基于RBF控制的開(kāi)關(guān)磁阻電動(dòng)機(jī)直接轉(zhuǎn)矩控制
2012-07-20 04:00:02劉春元王勉華王宗剛
微特電機(jī) 2012年1期
劉春元,王勉華,王宗剛
(1.河西學(xué)院,甘肅張掖734000;2.西安科技大學(xué),陜西西安710054)
0 引 言
開(kāi)關(guān)磁阻電動(dòng)機(jī)(以下簡(jiǎn)稱(chēng)SRM)是繼異步電動(dòng)機(jī)之后的又一種新型電機(jī),具有結(jié)構(gòu)簡(jiǎn)單、起動(dòng)轉(zhuǎn)矩大、控制參數(shù)靈活、調(diào)速性能優(yōu)越等優(yōu)點(diǎn);但是SRM是雙凸極結(jié)構(gòu),通常工作在磁飽和狀態(tài),導(dǎo)致了SRM的電磁特性呈高度非線性,難以用一個(gè)精確的數(shù)學(xué)表達(dá)式來(lái)描述SRM的電磁關(guān)系[1-2]。目前,對(duì)SRM主要的研究方向集中為兩點(diǎn),即電機(jī)本體的設(shè)計(jì)以及控制方法的研究。本文主要從控制方面展開(kāi)論述。
常規(guī)PID控制器由于結(jié)構(gòu)簡(jiǎn)單、實(shí)現(xiàn)容易、控制方便等優(yōu)點(diǎn),仍處于主導(dǎo)地位,得到了廣泛應(yīng)用,其核心就是參數(shù)的整定。但隨著控制對(duì)象系統(tǒng)的越來(lái)越復(fù)雜,常規(guī)PID控制器的參數(shù)是固定不變的,在非線性系統(tǒng)中很難達(dá)到良好的控制效果。由于SRM的電磁關(guān)系呈現(xiàn)為嚴(yán)重的非線性,所以常規(guī)的控制方法很難達(dá)到控制的預(yù)期效果。近年來(lái),隨著人工神經(jīng)網(wǎng)絡(luò)和控制理論(特別是智能控制理論)的逐漸發(fā)展,由人工神經(jīng)網(wǎng)絡(luò)構(gòu)成的自適應(yīng)控制器逐漸在非線性系統(tǒng)中得到了廣泛的應(yīng)用,解決了非線性和不確定系統(tǒng)的控制方面難題。國(guó)內(nèi)外專(zhuān)家學(xué)者將神經(jīng)網(wǎng)絡(luò)控制器應(yīng)用于開(kāi)關(guān)磁阻電動(dòng)機(jī)調(diào)速系統(tǒng)(以下簡(jiǎn)稱(chēng)SRD)中,取得了很好效果。文獻(xiàn)[3]提出了單神經(jīng)元PID控制器;文獻(xiàn)[4]是以BP神經(jīng)網(wǎng)絡(luò)整定的PID控制器;文獻(xiàn)[5]提出了模糊PID控制器等智能控制器,以實(shí)現(xiàn)對(duì)復(fù)雜系統(tǒng)的控制。基于此,本文提出了一種基于RBF神經(jīng)網(wǎng)絡(luò)自整定的PID控制器,利用直接轉(zhuǎn)矩控制的思想,針對(duì)SRM嚴(yán)重的非線性,利用神經(jīng)網(wǎng)絡(luò)構(gòu)成SRM的控制器。為了進(jìn)行對(duì)比,本文同時(shí)也研究了常規(guī)PI的控制方法,結(jié)果表明,本文的方法與單一常規(guī)PI控制器相比,具有控制精度高、響應(yīng)時(shí)間短、超調(diào)較小的優(yōu)點(diǎn),并且當(dāng)系統(tǒng)中存在干擾時(shí),具有很好的自適應(yīng)性能力以及很好的魯棒性。
1 SRM數(shù)學(xué)模型
(1)電壓方程
根據(jù)電磁感應(yīng)定理和能量損耗定理,施加在定子各相繞組兩端的電壓,等于定子因磁鏈變化而產(chǎn)生的感應(yīng)電勢(shì)和電阻壓降之和,即:

式中:U、R、i依次是電機(jī)定子相電壓、相電阻和相電流;θ為電機(jī)轉(zhuǎn)子與定子的相對(duì)位置角;ψ(i,θ)為電機(jī)定子的相繞組磁鏈。
(2)磁鏈方程
對(duì)于SRM,兩相之間的自感相對(duì)互感要大得多,通常可以將互感忽略不計(jì)。這樣一來(lái)就可以用下式來(lái)描述SRM每相繞組磁鏈ψ(i,θ):

式中,相電感的值是由相電流i和轉(zhuǎn)子位置角θ確定,且它們之間為非線性函數(shù),故很難用解析的方法就得式(1)的解析值,目前主要的方法是通過(guò)有限元、神經(jīng)網(wǎng)絡(luò)擬合等方法進(jìn)行計(jì)算。
(3)轉(zhuǎn)矩方程
在一個(gè)控制周期中,電機(jī)的電流基本上不發(fā)生變化。由SRM的瞬時(shí)轉(zhuǎn)矩理論可知,轉(zhuǎn)矩可以用機(jī)械能跟轉(zhuǎn)子位置角的導(dǎo)數(shù)求取,即可以用下式表達(dá):
式中:Wm為機(jī)械能;We為磁共能;Wf為磁場(chǎng)儲(chǔ)能。


(4)運(yùn)動(dòng)方程
按照力學(xué)定律可列出SRM的轉(zhuǎn)子機(jī)械運(yùn)動(dòng)方程:
2 開(kāi)關(guān)磁阻電動(dòng)機(jī)調(diào)速系統(tǒng)(SRD)
SRD由控制器、功率變換器、位置檢測(cè)、電流檢測(cè)和SRM電機(jī)本體構(gòu)成[6],其結(jié)構(gòu)圖如圖1所示。
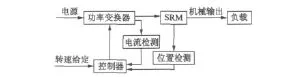
圖1 SRD結(jié)構(gòu)框圖
在本文中,利用直接轉(zhuǎn)矩控制構(gòu)成SRD系統(tǒng),其結(jié)構(gòu)圖如圖2所示。內(nèi)環(huán)包括磁鏈估算和轉(zhuǎn)矩估算。磁鏈估算通過(guò)式(1)的變形即 φ=∫(U-iRs)dt得到,然后跟給定磁鏈比較,得到磁鏈差;轉(zhuǎn)矩估算由SRM的輸出模塊給定;外環(huán)由具有自適應(yīng)功能的RBF神經(jīng)網(wǎng)絡(luò)控制器,輸入為給定速度與實(shí)際速度輸出之差,經(jīng)過(guò)RBF神經(jīng)網(wǎng)絡(luò)控制器,得到輸出轉(zhuǎn)矩T*,其值跟SRM模塊的輸出轉(zhuǎn)矩T比較,得到轉(zhuǎn)矩差值ΔT。送入開(kāi)關(guān)表的信號(hào)為轉(zhuǎn)矩差ΔT、磁鏈差Δψ以及區(qū)間判斷信號(hào)Zone,利用直接轉(zhuǎn)矩控制原理,控制功率變換器中的開(kāi)關(guān)信號(hào),以達(dá)到對(duì)磁鏈的控制,進(jìn)而實(shí)現(xiàn)對(duì)轉(zhuǎn)矩的精確控制。本文中,功率變換器選用不對(duì)稱(chēng)半橋型結(jié)構(gòu)形式。

圖2 SRM直接轉(zhuǎn)矩控制結(jié)構(gòu)圖
3 RBF神經(jīng)網(wǎng)絡(luò)
近年來(lái),RBF神經(jīng)網(wǎng)絡(luò)在非線性系統(tǒng)的建模、預(yù)測(cè)、分析等方面得到了廣泛的研究和應(yīng)用[7]。它是一種典型的由輸入層、隱含層、輸出層組成的三層前饋式神經(jīng)網(wǎng)絡(luò),結(jié)構(gòu)圖如圖3所示。
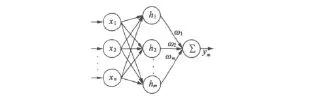
圖3 RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖
輸入層為 X=[x1,x2,…,xn],本文中,輸入為轉(zhuǎn)矩以及給定轉(zhuǎn)速與實(shí)際轉(zhuǎn)速的差值,隱含層為H=[h1,h2,…,hj,…,hm]T,節(jié)點(diǎn)選取為高斯函數(shù),由線性神經(jīng)元組成。輸出為所有隱含層節(jié)點(diǎn)的輸出之和。
對(duì)于單個(gè)網(wǎng)絡(luò)輸出的RBF網(wǎng)絡(luò),第k個(gè)隱含層單元的輸出:

式中:‖ ‖表示歐式范數(shù);Xi為第i個(gè)輸入向量;cj為第j個(gè)隱含層節(jié)點(diǎn)的中心;bj為第j個(gè)隱含層節(jié)點(diǎn)的寬度。
整個(gè)網(wǎng)絡(luò)的輸出方程:

式中:ωj為第j個(gè)隱含層節(jié)點(diǎn)與輸出層節(jié)點(diǎn)的連接權(quán)值;H為總的隱含層節(jié)點(diǎn)數(shù)。
定義辨識(shí)網(wǎng)絡(luò)的性能指標(biāo)Jm:

式中:f(k+1)為系統(tǒng)的實(shí)際輸出;y(k+1)為系統(tǒng)的期望輸出。本文中,cj、bj、ωj參數(shù)的確定,按照梯度下降法進(jìn)行計(jì)算,即有下式確定:

式中:α為動(dòng)量因子;η為學(xué)習(xí)速率。
4 RBF速度調(diào)節(jié)器設(shè)計(jì)
針對(duì)SRM電磁嚴(yán)重的非線性,采用結(jié)構(gòu)簡(jiǎn)單的常規(guī)PID調(diào)節(jié)器很難實(shí)現(xiàn)對(duì)其的精確控制。利用具有自適應(yīng)的神經(jīng)網(wǎng)絡(luò)控制器,可以根據(jù)參數(shù)的變化,調(diào)節(jié)器發(fā)生相應(yīng)的變化,根據(jù)神經(jīng)網(wǎng)絡(luò)能任意逼近任何非線性函數(shù)的特點(diǎn),本文提出了基于RBF神經(jīng)網(wǎng)絡(luò)整定的PID控制。仿真實(shí)現(xiàn)圖如圖4所示。其中輸入為給定速度n*與輸出轉(zhuǎn)速n之差Δn以及輸出轉(zhuǎn)矩Te,輸出為參考轉(zhuǎn)矩T*和PID參數(shù)。T*通過(guò)與Te比較,輸入滯環(huán)調(diào)節(jié)器對(duì)轉(zhuǎn)矩進(jìn)行調(diào)節(jié)。

圖4 RBF控制器的仿真實(shí)現(xiàn)
nnrbf_pid由S-function實(shí)現(xiàn),主要功能是通過(guò)梯度下降法對(duì) cj、bj、ωj參數(shù)的調(diào)整,完成基于 RBF網(wǎng)的PID調(diào)節(jié)器。為了使控制器更接近實(shí)用,在輸出環(huán)節(jié)之后增加一個(gè)限幅環(huán)節(jié)。
5 仿真結(jié)果及分析
本文在MATLAB中建立了SRM的直接轉(zhuǎn)矩控制,控制器采用上述的RBF自適應(yīng)控制。調(diào)速系統(tǒng)的仿真模型,如圖5所示。

圖5 整體仿真圖
本文中,以60 kW、四相8/6結(jié)構(gòu)的SRM為研究對(duì)象,給定轉(zhuǎn)速n=1 000 r/min。開(kāi)始時(shí),系統(tǒng)運(yùn)行在空載狀態(tài),即TL=0,同時(shí)為了驗(yàn)證該系統(tǒng)的抗干擾能力,當(dāng)系統(tǒng)運(yùn)行0.4 s后,使系統(tǒng)由空載轉(zhuǎn)換為帶TL=12 N·m的負(fù)載,于0.75 s時(shí)再變?yōu)榭蛰d,在此過(guò)程中,要求電機(jī)的速度n要穩(wěn)定在給定轉(zhuǎn)速1 000 r/min。為了與PI控制器進(jìn)行比較,仿真時(shí)控制器分別采用了PI控制與RBF兩種控制方法,局部速度響應(yīng)曲線如圖6所示。

圖6 局部速度響應(yīng)曲線
從圖6中可以看出,僅僅利用PI控制器,系統(tǒng)的超調(diào)比較大,約為4%,且上升時(shí)間比較長(zhǎng);當(dāng)系統(tǒng)中存在干擾時(shí),到達(dá)到所要求的速度,調(diào)節(jié)時(shí)間比較長(zhǎng);而用RBF神經(jīng)網(wǎng)絡(luò)控制器,系統(tǒng)的超調(diào)明顯減小,當(dāng)存在干擾時(shí),系統(tǒng)的自適應(yīng)能力比較強(qiáng),速度能一直維持在給定速度,抗干擾能力好。控制效果明顯優(yōu)于單一的PI控制器。
圖7給出了系統(tǒng)的輸出轉(zhuǎn)矩曲線。可以看出,系統(tǒng)的起動(dòng)轉(zhuǎn)矩比較大,在限定值附近。系統(tǒng)穩(wěn)定運(yùn)行時(shí),轉(zhuǎn)矩脈動(dòng)僅為±1 N·m,當(dāng)加入干擾時(shí),轉(zhuǎn)矩能夠很快地穩(wěn)定在給定的值附近,充分證明了利用此種方法能有效地減少系統(tǒng)的轉(zhuǎn)矩脈動(dòng)。
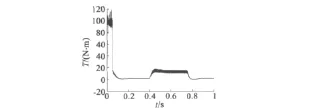
圖7 轉(zhuǎn)矩曲線
為了驗(yàn)證本文所闡述的直接轉(zhuǎn)矩控制對(duì)SRM的控制效果,圖8同時(shí)給出了直接轉(zhuǎn)矩控制與電流斬波控制的磁鏈軌跡圖。從圖中可以看出,前者幅值被限定在滯環(huán)寬度內(nèi),磁鏈軌跡是一個(gè)圓形,磁鏈幅值基本恒定,達(dá)到了直接轉(zhuǎn)矩控制的目的;后者磁鏈軌跡接近四邊形,達(dá)不到磁鏈幅值恒定的原則。從而證明了此種方法的控制效果要遠(yuǎn)遠(yuǎn)好于電流斬波控制的方法。
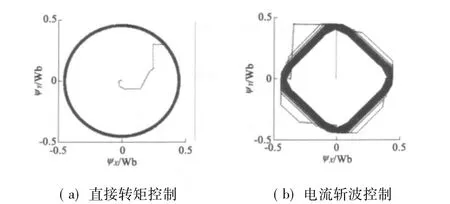
圖8 磁鏈軌跡
6 結(jié) 語(yǔ)
本文充分利用RBF神經(jīng)網(wǎng)絡(luò)泛化能力強(qiáng)和計(jì)算速度快的優(yōu)點(diǎn),將直接控制控制技術(shù)與智能控制很好的結(jié)合起來(lái),構(gòu)成SRD控制器。仿真結(jié)果表明,該種控制方法具有較好的穩(wěn)定性和動(dòng)態(tài)響應(yīng)能力;具有響應(yīng)時(shí)間短、超調(diào)小的優(yōu)點(diǎn);系統(tǒng)動(dòng)、靜態(tài)性能良好,并且保證了系統(tǒng)的抗干擾能力,對(duì)系統(tǒng)具有較高的控制精度,對(duì)具體的工程實(shí)踐有很好的指導(dǎo)意義。
[1] 王宏華.開(kāi)關(guān)磁阻電動(dòng)機(jī)調(diào)速控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,1995.
[2] 吳建華.開(kāi)關(guān)磁阻電機(jī)設(shè)計(jì)與應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2000.
[3] 于力,歐陽(yáng)紅林.一種基于單神經(jīng)元PID控制的多相永磁同步電動(dòng)機(jī)矢量控制系統(tǒng)[J].微電機(jī),2007,40(8):89 -92.
[4] 廖芳芳,肖建.基于BP神經(jīng)網(wǎng)絡(luò)PID參數(shù)自整定的研究[J].系統(tǒng)仿真學(xué)報(bào),2005,17(7):1711 -1713.
[5] 李麗娜,柳洪義.模糊PID復(fù)合控制算法改進(jìn)及應(yīng)用[J].東北大學(xué)學(xué)報(bào)(自然科學(xué)版),2009,30(2):274 -278.
[6] 王勉華,梁媛媛.開(kāi)關(guān)磁阻電機(jī)直接轉(zhuǎn)矩模糊PI控制器的設(shè)計(jì)[J].電氣傳動(dòng),2010,40(1):51 ~54.
[7] 黃友銳,曲立國(guó).PID控制器參數(shù)整定與實(shí)現(xiàn)[M].北京:科學(xué)出版社,2010.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12