面向工程應用的導航算法性能測試系統研究①
2012-07-18 03:50:08丁繼成張軍嶺李英飛
全球定位系統 2012年1期
關鍵詞:系統
丁繼成,張軍嶺,趙 琳,李英飛
(哈爾濱工程大學自動化學院,黑龍江 哈爾濱150001)
0 引 言
衛星導航、慣性導航及其組合系統是目前絕大多數應用領域首選的導航定位方式,國內外學者提出了大量的實現方案和優秀算法,目前,已有一些設備能夠輔助完成這些算法方案的實際工程測試與驗證,如小體積GPS集成模塊、可重配置的GPS軟件接收機、各種高精度GPS差分定位儀、可用于半實物仿真的各類衛星導航信號模擬器、慣性導航儀器/設備、基于微機電系統(MEMS)技術的陀螺儀和加速度計器件、用于導航數據處理的嵌入式微計算機平臺等[1-4]。然而,由于構建驗證系統的復雜性以及諸如信號模擬器、高精度導航定位儀等一些設備的高成本性,使得大多數算法方案仍停留在理論仿真階段,特別是GNSS/SINS組合算法的深入研究,缺乏接近實際工程應用的測試。設計并實現了一種基于高性能現場可編程門陣列(FPGA)和數字信號處理(DSP)器件、面向工程應用的多功能導航算法性能測試系統方案,可對衛星導航和慣性導航優秀算法進行實時、實地性能測試,更為GNSS/SINS實用組合算法的前沿性探索研究提供了面向工程應用的軟硬件平臺支撐,固化相應算法程序后也可用于GNSS單頻、多頻接收機或者SINS導航計算機、組合導航系統等。
1 系統硬件平臺設計
導航算法性能測試主要完成導航原始數據獲取和算法運算,要求系統具有完善的硬件平臺支撐,支持多種導航信號的接收,具有高效的運算性能。因此,系統硬件平臺采用開放的分布式結構設計思想,多處設計保證其多功能性和高靈活性,可完全作為滿足不同測試需求的硬件平臺支撐。
1.1 總體設計
系統總體結構如圖1所示,FPGA和DSP為系統數據處理的核心。FPGA適合數據量大,運算速度要求高,算法結構相對簡單的情況,進行硬件編程實現,能夠實現底層信號快速處理;針對高層處理算法數據量低但結構復雜的特點,采用運算速度快、尋址靈活、通信機制強大的DSP芯片實現。因此,利用FPGA完成底層簡單運算、數據接收發送及一些控制工作,使DSP專注于復雜算法的實現,二者可通過外存儲器(EMIF)接口進行快速通信,或通過串行外設接口(SPI)進行串行通信。
作為整個系統的控制中心和數據交換橋梁,FPGA完成GNSS和慣導原始測量信息的接收與預處理,再送入DSP進行導航解算,運算結果傳回FPGA,由LCD液晶屏進行顯示。在此過程中,FPGA可控制輸出數據處理任意階段的數據信息,并通過USB或串口輸入至上位機,同時,上位機可通過FPGA對系統下達各種工作模式指令。為實現數據流無縫緩沖和處理,FPGA擴展兩片SRAM以完成乒乓操作。
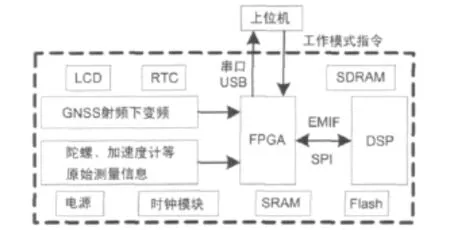
圖1 系統總體結構圖
1.2 靈活性設計
通過對整個算法測試系統平臺功能需求分析,硬件平臺靈活性設計主要體現在用戶可任意配置時鐘支持、靈活的射頻(RF)前端支持、MEMS器件及其它多導航傳感器支持三個關鍵部分。
1)時鐘頻率可任意配置性
用戶可配置時鐘方案不僅從硬件層面滿足系統對任意頻率時鐘的需求,還可避免不同芯片采用不同時鐘所帶來的系統運算誤差,提高系統整體性能。如圖2所示,時鐘源采用精度為1PPM的10 MHz溫補晶振,鑒于其輸出幅值低和驅動能力弱,由AD8012進行整形放大,再由時鐘芯片ICS525進行變換輸出用戶可任意配置的時鐘信號。

圖2 用戶可配置時鐘方案
2)多GNSS信號接收支持
GNSS軟件接收機RF前端芯片采用MAX2769,適 用 于 GPS/GLONASS/GALILEO接收機,滿足GNSS信號采集多樣性需求,不僅可實現單頻衛星導航接收機方案,也可實現多體制衛星導航系統的組合。該器件內部集成了包括雙輸入低噪聲放大器、混頻器、鏡像抑制濾波器、可編程增益放大器、壓控振蕩器、N分頻頻率合成器、晶體振蕩器以及多位ADC完整的接收機鏈路,總噪聲系數低達1.4dB.片內∑-ΔN分頻合成器可實現±40Hz精度的中頻編程,從而與主機系統所提供的任意基準或晶體頻率配合工作。集成的ADC輸出可以同時為I路和Q路通道輸出一個或兩個量化位或者為I通道輸出三個量化位,支持CMOS和有限差分邏輯電平兩種數據輸出格式。
3)多導航傳感器支持
為滿足對慣性元件原始測量數據的需求,選用6自由度、數字輸出慣性傳感器ADIS16365,通過SPI端口獲取X、Y、Z軸角速率和線性加速度,及內部溫度等原始測量信息。其SPI通信符合3.3 V電平標準,減小了系統硬件復雜度。同時,硬件平臺設計時,為其他導航傳感器的數據輸入留有充足的可擴展接口,例如,磁強計 HRM3000的RS232輸入接口等。
2 系統軟件模塊設計實現
由于新算法的測試驗證不可避免地需要與其相關的基礎平臺算法的支持,因此,構建圖3所示的基于本平臺的低成本、參數可重置、完全開放的GPS軟件接收機和捷聯慣導系統軟件模塊。當需要驗證某一部分新算法時,可避免從底層基礎算法開始搭建。
如圖3所示,GPS高頻信號經RF前端下變頻后,傳輸給FPGA和DSP進行分布式處理,慣性傳感器作為從設備通過SPI突發讀(Burst Read)方式向FPGA快速傳輸陀螺儀、加速度計等原始測量信息,經存儲和預處理后,供給DSP進行解算,圖中虛線表示該基礎算法平臺可為GNSS和SINS不同組合方案提供支持。因此,系統軟件主要包括衛星導航信號處理模塊和慣性導航數據處理模塊。
2.1 衛星導航信號處理模塊
如圖3所示,衛星偽距噪聲碼(PRN)編號分配器在自動搜星開始后為12個通道分配不同衛星號,防止多個通道同時搜索同一顆星。載波和C/A碼生成器產生本地中頻載波數據和當前搜索衛星的C/A碼序列。相關累加器實現載波剝離和C/A碼剝離,進行積分運算,產生超前、當前和滯后積分值,提供給鑒相器使用。鑒相器與濾波器通過計算積分值實現鑒頻、鑒相和鑒別碼相位功能,經過濾波處理后產生載波環和延遲鎖定環所需要的調整量。捕獲跟蹤控制器是整個通道的控制中心,通過鑒別相關峰值控制整個通道的狀態,并產生其他模塊所需的控制量,包括請求新的PRN編號、提供下次搜索頻率的偏移值、提供碼相位移動信號、分配環路穩定所需的控制量等。數據解調與觀測量提取器為定位解算提供導航電文和相關觀測量信息。在DSP中,采用通用的LS(最小二乘方法)依次對偽距和多普勒方程組進行求解的[2],得到用戶位置和速度信息。
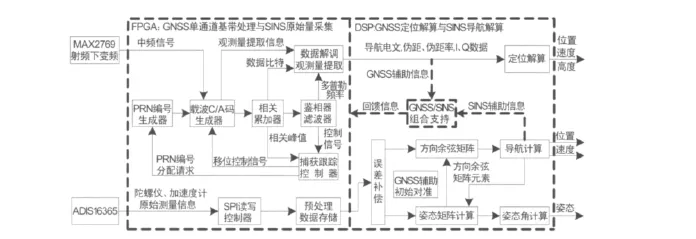
圖3 基于硬件平臺的系統軟件設計
2.2 慣性導航數據處理模塊
依據GNSS輔助信息進行初始對準是慣導系統啟動時的首要工作,如圖3所示,以便為積分運算提供系統的初始速度和位置信息。FPGA獲取慣導原始測量信息后,先進行預處理和存儲管理,便于DSP的讀取并作誤差補償計算。陀螺儀、加速度計原始測量信息只是相對于載體坐標系的量,必須通過姿態矩陣轉換至導航坐標系下,采用經典的四元素法進行姿態矩陣的更新運算。獲取姿態矩陣后,將加速度計測量的比例值通過姿態矩陣變換后和其它相關量一起代入速度方程,求出速度分量,而用戶的位置信息基于此做積分運算即可獲得。
3 系統對GNSS/SINS組合系統的支持
GNSS與SINS的組合應用與研究已經成為一種趨勢,組合的重點在于數據融合算法的設計與實現[7],而融合數據獲取和融合前數據同步是進行數據融合的先決條件。
3.1 各組合模式數據融合需求分析
衛星導航與慣性導航的組合按組合深度可分為松組合、緊組合和超緊組合,圖4顯示了不同組合模式所需關鍵信息。隨著組合深度的增加,所需信息從位置、速度,到偽距、偽距率,再到GNSS相關運算的I、Q數據,獲取難度不斷加大,對分系統的開放性要求越來越高。同時,較深的組合勢必增加算法復雜度,對處理器性能提出了更高的要求。

圖4 GNSS/SINS各組合結構圖
本測試系統在FPGA中實現GNSS軟件接收機基帶處理,整個過程完全開放,可方便獲取偽距、偽距率和I、Q數據等信息,高性能浮點DSP更保證了各種改進的卡爾曼濾波算法高速、高精度運行[5-7]。同時,采用 TI公司專為C6000系列 DSP設計的基本輸入輸出系統(BIOS)實時多線程開發環境,確保系統能夠進行多線程實時運算。
3.2 數據同步問題
組合導航系統在進行數據融合前,必須保證用于融合的數據在融合時間點上嚴格一致,解決GNSS和SINS兩個子系統數據同步問題的難點在于兩者更新率差別較大。以GPS/SINS組合為例,一般情況下,GPS的數據更新率典型值為1Hz,SINS的數據更新率則高達100Hz以上,本系統采用的MEMS器件ADIS16365在BurstRead模式下可達到5kHz.并且各子系統運行時存在不同的通信延遲等原因,也給數據同步造成一定困難。
本測試系統基于FPGA的開放性結構,與DSP靈活的通信方式,方便GPS/SINS在數據同步上的軟硬件實現[10]。要獲取同一時刻的數據信息,關鍵是求出同步時間差t1和t2,如圖5所示,利用GPS的1PPS脈沖作為同步標準時刻,FPGA接收到GPS中頻數據時,產生一個中斷,通知DSP進行計數,直到此后第一個SINS數據到來,得到t1,而t2=T-t1,得到t1和t2,可以用卡爾曼濾波器作最優估計,利用與GPS數據相鄰的兩個SINS數據來推算出GPS時刻的SINS數據,保證了兩種數據在時間上的嚴格一致性。
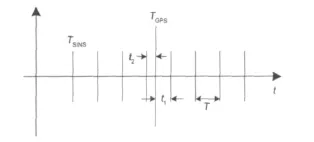
圖5 GPS與SINS數據同步
4 測試結果與分析
硬件平臺實物如圖6所示,尺寸為17.24cm×12.66cm,方便攜帶。5V供電,整機功耗<2.5 W.平臺各部分電路調試工作正常,電源模塊轉換輸出的3.3V和1.2V電壓具有噪聲低、穩定性強等特點。對平臺時鐘部分的可任意配置性作重點驗證,按時鐘理論需求值39MHz對時鐘芯片ICS525配置后,實際輸出如圖7所示,驅動能力、時鐘頻率均符合要求。
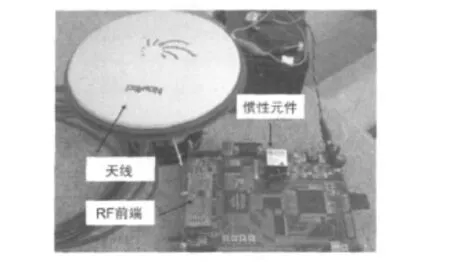
圖6 系統硬件平臺實物圖
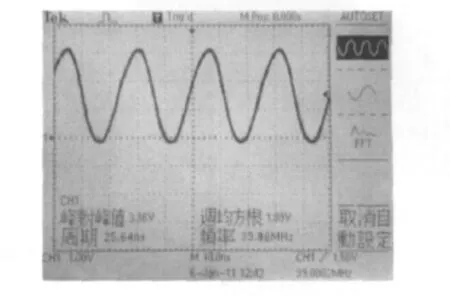
圖7 示波器測量的時鐘波形
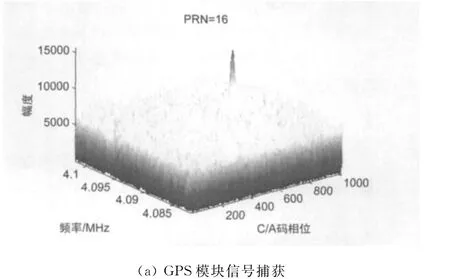
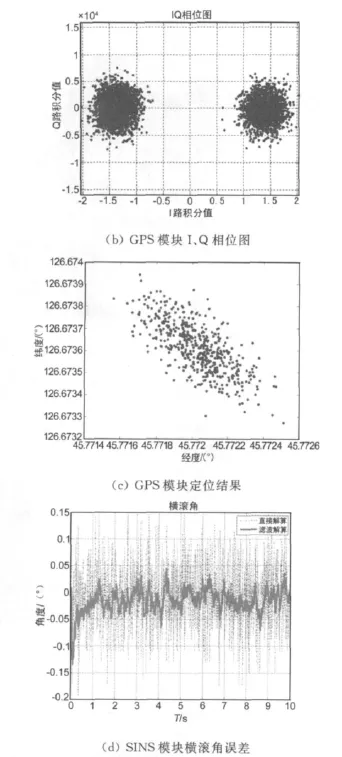
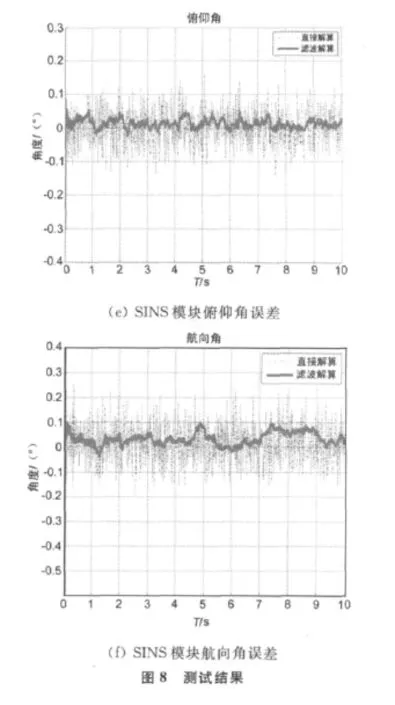
GPS軟件模塊實時靜態定位測試實驗采用NovAtel公司高性能天線GPS-701-GG,軟件程序固化在硬件平臺非易失存儲器上,定位基準由No vAtel公司兩套Propak-V3型GPS接收機組成的差分定位系統測得。實際測試過程中,中頻信號頻率4.092MHz,采樣頻率16.368MHz,搜索步長500Hz,復制的載波頻率精度0.019Hz,C/A碼相位精度在1/2個碼片之內,中頻信號量化為2bit,載波(NCO)輸出的正余弦量化為4bit,捕獲門限設為3 500.圖8(a)中明顯的相關峰值顯示對16號星捕獲成功,圖8(b)表明相位跟蹤成功,有穩定的數據比特輸出,圖8(c)為500次單點靜態定位Matlab 統 計 圖,與 基 準 位 置(45.772 1°,126.673 6°)相比,定位精度優于10m(CEP95)。慣性導航軟件模塊測試實驗的原始測量數據由上文所述的MEMS器件ADIS16365提供,數據更新率5kHz,分辨率14bit,三軸陀螺儀具有±75°/s、±150°/s、±300°/s三種數字量程刻度的可設置性,平方根(RMS)噪聲密度為0.044°/sec/三軸加速度計測量范圍為17g,RMS噪聲密度為靜止情況下做姿態跟蹤試驗,結果如圖8(d)、(e)、(f)所示,分別為橫滾角、俯仰角和航向角的靜態跟蹤誤差,虛線為直接解算結果,誤差較大,達到0.2°,實線為加入卡爾曼濾波后的解算結果,跟蹤精度<0.05°.軟件模塊測試結果表明:衛星導航和慣性導航基礎算法具備基本定位功能且有一定的精度,為本測試系統提供了軟件層面的有力支撐。
4 結 論
研究并設計了一套面向工程應用的多功能導航算法性能測試系統方案,用戶可配置時鐘模塊、RF前端模塊、多導航傳感器支持以及軟件模塊的構建使系統對導航算法性能測試具有完善靈活的軟硬件支撐功能,測試與分析表明:本系統完全可以以較低的成本使優秀導航算法的研究由計算機仿真轉向實時系統測試,具有重要的實際工程應用價值。鑒于目前本課題只是初步完成了GPS軟件接收機和捷聯慣導系統的靜態測試實驗,下一步工作目標將進一步完善系統基礎算法平臺,在復雜環境下對導航算法性能展開測試。
[1]BERNSTEIN J.An overview of MEMS inertial sensing technology[J].Sensors,2003,4(2):11-13.
[2]PETER R.Design of a single frequency GPS software receiver[D].Aalborg:Aalborg University,2004.
[3]GUENTER W H,THEOMAS P.Platforms for a future GNSS receiver a discussion of ASIC,FPGA,and DSP technologies[J].Inside GNSS,2006(4):56-62.
[4]胡 銳,薛曉中,孫瑞勝,等.基于FPGA+DSP的嵌入式GPS數字接收機系統設計[J].中國慣性技術學報,2009,17(2):187-190.
[5]JAN W,Trommer G F.Tightly coupled GPS/INS integration for missile applictions[J].Aerospace Science and Technology,2004,8(7):627-634.
[6]CASPER E S.INS and GPS integration[D].Lyngby,Denmark:Technical University of Denmark,2006:60-72.
[7]JOVANCEIVIC A,BROWN A,GANGULY S,et al.Ultra tight coupling implementation using real time software receiver[C]//Proceeding of ION GNSS 2004,Institute of Navigation,2004:1575-1586.
[8]陳 帥,管雪元,薛曉中,等.彈載GPS/SINS組合導航信息同步與融合技術[J].火力與指揮控制,2009,34(10):69-72.
[9]DA R.Investigation of a low-cost and high-accuracy GPS/IMU system [C]//ION National Technical Meeting.Santa Monica,California,14-16January,1997:955-963.
[10]游文虎,姜復興.INS/GPS組合導航系統的數據同步技術研究[J].中國慣性技術學報,2003,11(4):20-35.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
