基于CAN總線通信組網的四余度發電機組控制系統
2012-07-20 04:00:04楊靜偉李聲晉周奇勛張玉峰
微特電機 2012年1期
楊靜偉,盧 剛,李聲晉,周 勇,周奇勛,張玉峰
(西北工業大學,陜西西安710072)
0 引 言
現代醫療和工業生產領域對于電力供應的可靠性要求越來越高,而傳統的單一發電機發電功能過于簡單、可靠性相對較低,已很難保證諸如醫療機構手術過程及高成本產品生產等供電系統的可靠性。本文設計的多余度發電機控制系統是在Microchip公司MCU基礎上,運用CAN總線通信技術實現四余度發電機控制。
CAN總線在工業自動化領域的應用越來越廣泛,通常采用對等結構即多主工作模式,CAN總線網絡是由許多節點形成,這些節點隨時可以向網絡中的其他節點進行通信,四余度發電機組控制器則是根據CAN總線的這一特點完成多余度實時控制。其特點總結如下:
(1)CAN短幀結構的運用使得傳輸時用時較短,不容易受到外界干擾,為了降低其出錯率,CAN總線采取了CRC校驗等校驗措施;
(2)在CAN總線通信中,主機可以從原來繁重的底層設備監控任務中解放出來進行更高層次的控制和管理功能;
(3)CAN總線的通信介質一般為電纜、雙絞線,也有的CAN總線采用光纖,因此其選擇具有很強的靈活性;
(4)CAN總線協議是唯一有國際標準的現場總線,使系統通用性較好;
(5)CAN總線的數據幀類型包括標準數據幀、擴展數據幀、遠程幀、錯誤幀、過載幀等。
1 系統總體方案設計
四余度發電機組控制系統是由上位機、1個中心控制器、4個分控制器、控制油門用電動機、4臺柴油發電機組成的。四余度發電機組采用LabWindows/CVI作為上位機,通過中心控制器對各個節點發送的數據進行處理和分析,并對系統的工作狀況進行實時顯示和控制;中心控制器則作為上位機與CAN總線之間的橋梁;每個分控制器對應一個步進電動機,對其進行直接控制。系統結構框圖如圖1所示。
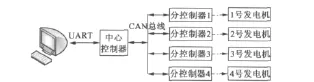
圖1 系統總體控制框圖
2 控制系統硬件設計
2.1 以中心控制器為基礎建立的通信網絡
中心控制器作為控制器的信息傳輸紐帶,一方面與分控制器進行通信,接收反饋數據并將接收到的上位機的指令發送給從控制器;另一方面與上位機進行通信;在四余度發電機控制系統中,中心控制器的中央控制器(MCU)選擇 Mirochip公司的dsPIC30F4011。
在與分控制器建立的CAN總線網絡基礎上,中心控制器最終是通過串口通信與上位機進行數據傳輸,其串口通信采用串口隔離轉換器。
2.2 分控制器硬件結構
四余度發電機組控制系統的四個分控制器的MCU均選擇Mirochip公司的dsPIC30F4012,其功能特點與dsPIC30F4011較為相似,在電機控制PWM模塊特性上,dsPIC30F4012具有6路PWM輸出通道、3個占空比發生器、PWM專用時基和用于互補模式的死區控制并且含有用于A/D轉換的觸發器。本系統PWM控制采用互補模式,并設定死區時間為 2 μs。
本系統設計的伺服分控制器原理圖如圖2所示。系統采用7.5 MHz晶振提供系統時鐘信號;電源模塊采用78L15和78L05為MCU和驅動芯片提供穩定電源;dsPIC30F4012內部A/D模塊為10位,即其接收到的模擬反饋信號轉換為數字反饋信號的精度較高,A/D轉換器最多可以有16個模擬輸入引腳,指定為AN0~AN15。通過位置傳感器的反饋量構成位置閉環,即dsPIC30F4012的給定值與位置反饋信號比較,再通過反饋控制系統的調節作用,使得系統的輸出量跟蹤系統的給定量。

圖2 某分控制器硬件結構框圖
2.3 CAN通信模塊電路設計
四余度發電機組控制系統的CAN通信模塊的每一節點基本上都是由MCU(dsPIC30F4011或dsPIC30F4012)和CAN收發器PCA82C250兩部分構成。圖3是一種CAN模塊接口電路原理圖。在電路的硬件設計中,CAN收發器PCA82C250的原邊與MCU的CAN模塊接口相連,副邊連接到總線電纜中。考慮到增強連接總線電纜的數字信號的抗干擾性能,對收發器CANH1和CANL1管腳進行RC濾波,如圖3R50、R51和C25構成濾波電路。RXD管腳串聯一個1 kΩ的電阻,起到限流保護作用。RS管腳用于選擇工作模式(高速模式、斜率模式、準備模式),考慮到電磁兼容問題,在本系統中電阻R52選用20 kΩ,則收發器處于斜率控制模式。

圖3 CAN模塊接口電路原理圖
3 控制系統軟件程序設計
四余度發電機組控制系統的軟件設計由中心控制器軟件設計和分控制器軟件設計組成,其中每一部分軟件又是由主程序和中斷程序組成。
中心控制器在整個系統中作為一個橋梁,一方面要與上位機進行串行通信,另一方面要完成對四個分控制器的CAN通信,其軟件流程圖如圖4所示。
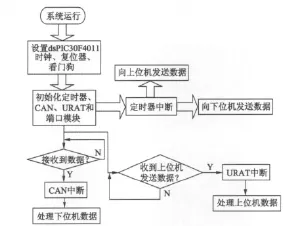
圖4 中心控制器軟件流程圖
圖4中將各部分程序進行模塊化,主程序主要完成系統初始化,其中包括端口方向初始化、定時器初始化、串口通信(UART)初始化、CAN模塊初始化,同時對系統時鐘、看門狗等進行配置。系統配置完成后,需要在程序中斷中進行設置,從而調用相關的數據傳輸函數,從而實現控制策略。其中定時器中斷是每隔1 ms進行一次,在定時器中斷中將完成向四個分控制器下傳數據包和向上位機上傳數據包的功能。
中央控制器的接收數據(包括上位機下傳的數據和分控制器上傳的數據)是被動的,即當UART模塊和CAN模塊檢測到有數據向中央控制器發送時,則觸發中央控制器的UART接收中斷和CAN接收中斷,在相應中斷程序中,根據其數據通信協議對接收到的數據進行相關處理。這樣中央控制器才能順利完成其樞紐的任務。
分控制器的通信部分主要由CAN發送和CAN接收兩部分組成。在CAN接收中斷中將收到的數據指令進行處理,并根據相應的通信協議作用PWM模塊,從而控制發給步進電動機的脈沖數,實現相應的油門位置控制,最終控制柴油發電機組的轉速。其軟件流程圖如圖5所示。
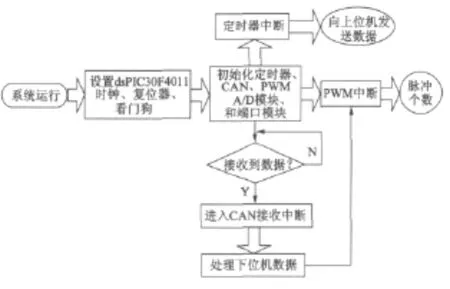
圖5 某分控制器軟件流程圖
4 實 驗
實驗過程中控制部分實際由五個控制器組成,實驗實物圖如圖6所示。
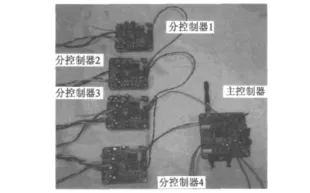
圖6 控制器實驗連接圖
對單臺發電機空載實驗時上位機波形如圖7所示。
圖7 單臺發電機空載時上位機波形
系統經實驗使用,完全滿足設計的需要,在突加、卸載實驗中,圖8為突然加載(10.627 s)和突然卸載(13.124 s)上位機得到的波形,分析結果如表1所示。

圖8 突加卸載時上位機波形圖
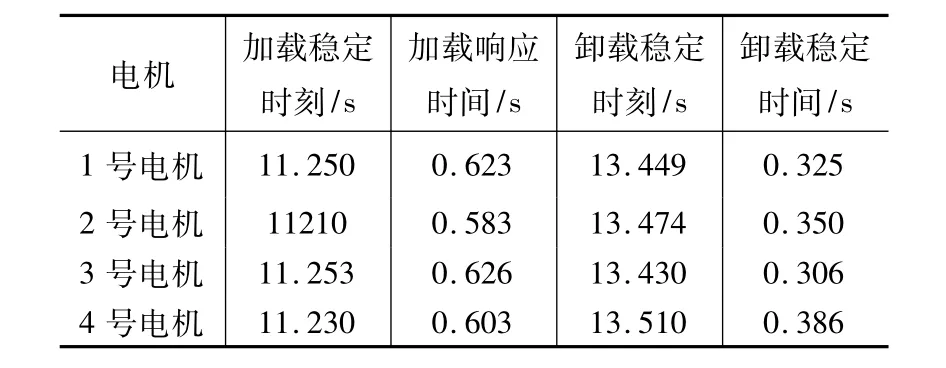
表1 加卸負載時實驗數據
由實驗數據和實驗波形可見,系統加、卸載工作正常,有良好的穩態和動態特性。在突加、卸載時,輸出電壓經過短暫的跳變后迅速達到穩定。四余度發電機組并聯供電具有較好的故障容錯能力,能達到不中斷供電的效果,提高了系統的可靠性。
5 結 語
本文通過CAN通信網絡對柴油發電機組的伺服油門進行控制,相較于一般余度控制技術,本文提出的控制方法具有方便可靠、實時性高、擴展性強等優點,可有效提高傳統柴油發電機的可靠性以及通信的效率。通過對四余度發電機系統相關實驗,證明了本文設計的四余度發電機組控制系統伺服性能比較好,一定程度上發揮了多余度技術的高可靠性。
[1] 饒運濤,鄒繼軍,鄭勇蕓.現場總線CAN原理與應用技術[M].北京:航空航天大學出版社,2002.
[2] 鄰寬明.CAN總線原理和應用系統設計[M].北京:北京航空航天大學出版社,1996.
[3] 滿慶豐.CAN總線的應用與發展[J].電子技術應用,1994(12):1-4.
[4] 忻龍彪.基于CAN總線的電力抄表系統設計[J].儀表技術與傳感器,2005(10):59-60.
[5] 孟凡軍,李聲晉,盧剛.基于CAN總線的輪腿式機器人的分布式控制系統設計[D].西安:西北工業大學,2011.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55