純電磁軸承自適應(yīng)變偏置電流低功耗控制
2012-07-21 09:26:48郭樹星韓邦成李紅鄭世強(qiáng)
軸承 2012年11期
郭樹星,韓邦成,李紅,鄭世強(qiáng)
(1. 北京航空航天大學(xué) 慣性技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100191; 2. 新型慣性儀表與導(dǎo)航系統(tǒng)技術(shù)國防重點(diǎn)學(xué)科實(shí)驗(yàn)室,北京 100191)
電磁軸承分為永磁偏置混合磁軸承和純電磁軸承兩類。電磁軸承具有無接觸、無摩擦、振動小、噪聲低、無需潤滑及阻尼剛度主動可控等優(yōu)勢[1],雖然具有傳統(tǒng)機(jī)械軸承無可比擬的優(yōu)點(diǎn),但是功耗比較嚴(yán)重,特別是大功率場合,由此引起的發(fā)熱問題也十分嚴(yán)重。減小甚至消除純電磁軸承中偏置電流可以降低系統(tǒng)功耗,這方面的研究已成為熱點(diǎn)[2]。
對于純電磁軸承的研究,國內(nèi)、外很多學(xué)者從控制的角度進(jìn)行了變偏置電流研究。文獻(xiàn)[3]從功率放大器和電磁鐵的角度分析偏置電流對剛度和阻尼影響,提出了低偏置磁通和低偏置電流控制的方法,該方案分析角度較為新穎,但是沒有兼顧控制器方面的影響。文獻(xiàn)[4]通過建立功耗函數(shù),將電壓、電流、力等作為約束條件,求當(dāng)功耗最小時(shí)電流的最優(yōu)解,得出單邊激勵(lì)模式性能變差是因?yàn)殡妷猴柡偷木壒剩⑻岢鲆环N電流的靜態(tài)分配策略。該方案將一個(gè)工程問題轉(zhuǎn)化為一個(gè)數(shù)學(xué)問題,具有一定的廣適性,但是系統(tǒng)設(shè)計(jì)時(shí)考慮邊界條件較多,推導(dǎo)過程復(fù)雜,控制效果也很難達(dá)到最優(yōu)。文獻(xiàn)[5]對控制電流的開關(guān)控制策略進(jìn)行H-∞補(bǔ)償,為非線性設(shè)計(jì)方法,控制復(fù)雜,動態(tài)性能差,對于外部擾動魯棒性不好。文獻(xiàn)[6]將加載偏置電流的方式分為3類:第1種是將偏置電流設(shè)置成線圈允許最大電流的一半,加在相對應(yīng)兩個(gè)線圈上,這種方式動態(tài)性能較好,但是功耗較大;第2種是將偏置電流設(shè)置成很小的值加在單邊線圈上,這種方式功耗較小,但是僅僅適用于剛度低、振動小的情況;第3種采用零偏置電流,該方式非線性嚴(yán)重,控制奇異。
針對實(shí)驗(yàn)室現(xiàn)有高速磁懸浮電動機(jī)中純電磁軸承采用固定偏置電流導(dǎo)致的功耗較大問題,文中采用自適應(yīng)變偏置電流控制方案,就轉(zhuǎn)子懸浮情況、靜態(tài)懸浮功耗和升速功耗與固定偏置電流控制方案進(jìn)行對比。
1 軸承單自由度動力學(xué)建模
電磁軸承結(jié)構(gòu)示意圖如圖1所示。

圖1 電磁軸承結(jié)構(gòu)示意圖
現(xiàn)在僅考慮轉(zhuǎn)子在x方向的運(yùn)動。假設(shè)磁極和轉(zhuǎn)子表面間各處磁感應(yīng)強(qiáng)度相同,且沒有漏磁,由Maxwell電磁理論得到單個(gè)磁極對轉(zhuǎn)子產(chǎn)生的力為
(1)
式中:μ0為真空磁導(dǎo)率;N為磁軸承線圈匝數(shù);S為磁極面積;i1為x軸正向線圈通入的電流;g0為徑向間隙。fx2,fx3,fx4與fx1計(jì)算方法相同。
x正向產(chǎn)生的力為
(2)
式中:γ為相鄰磁極夾角的一半。同樣,fx-與fx+計(jì)算方法相同。
線圈電流i1,i2由兩部分組成:提供偏置磁場的偏置電流ib和提供控制磁場的控制電流ic。當(dāng)轉(zhuǎn)子偏離平衡位置位移為x,線圈中的電流為
(3)
x正、負(fù)向間隙為
(4)
此時(shí)轉(zhuǎn)子在x方向所受力為
(5)
當(dāng)轉(zhuǎn)子懸浮在電磁軸承中心位置時(shí),由小位移線性化方法,上式簡化為[7]
(6)
2 自適應(yīng)變偏置電流控制
為了方便后續(xù)推導(dǎo)和仿真,利用歸一化方法處理,變量均以大寫字母表示。
傳統(tǒng)的PID控制,將偏置電流設(shè)置成固定值功耗較大,PID控制參數(shù)手動調(diào)節(jié)。這里在傳統(tǒng)PID控制基礎(chǔ)之上,采用變偏置電流,同時(shí)對PID控制中比例環(huán)節(jié)進(jìn)行自適應(yīng)控制。
由于磁軸承控制系統(tǒng)開環(huán)不穩(wěn)定,為保證系統(tǒng)的穩(wěn)定性,必須引入轉(zhuǎn)子位移負(fù)反饋,構(gòu)成閉環(huán)[7],為此加入比例環(huán)節(jié)、微分和積分環(huán)節(jié)。則
(7)
式中:KP為比例常數(shù);KD為微分常數(shù);KI為積分常數(shù)。
后續(xù)推導(dǎo)僅考慮比例環(huán)節(jié)[7],線性化軸承動力學(xué)方程,得到
Fx=-KdX=KxX+KcIc,
(8)

結(jié)合(7)~(8)式可以進(jìn)一步得到PID控制比例常數(shù)與偏置電流和電磁軸承綜合剛度之間的關(guān)系為
(9)
將轉(zhuǎn)子偏離平衡位置的位移定義為A,結(jié)合實(shí)際調(diào)試經(jīng)驗(yàn),因?yàn)橛斜Wo(hù)軸承的作用,A最大為0.5(轉(zhuǎn)子接觸保護(hù)軸承),而正常懸浮時(shí)A在0.2以內(nèi)。
線圈電流I1,I2介于0~1之間,本著低偏置電流的思想,在此將偏置電流設(shè)置成不大于線圈最大允許電流的一半,同時(shí)要滿足Ib≥Ic,由此可以得到Ib取值范圍為
KPA≤Ib≤0.5,
(10)
結(jié)合(9)式,利用Kd代替KP,則(10)式可以表示為
(11)
進(jìn)一步推導(dǎo)功耗與偏置電流關(guān)系,將轉(zhuǎn)子在[T1,T2]時(shí)間段的平均功耗作為功耗大小衡量標(biāo)準(zhǔn)[4],
(12)
結(jié)合(3),(7)和(12)式,將P利用Ib表示可以進(jìn)一步得到
(13)
由(13)式可以得到功耗P和Ib關(guān)系如圖2所示。
(14)
而采用固定偏置電流方案的功耗為
(15)


(16)


圖3 Pr和A的關(guān)系圖
由圖3可以看到,隨著A的增大,Pr逐漸減小。通常狀態(tài)下A小于0.2,以Kd=0.3為例,當(dāng)A=0.05時(shí)降低功耗為87.38%;A=0.1時(shí)降低功耗為73.37%。該方案能夠有效地降低軸承的功耗,尤其是在轉(zhuǎn)子振動較小時(shí)。
3 試驗(yàn)驗(yàn)證
3.1 試驗(yàn)方案
試驗(yàn)采用4 kW高速磁懸浮電動機(jī)試驗(yàn)平臺。具體試驗(yàn)方案如圖4所示。

圖4 試驗(yàn)采用的控制方案
轉(zhuǎn)子偏離中心位移A由電渦流位移傳感器進(jìn)行檢測,軸承綜合剛度Kd通過對比給定。由以上兩個(gè)量可以得到偏置電流ib和PID控制比例常數(shù)KP,進(jìn)一步得到控制電流ic。偏置電流和控制電流加在軸承線圈上使得轉(zhuǎn)子恢復(fù)到中心位置。
磁軸承-轉(zhuǎn)子系統(tǒng)結(jié)構(gòu)簡圖如圖5所示,磁軸承-轉(zhuǎn)子系統(tǒng)相關(guān)參數(shù)見表1。

圖5 磁軸承-轉(zhuǎn)子系統(tǒng)結(jié)構(gòu)簡圖

表1 高速磁懸浮電動機(jī)純電磁軸承參數(shù)
3.2 靜浮功耗測試
軸向承重時(shí),徑向四通道懸浮結(jié)果如圖6所示。圖中縱坐標(biāo)為轉(zhuǎn)子偏離平衡位置位移經(jīng)過調(diào)理之后對應(yīng)電壓值U。


圖6 兩種控制方式下轉(zhuǎn)子懸浮狀態(tài)
圖7和圖8波形中尖峰表示轉(zhuǎn)子受沖擊時(shí)線圈的電流變化,兩者均能較快響應(yīng)。由P=i2R知,圖7中線圈平均電流約為0.93 A,此時(shí)徑向軸承(2套)功耗為16.606 W;圖8線圈平均電流為0.42 A,此時(shí)徑向軸承(2套)功耗為3.387 W,后者相對前者功耗降低79.60%。

圖7 固定偏置電流控制
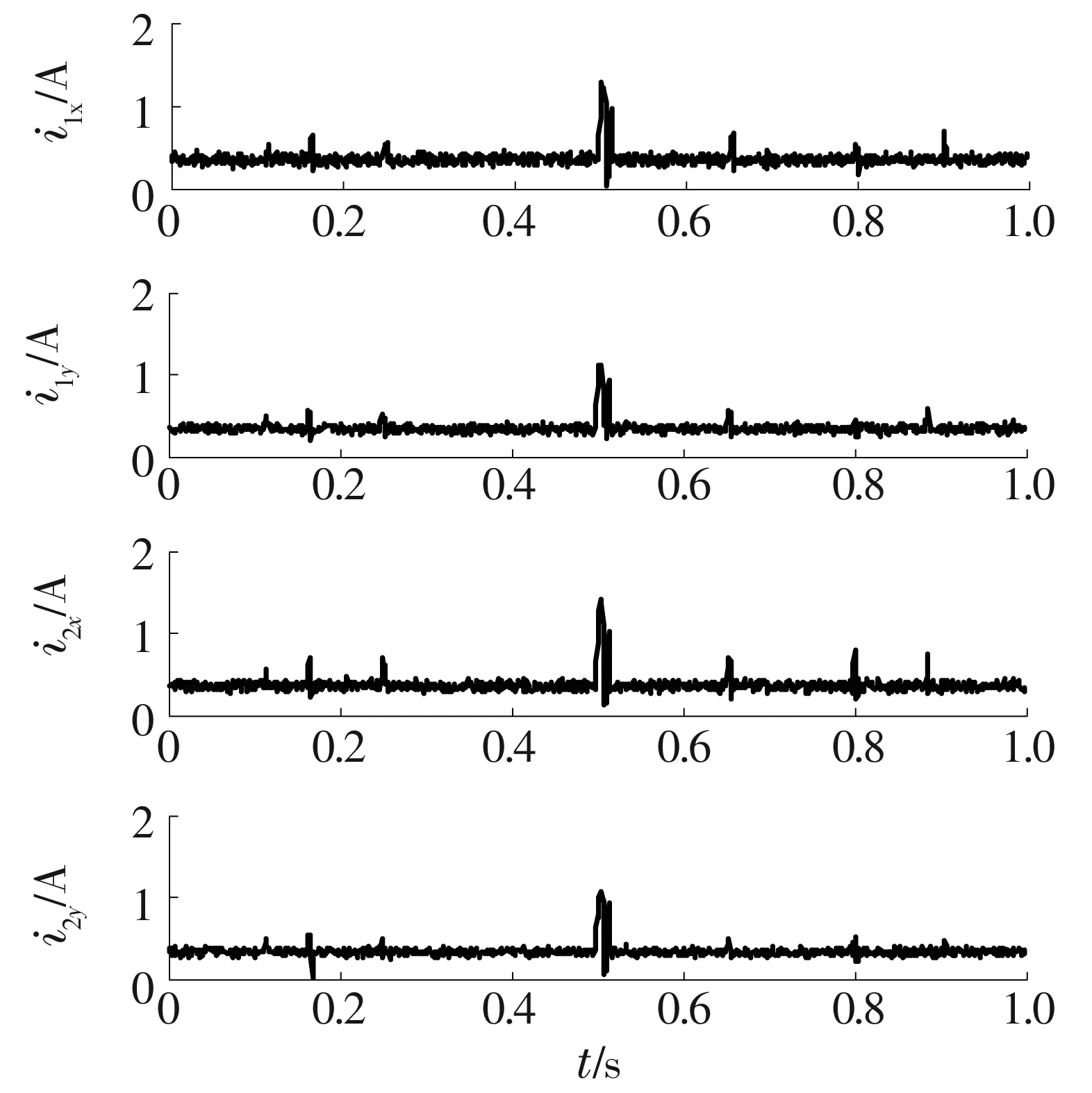
圖8 自適應(yīng)變偏置電流控制
3.3 升速功耗測試
轉(zhuǎn)子彎曲模態(tài)設(shè)計(jì)在800 Hz以上,為了使轉(zhuǎn)子工作在剛性范圍內(nèi),測試電動機(jī)升速到700 Hz過程中線圈電流的變化如圖9所示(每10 Hz記錄一次徑向四通道電流變化)。

圖9 升速狀態(tài)線圈電流
4 結(jié)束語
為了降低磁懸浮軸承的功耗,文中采用自適應(yīng)變偏置電流的控制策略,通過理論分析和試驗(yàn)驗(yàn)證均表明:自適應(yīng)變偏置電流的控制策略可以將轉(zhuǎn)子穩(wěn)定懸浮;相對于經(jīng)典的固定偏置電流控制,其在靜態(tài)懸浮和升速過程中具有很大的功耗優(yōu)勢,靜浮功耗可以降低約79.60%;升速功耗可以降低約76.55%。