺服閥線圈串聯,并將線圈上的電壓經電阻R11反饋到放大器的反相輸入端。由于反饋電壓是由電流產生的,因此該放大器被稱為電流負反饋放大器[6]。引入電流負反饋以后,相對負載變動,伺服放大器趨向于恒流源。輸入電阻R8=R9,根據理想運算放大器的反饋原理可以得到:

由基爾霍夫定律、歐姆定律可知:

式中:I11、I12和IL分別為通過電阻R3、R4和負載線圈的電流,綜合式(2)~(4)可以得到疊加輸入信號與負載電流的線性關系式為:

2 伺服放大器電路特性分析
2.1 OrCAD10.5 仿真軟件介紹
Cadence公司的OrCAD軟件是世界上應用最廣的EDA軟件之一,它集成了電路原理圖繪制、印制電路板設計、數字/模擬電路仿真、可編程邏輯器件設計等功能[9-10]。它為用戶提供了一個龐大的元器件數據庫,利用庫中元器件對設計的電路進行直流分析、交流小信號分析、瞬態分析和蒙特卡羅分析及最壞情況分析等仿真,結果與理論計算非常接近。
2.2 電路特性分析
根據電路原理圖,在OrCAD軟件中建立模擬電路模型,對設計電路進行仿真分析。為了減小放大電路電源電壓的波動對閥的影響,提高閥的靈敏度,電液伺服閥的兩組線圈采用差動工作方式[8]。仿真時,線圈可以等效為由電阻RL=700 Ω和電感L=3 H串聯組成的感性阻抗。
2.2.1 線性特性
未加入震顫信號時,伺服放大電路輸出±10 mA電流的直流掃描分析仿真示意圖如圖3所示。由圖3可知,當偏差信號在±10 V范圍內變化時,輸入電壓與輸出電流呈嚴格的線性變化。
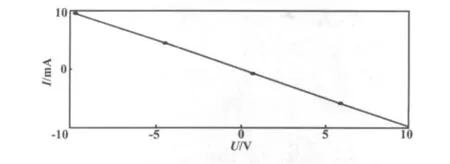
圖3 輸入電壓與輸出電流直流掃描仿真Fig.3 DC sweep simulation of input voltage and output current
2.2.2 頻率特性
在未接入震顫信號下,分別進行輸出±10 mA電流下的電路交流小信號分析,如圖4所示。從圖4可以看出,在一定的頻率范圍內伺服放大電路的輸出恒定,當頻率繼續增大到一定值時出現峰值,而后迅速衰減。該電路頻帶較寬,對伺服閥的動態影響非常小,完全滿足設計要求。
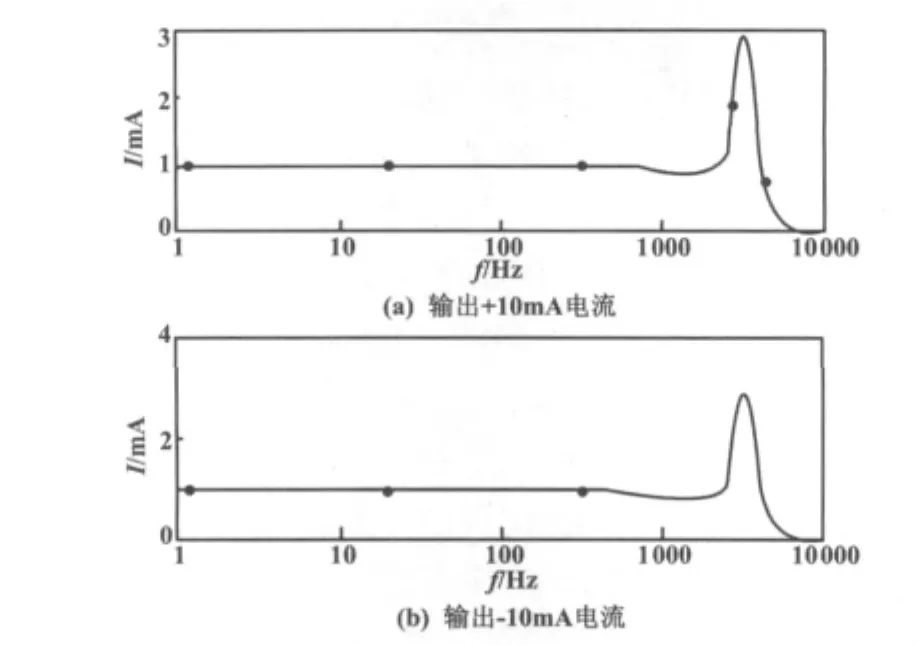
圖4 輸出電流的交流小信號分析圖Fig.4 Current analysis of AC small-signal output
2.2.3 時域特性
對輸出±10 mA伺服放大器電路進行瞬態分析。當輸入電壓為±10 V時輸出電流的波形如圖5所示。由圖5可以看出,此放大電路響應迅速、電流穩定。
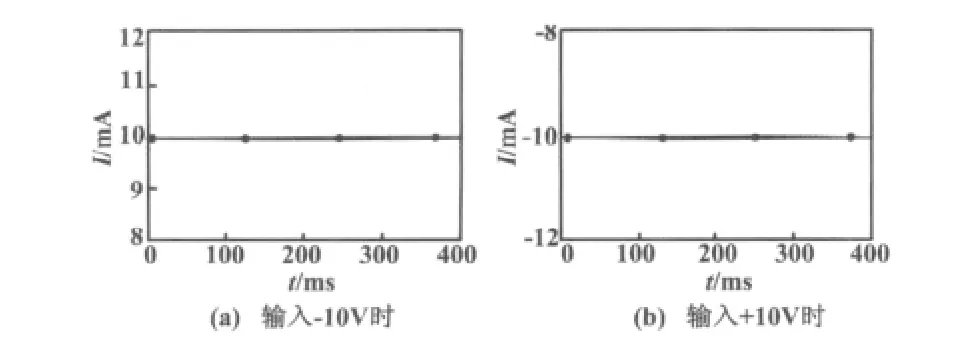
圖5 輸出電流波形Fig.5 Output current waveforms
3 伺服放大器電路特性分析
將伺服放大器電路制成PCB樣板,在放大器輸出端與電阻RL之間連入電流表。輸入-10~+10 V之間的階躍電壓信號時,輸出電流隨時間有緩慢變化(運算放大器的溫漂等因素影響)[6],且與輸入電壓呈比例關系,測試結果與仿真計算完全符合。測試得到的電液伺服閥輸入電壓和輸出電流數據如表1所示。
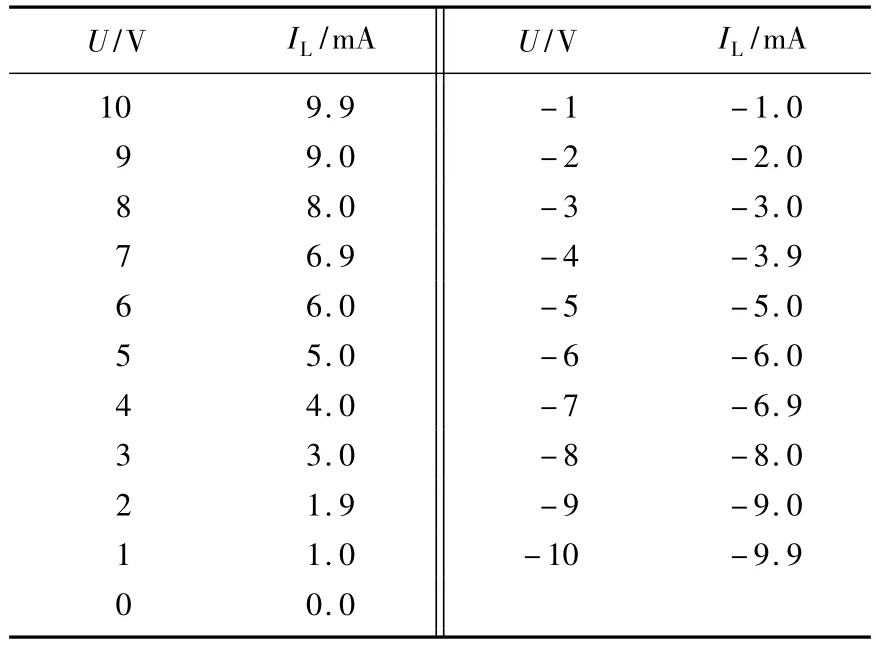
表1 伺服放大電路輸入輸出數據Tab.1 Input and output data of the servo amplifier
4 結束語
采用電路仿真軟件OrCAD對伺服放大器電路建模,并進行了線性特性、頻域特性和時域特性分析,為電路的設計、元件的選擇提供了理論依據,使得伺服放大器的研發周期縮短,性能得到改善。測試結果表明,系統輸出電流穩定、線性度好、響應迅速,滿足FF102電液伺服閥驅動的需要,具有實際的工程應用價值。
[1]楊逢瑜.電液伺服與電液比例控制技術[M].北京:清華大學出版社,2009.
[2]梁利華.液壓傳動與電液伺服系統[M].哈爾濱:哈爾濱工業大學出版社,2005.
[3]董選明,裘麗華.基于LH0041的伺服電流放大器電路設計[J].電子技術應用,1998(7):30-32.
[4]周恩濤.伺服放大器的設計及特性仿真[J].機床與液壓,2006(2):113 -115.
[5]秦曾煌.電子技術[M].5版.北京:高等教育出版社,1999.
[6]謝小平.伺服功率放大器的設計[D].成都:電子科技大學,2007.
[7]紀亞非,錢康,宋江斌.多功能高品質伺服放大器的設計[J].工業儀表與自動化裝置,2006(1):54-56.
[8]李言軍.電液伺服/比例放大器的研究[D].杭州:浙江大學,2007.
[9]劉湲.Pspice電路設計與實現[M].北京:國防工業出版社,2005.
[10]盧云丹,陳新元,曾良才.基于Multisim的伺服放大器的特性分析[J].儀表技術,2007(10):43-44.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
