基于DSP+CPLD的四電動舵機伺服控制器設計
2012-07-23 06:37:18米月星
微特電機 2012年8期
米月星 ,林 輝,李 志
(西北工業大學,陜西西安710129)
1四舵機伺服控制系統
舵機作為現代飛行器的伺服執行機構,對其質量、體積以及控制性能都提出了更高的要求[1-2]。舵機伺服系統分為四個獨立的通道,分別完成對四個舵面的控制。每個通道由舵機本體和伺服控制器組成。四舵機伺服控制系統結構框圖如圖1所示。伺服控制器接收制導計算機的的位置信號給定,控制四臺舵機按照給定的位置信號做相應的作動,控制各舵面的角度變化。
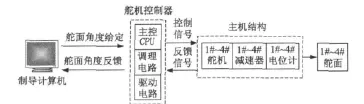
圖1 四舵機伺服控制系統
2 12路霍爾信號的捕獲
本系統中,霍爾信號同時送至DSP和CPLD。CPLD通過電機三相霍爾信號的邏輯運算產生PWM控制信號,DSP通過霍爾信號的捕獲計算得知電機的轉速作為速度環的回饋信號。電機的轉速信號由霍爾信號回饋得知。單個DSP有6個CAP管腳,而四臺電機共有12路霍爾信號需要捕獲。單純依靠DSP的CAP管腳無法實現對12路霍爾的捕獲。這就需要CPLD將每三路霍爾信號異或,將異或信號送至DSP的CAP口。0~360°的電角度范圍內,三相霍爾及其異或信號如圖2所示。
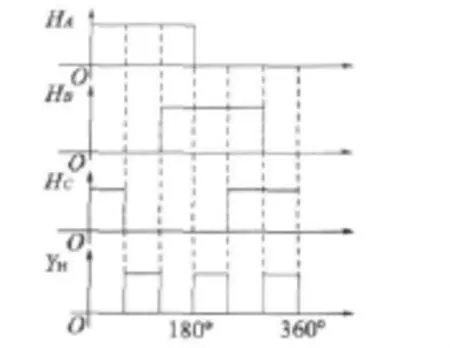
圖2 三相霍爾及其異或信號
圖 2 中,HA、HB、HC分別為一臺電機的三相霍爾信號,YH為其異或信號。由圖2看出,每相霍爾的上升或下降均能導致YH高低電平的變化。這樣通過捕獲YH信號的上升沿和下降沿,就能確定三相霍爾電平跳變的時刻。采用M法測速,在一定的時間T內,測取YH信號的脈沖個數M,從而得到電機的轉速。這樣,一臺電機三相霍爾信號跳變的捕獲可由一個CAP管腳完成,4個CAP管腳即可完成對12路霍爾信號跳變的捕獲,并由此計算出四臺電機的轉速。
3 PWM信號的產生
單個DSP的EVA全比較單元PWM電路可以產生12路PWM,實現對兩臺電機的調速控制,無法滿足四舵機伺服系統的控制要求。另一方面,DSP控制無刷直流電動機的起停和換相時,要進行大量的邏輯運算,就要占用大量的CPU資源,會大大影響CPU的工作效率[4]。無論是對四臺舵機的控制要求,還是對系統的控制響應速度,都必須借助CPLD高速的邏輯運算能力。DSP完成AD采集、PID運算以及中斷管理,CPLD完成多路PWM的產生以及實時保護的功能。系統選用EPM1270來完成多路PWM波的產生。DSP與CPLD的接口電路示意圖如圖3所示。
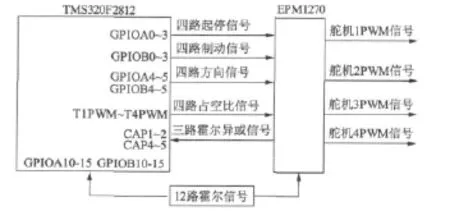
圖3 DSP與CPLD的接口電路示意圖
圖3中,四臺電機的起停、制動、方向信號由DSP的I/O口輸出,占空比通過通用定時器的比較操作產生的T1PWM~T4PWM確定,CPLD將這幾路信號與12路霍爾信號進行邏輯運算,輸出四臺舵機的PWM控制信號。
4軟件設計
4.1 DSP 功能設計
DSP主要完成控制算法的計算和時間管理的功能,是系統的核心部分。系統采用位置環+速度環+電流環的死循環控制策略,死循環控制均采用PID算法。系統軟件設計流程圖如圖4所示。
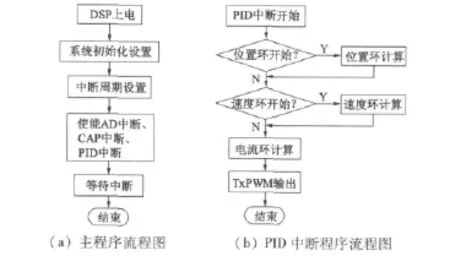
圖4 系統軟件設計流程圖
圖4(a)中,AD中斷程序完成對電流傳感器、電位計以及角度給定的采樣;CAP中斷程序完成對12路霍爾信號的捕獲,并計算得出電機轉速;PID中斷完成PID控制算法。圖4(b)中,將電流環的計算結果賦值給TxCMPR,實時改變占空比的大小,并通過TxPWM管腳將占空比送至CPLD。
4.2 CPLD 程序設計
CPLD的功能是把DSP的控制使能信號與霍爾信號進行邏輯運算,輸出PWM控制信號。當接收到硬件保護信號時,關閉PWM輸出,實時保護系統的正常工作。
在Quartus II集成開發工具中建立仿真波形,可以驗證系統的有效性。電機換相邏輯信號仿真波形如圖5所示。
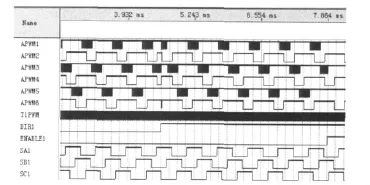
圖5 電機換相邏輯信號仿真波形
圖5中,APWM1~APWM6為舵機1的PWM控制信號,T1PWM、DIR1、ENABLE1分別為舵機1的占空比、方向和使能信號,SA1、SB1、SC1為舵機1的三相霍爾位置信號。程序上采用“上斬下不斬”的控制方法[5],即上橋臂輸出的是斬波信號,下橋臂輸出的是高低電平。當ENABLE1為低電平時,CPLD由各路信號進行邏輯運算,正常輸出控制信號,當ENABLE1為高電平時,舵機1不使能,CPLD關閉PWM控制信號輸出。
5實驗結果
位置控制信號由導航計算機給定,位置信號由電位計回饋得知,速度信號由霍爾信號計算得出,母線電流由電流傳感器ACS712回饋。電機在30%的占空比下運行時,DSP的CAP管腳捕獲波形如圖6所示。
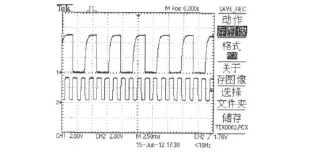
圖6 CAP管腳的捕獲波形
圖6中,上圖是A相霍爾信號,下圖是三相霍爾的異或信號。可以看出,在0~360°的電角度范圍內,異或信號有6個上升沿或下降沿,使得電機的每相霍爾信號的上升或下降均能被DSP捕獲。
電機在30%的占空比下運行時,一個橋臂的PWM波形如圖7所示。
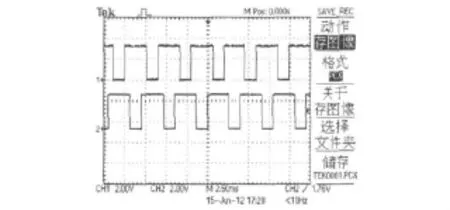
圖7 30%占空比下,一個橋臂的PWM波形
圖7中,PWM控制信號低電平有效,上橋臂為低電平時,下橋臂為高電平,關斷對應的MOSFET開關管。
6結 語
本文設計了一種多舵機伺服控制器,基于單個DSP完成了四臺舵機的伺服控制,系統充分利用了DSP強大的事件管理和浮點運算的能力以及CPLD高速的邏輯運算能力。實驗結果驗證了系統的正常工作。整個系統結構簡單,集成度高,大大減小了系統控制器的體積,也大大提高了系統的可靠性。
[1] 周小慶.高速無人機電動舵機控制器的設計與實現[D].杭州:浙江大學,2010.
[2] 李世民,王新平.電動舵機控制系統設計[J].機械與電子,2011(11):60-63.
[3] Zhang Da,Li Hui.A stochastic-based FPGA controller for an induction motor drive with integrated neural network algorithms[J].IEEE Transactions on Industrial Electronics,2008,55(2):551-561.
[4] 米月星,林輝,高翌陽.天線雙軸穩定平臺伺服控制器的設計和實現[J].微特電機,2011,39(8):35-37.
[5] 劉冠志.基于DSP和CPLD的全電剎車驅動器設計[D].西安:西北工業大學,2010.
[6] 于凱平,郭宏,吳海洋.采用DSP和FPGA多電機速度伺服驅動控制平臺[J].電機與控制學報,2011,15(9):39-43.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
