車載GNSS接收機多徑抑制技術①
2012-07-18 03:50:08王振嶺
全球定位系統 2012年1期
王振嶺
(1.中國電子科技集團公司第54研究所,河北 石家莊050081;2.河北省衛星導航技術與裝備工程技術研究中心,河北 石家莊050081)
0 引 言
車載GNSS接收機的偽距測量會受到很多誤差因素的影響,其中,由多徑影響所帶來的誤差幅度較大,在車載接收機使用環境下,多徑會受到周邊工作環境的影響而使其具有特殊性和時變性,也因此更加難以預測。盡管擴頻技術自身對信號延遲較大的多徑信號具有很好的抑制作用,而當多徑延遲較小(典型值小于1chip)時,仍然會對偽距觀測量產生很大影響。傳統的通信系統對多徑的考慮僅限于信號幅度的影響,而衛星導航系統則對信號延遲帶來的影響更為關注。因此,面向車載GNSS接收機極其廣泛的應用,其產品研制需要對多徑抑制的實現予以重點考慮。
緊密結合車載GNSS接收機的應用特點,對多種多徑抑制方法進行了介紹和分析比較,并給出結論。
1 車載GNSS接收機多徑影響及特點
1.1 多徑
多徑描述的是一個衛星信號通過多個路徑到

式中:s(t)為傳輸的信號;a0為直達信號的幅度;τ0是直達信號的時間延遲;n(t)為高斯白噪聲;M是多徑信號的個數;ai、τi分別為第i個多徑分量的幅度和延遲。
圖1給出了GNSS衛星到接收機的直達信號和非直達信號的傳輸原理示意圖。可以看出,幾何學環境是產生多徑的主要因素,信號被周圍建筑物、物體等的反射是產生多徑的主要原因。
實際上,信號的反射還可以劃分為散射和平面反射兩類。散射是一種較大區域內分散的反射,其結果波形可使用多個不同幅度和相位的反射波之和進行描述。散射引起的多徑效果符合Rayleigh分布[1],但通常很難建模,在實際處理中一般按噪聲處理。平面反射通常來自于天線附近的物體,該達接收機產生的影響。多徑可以認為是系統的內部干擾,它包括來自天線的一條直達信號(直線)和多條間接信號(非直線信號)的疊加。假設天線接收到若干不同時刻和功率的傳輸復制信號,則可定義受到多徑影響的衛星的接收信號為條件下的合成波形幾乎沒有相位和幅度的起伏,因而更具有確定性。

圖1 多徑原理圖
1.2 多徑對信號接收處理的影響
接收機在多徑環境下的接收信號實際上是直達信號和多徑信號的疊加。由于多徑信號與直達信號具有相同的信號結構,加之在RF前端存在相同的多普勒偏移,因此,RF前端無法區分直達信號和多徑信號,更無法消除多徑。所以,多徑的抑制一般只能通過天線和信號處理來實現,并且信號處理環節更為重要。
從處理本質上講,多徑主要影響接收機數字處理器中的相關峰計算。多徑信號和直達信號具有結構相同但時間不同的偽碼,本地信號和多徑信號的相關峰不能消除因非正交關系引入的相關邊峰,因此,相關函數和鑒別器函數均會受到多徑信號的影響,從而進一步影響跟蹤精度,引入測距誤差。
鑒別器函數的零交叉值表征了用來解算位置的偽距值,任何多徑信號都會改變鑒別器函數而使得零交叉值偏移,該偏移量與距離誤差相對應。鑒別器函數的一次方程就是早相關峰值減去遲相關峰值,并利用即時相關峰值R(τ)加權。

多徑效應可以簡單地表示為在上述基礎上附加第二、第三甚至更多個低幅度的相關峰值。因此,加上或減去多徑是可以進行區別的。考慮多徑來源和接收機的信號路徑,多徑誤差是以下參數的函數[2]。
信號類型(BPSK,BOC,等等);信號帶寬;碼速率;功率電平;由反射引起的信號衰減;多徑信號數目;相關間隔及鑒別器類型;載波頻率(載波多徑);幾何位置;環境參數。
從根本上講,相關峰越窄受多徑影響的概率也就越低。圖2示出了多種調制體制的GNSS信號多徑誤差包絡,可以看出多徑誤差包絡是依賴多徑延遲的距離誤差。與GPS相比,Galileo新信號所具有的窄相關峰能夠有效減小多徑效應。
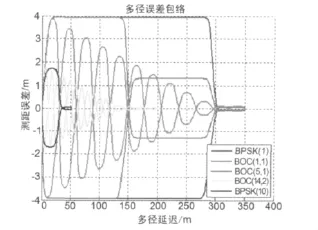
圖2 多徑誤差包絡窄相關間隔d=0.05
由于多徑信號傳輸路徑較長,多徑信號之間具有相位偏移(在碼和載波上有偏移),相位偏移量是幾何條件和時間的函數。多徑可以同時影響碼測量和相位測量,但碼片寬度相對較長,碼測量的多徑誤差在數值上比較高。以GPS L1C/A碼信號為例,表1給出了碼和相位測量的多徑誤差比較[1]。
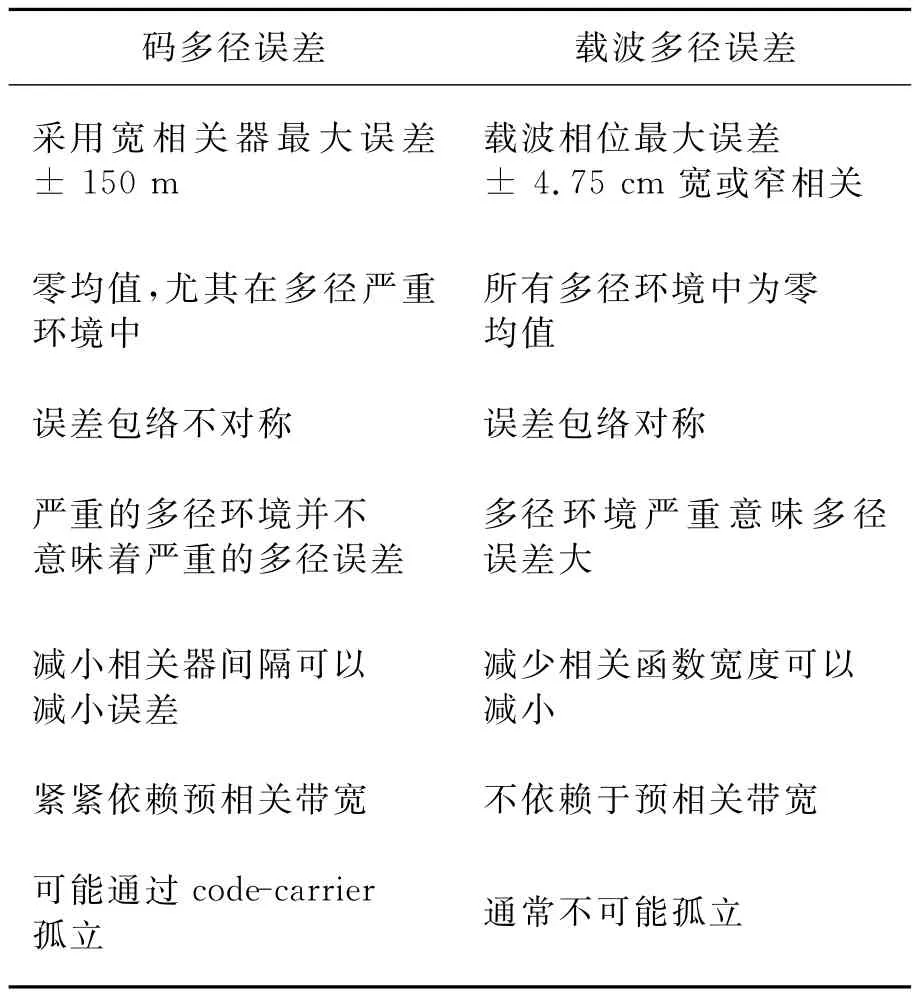
表1 GPS L1C/A的碼及載波多徑比較[1]
多徑信號和直達信號根據相位的偏移量可分為建設性(加)疊加和毀壞性(減)疊加,其功率會隨時間而變化,進而可以推導得知信噪比會隨多徑信號數及其相對相位偏移而變化。
此外,只要信號被反射,就可能改變信號的極化方式[3]。依據Brewster角,信號從右旋極化到左旋極化改變,或圍繞偶數個反射信號的其他方式改變。GNSS信號是右旋極化信號,因而使用只對右旋極化信號敏感而忽略左旋極化信號的天線可以消除大量反射信號。
1.3 車載GNSS接收機多徑的特點
不受多徑誤差影響的接收機通常只有在廣闊的鄉間區域才可能實現,自然建筑、山脈、丘陵、溪谷、城市、峽谷,甚至樹木和石頭都可能導致多徑。對于車載應用而言,GNSS接收機的多徑條件會不斷連續變化而變得更加復雜,多徑問題也因此成為市區環境下導航系統最令人煩憂的問題。作為極端多徑干擾的例子,必須提到市區場景,在這種場景下,除了自然物體導致的多徑外,人造物體也會導致多徑,像橋梁、隧道、房屋、交通標志、立交橋和燈柱,甚至也會受到周圍車輛以及車輛本身結構的影響。
此外,空間的GNSS衛星會連續不斷地改變位置,車載接收機的位置也經常改變,所以多徑同時是時間和位置的函數。在靜態環境應用中,通過重現衛星星座能夠確定多徑,但是在動態環境下是不可能的。周邊環境的精確模型在原理上可以幫助估計多徑環境或建立多徑環境模型,而這些模型對于車載應用而言是不可用的,對于具有低處理功率要求的GNSS接收機,所需要處理的數據量太大。
總之,車載GNSS接收機的多徑具有復雜、多變的特點,很難進行常規估計。此外,車載應用中不僅需要考慮一個信號的影響,還需要考慮來自所有衛星所有信號的多徑影響,并且所有信號的多徑干擾程度也是不同的。
2 可用多徑抑制方法及分析比較
多徑抑制方法可分為天線技術、信號處理和導航解算三類,也有人將基于信號處理和導航解算的多徑抑制方法進一步分為直接緩解技術和估計技術兩類。
2.1 基于天線的多徑抑制方法
天線是導航信號接收處理的最前端,直達信號通過天線進入GNSS接收機的同時,多徑和干擾信號也同樣進入接收機。為了正確地接收直達信號,盡可能早地去除干擾至關重要,可以根據直達信號的波形特征針對性設計適合接收該類信號的天線。
1)改進的單體天線
GNSS信號是右旋圓極化信號,在鏡面反射情況下,極化方式從右旋圓極化變化成左旋圓極化,接收機天線很容易削弱或忽略所有的左旋圓極化信號,但左旋圓極化信號再次反射就成為右旋圓極化信號,可被天線無削減地接收。由建筑、山體和其他環境物體產生的多徑信號通常會使低仰角衛星信號降級,對天線采取技術手段使之忽略所有的低仰角衛星信號。一種可行的方法是使用專門的可吸收水平投影的阻塞環天線。阻塞環天線包括很多圍繞中心天線的傳導同心圓筒,因其結構精密,通常會在外部使用用于保護的蓋子。而天線成本、重量和高度是限制天線批量生產的重要因素,應當予以考慮。
2)自適應天線陣列
使用陣列天線是另一個基于天線抗多徑的更好方法。陣列天線在任何可能方向形成天線增益波束,這在動態環境中尤為重要。
靜態陣列天線包括一組天線陣元和延遲單元,其中延遲單元使每個天線信號的相位產生偏移,所有具有相位偏移的天線信號重疊形成天線波束。自適應陣列天線(也成為相控陣)用于引導增益波束指向明確的衛星,比靜態陣列天線更容易使可能的干擾和多徑源產生零陷。而車載應用中多徑環境連續改變,所以,波束增益也需要相應地快速調整。因為,只有波束方向上的信號能夠很好地接收,對于衛星跟蹤來說,窄波束最好。但必須提到的是,有必要考慮每個接收信道的自適應信號處理和期望衛星的位置來控制波束。然而,出于大小、重量、能量消耗和成本的原因,自適應天線陣列并不適合車載應用。
2.2 基于信號處理的多徑抑制方法
基于信號處理的多徑抑制方法是目前研究最為深入和有效的方法。原則上存在兩種不同的減弱多徑的信號處理方法,第一種是使用單獨的相關器技術,通過某種方式分析相關結果去除多徑影響,實際的多徑信道并不重要,只是用來假定所利用的多徑參數,如延遲和衰減。第二種方法是估計多徑信道傳輸函數,通過試圖估計多徑影響程度,消除多徑和干擾對直達信號的影響。此外,近年來還出現了用于多徑抑制的頻域技術和Ray Tracing技術。
1)相關器技術
信號處理中超過1chip延遲的相關峰可以被忽略,因此,需要判斷不同的相關能量,以避免將干擾信號相關峰作為直達信號相關峰。抗多徑技術的實現需要充分結合信號/接收機進行調整和優化,不同技術的應用需要綜合考慮。例如Galileo系統對BOC調制方式的應用使信號體制自身的多徑抑制能力得到了增強。
應用于快速動態變化車載環境的多徑抑制相關器技術有多種,如窄相關、雙Δ相關器、Earlylate斜率(ELS)技術、Early1-early2跟蹤器等。仿真表明:在BPSK和BOC調制信號的處理中,這些相關器技術的性能都比相關器間隔d=1chip的標準超前減滯后鑒別器優越。圖3和圖4示出了針對這兩種調制信號不同相關器的仿真結果。
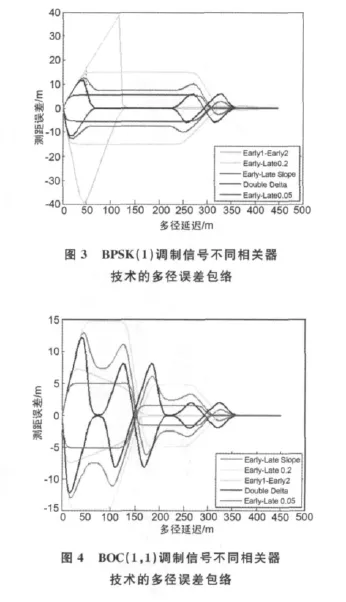
根據仿真結果可知,對于BPSK(1)調制信號,Early1-Early2鑒別器對于減小短延時多徑是性能最差,但對于較大多徑具有抑制作用。Early-Late斜率技術和窄超前減滯后鑒別器相似,雙Δ鑒別器技術性能最好,對于短延時和長延時多徑存在距離誤差,而對于其他區域偽距誤差為0.間距d=0.2的超前減滯后鑒別器對BOC(1,1)調制信號的多徑消除效果最差。Early-Late Slope技術具有相似的偽距誤差性能,窄超前減滯后鑒別器技術具有很好的性能。超前減滯后鑒別器在減小相關器間隔時表現出較小的距離誤差,但無限小間隔不可能實現。雙Δ鑒別器技術對BPSK(1)信號具有很好的效果,但對BOC(1,1)信號消除多徑的性能較差,其偽距誤差振蕩幅度高于間隔為d=0.1窄超前減滯后鑒別器技術。Early1-Early2鑒別器技術對于減少BOC(1,1)信號多徑影響是最好的方法。
對兩種不同類型的信號,一種信號相關器技術最好,而另外一種卻是最差的。因此,處理兩種類型信號的鑒別器最好使用窄超前減滯后鑒別器技術,該方法對兩種信號均不是最好也不是最壞。
2)估計技術
估計技術可以用來修正多徑誤差。多徑誤差的估計是一個典型的非線性任務,其參數是多維的。車載應用中的多徑估計限制因素均是多徑的動態變化,在多徑信道變化之前必須足夠快地計算出估計值。另一個限制因素是用于估計的相關器的個數,每增加一個相關器就消耗一定的芯片資源,并因此增加成本。
最大似然(ML)方法于1995年首次被提出用于多徑抑制[4],該方法考慮了多個影響相關函數的多徑信號,并估計其參數。Lentmaier M提出了一種減小復雜度的方法[5],該方法將問題分解為一維任務和近似迭代最大似然方法,多徑估計DLL(MEDLL)、SAGE算法或vision相關器就是該算法的例子。基于ML的各種其他方法可在其他多個文獻中看到,有些方法根據應用要求滿足理論的Cramer Rao限。但ML具有復雜度和精度有限的缺點,并且沒有考慮所有的反射信號,因此,只限于靜態測量或測量時間上靜止的天線。
表2將可用的估計技術分為靜態和動態兩類,這些估計技術都可用來估計動態信道或靜態多徑效應。
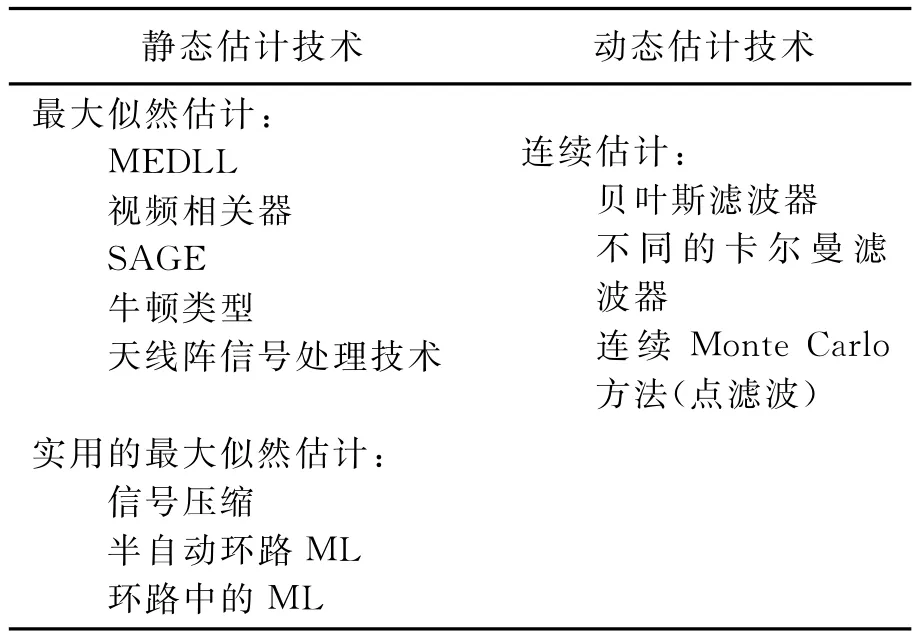
表2 多徑估計技術及分類
值得一提的估計技術還有自適應多徑抑制濾波器和粒子濾波器方法。自適應多徑消除濾波是一種類似于MEDLL的方法,自適應濾波器可以估計多徑延遲,用接收信號的相關函數減去多徑信號的相關函數,修正的結果反饋到載波和相位鑒別器用于產生載波和偽碼。連續蒙特卡洛(SMC)方法是眾所周知的粒子濾波器,由于多徑傳播不是線性過程,所以,卡爾曼濾波不是最佳的多徑估計方法,而SMC方法不限于線性模型。
3)頻域技術及Ray Tracing技術
頻域消除多徑的方法類似于時域,即搜索丟失(LOS)信號,在頻域意味著查找其頻域p0(ω).除了相位不同于多徑信號的反射時間延遲,多徑的頻域信號非常類似于LOS信號。時域和頻域的二值性允許兩者之間的互相轉換,兩個時域信號的卷積與互功率譜的逆傅里葉變換是相同的,互功率譜是相應的兩個頻域信號乘積,其中一個作為共軛復數。
Ray Tracing技術是一種測定從發射機到接收機的傳輸路線的算法。該方法基于幾何光學,并考慮了反射和折射。為了得到正確的多徑估計,需要準確地知道本地環境和目標。車載環境中的Ray Tracing技術需要知道精確定義的環境三維模型。3D城市模型用來提高性能和有效性,但當以50km/h的速度開車穿過城市時,計算量十分龐大。然而,該技術將是一個在未來可用的技術,那時3D模型變得更加成熟,并且芯片的處理性能提高,在加權初始化例程情況下,Ray Tracing可以和碼偽距平滑處理相結合。
2.3 基于導航解算的多徑抑制方法
基于導航解算的方法用于在觀測量的后端處理消除多徑影響,并利用受到多徑影響的偽距和相位測量值來進行位置求解。基于導航解算的方法包括加權、碼偽距平滑、多頻率測量、多徑衰落信道模型、傳感器融合處理等。
1)加權
加權處理即依賴于偽距加權的方法,偽距的處理利用權值矩陣來表示在確定參數時每個觀測量的重要程度。可將觀測方程表示如下

其中:I為觀測值;A為設計(幾何)矩陣;X包含未知的參數(至少包括位置和鐘差)。參數矩陣可以用以下方式估計

其中,W表示權矩陣,它在確定參數時每個觀測量的重要程度,應是選擇適當的權值。權值可以由測量的不確定性、衛星的高度、信噪比或者其他的方法確定。受多徑影響的信號具有不同的噪聲功率,對這些觀測量進行權值分離得到更好的位置解。當然,低仰角的衛星信號會顯著地受到多徑影響,并反映在這些信號的權值分量中。通過調整觀測量的冗余度可以更進一步地確定受多徑影響比較大的觀測量,如RAIM算法,這些觀測量被排除在位置求解之外而降低多徑影響。
2)碼偽距平滑
載波相位測量與偽距測量所受到的影響不同,通過用偽距和相位測量來進行碼偽距平滑可以最小化多徑的影響。只要沒有循環滑動,這個方法具有良好的效果,但循環滑動卻是城市環境中汽車應用不可避免的一個問題。利用兩個時間點的連續相位測量值,比較它們的多普勒頻移與時間間隔的乘積,可以檢測到循環滑動。由于觀測量權的時間獨立性,算法需要幾個時間點來得到最好的結果。在循環滑動的情況下,算法會失效,需要用相位測量值來檢測是否有循環滑動(用連續時間點的測量和多普勒頻移)。出現循環滑動時,權被重置為1,這樣會消除循環滑動的影響,以適合車載應用。此外,在測量冗余度高的時候還可以修正循環滑動。
3)多頻率測量
多頻率測量方法使用信號的聯合來估計消除多徑信號對一個衛星不同頻率不同信號的影響。如果不考慮多徑的聯合,將會很大程度上涉及到不考慮電離層的聯合。GPS將來會提供幾個更多的民用信號,像伽利略一樣。這些多頻信號的發射可以有效地消除多徑。
Hill Climbing方法是一種典型的使用多重信號的方法,這種算法采用具有5taps長的自適應信道估計濾波器的預估計器和一種連續的算法。選用BPSK(1)和BPSK(10)兩個信號,可以構成典型的GPS系統。在典型的市區環境,這些方法幾乎可以消除多徑。
4)多徑衰落信道模型
衛星信號在傳輸信道中必定通過受到不同影響的條件才能到達接收機的天線,信道對信號的最大影響是信道損失,并且頻率不同、傳播環境不同的損失也不同。除了電離層和對流層影響外,其他的影響還包括遮擋,遮擋影響也有一個經驗的模型,如用來表示信道損失的COST Hata模型或者Okomura模型。多徑和衰落是很小的信道影響。考慮到多徑時,時不變信道變為時變信道。時間離散意味著頻率選擇性,因此,多徑信道有一個頻率選擇衰落效應。頻率選擇衰減(時間離散)和時間選擇衰落(多普勒展寬)可以合并到 WSSUS模型中。也就是說時間變化是廣義不變的,不同時延下的衰減和相位偏移是非相關離散的,進而可以用時變系統函數(也稱Bello函數)描述。
除了這些標準的多徑信道模型,還有其他方法可以表示信道影響的模型。例如室內峽谷中無LOS多徑傳輸模型的射線徑跡方法以及德國航天中心(DLR)建立的陸地移動多徑信道模型(LMMCM)等。
5)傳感器融合處理
傳感器融合方法是依賴于GNSS和其他傳感器測量值的處理方法,目的是最小化所有的影響GNSS觀測值的誤差。盡管應用傳感器信息的方法可以應用于基于天線和信號處理的多徑抑制,目前,傳感器融合策略也開始應用于基于導航解算的消除方法中。傳感器信息可以用于接收機架構的不同層次,并且其信息需要預處理(如校準)和濾波。利用傳感器信息可以簡化波束形成、輔助跟蹤環、與偽距測量值比較、聯合定位濾波器、多源信息融合定位等。
可用于多徑消除的傳感器包括所有的提供導航相關信息或者各種相關信息的傳感器。因此,自動傳感器,像加速器、陀螺儀、磁力計、氣壓計,也包括其 他 的 導 航 系 統,例 如,UWB-positioning,RFID-positioning等。對于汽車應用,可能會有地圖匹配一類的傳感器來輸入到消除多徑效應,這在多車道通行應用中會很重要。
3 車載多徑消除策略綜合考慮
在汽車環境苛刻情況下實現GNSS信號的高效接收是很大的挑戰,一方面車載環境的多徑變得更加復雜和多變,另一方面,車輛環境的接收機需要實現低能耗。這就意味著需要先進的數字信號處理和軟件設計方案,并必須按這個目標設計。所以,計算速度快但價格高的數字信號處理硬件在廣泛應用的車載多徑消除中是不可取的。
多徑信道的變化速度很快,還依賴于衛星的運動,尤其是機動車輛運動引起的環境改變。由于變化速度很快,只有快速實時多徑消除技術可以應用。因此,大多數如Ray Tracing、粒子濾波等多徑估計技術由于其計算復雜而不太適用。而信號處理方法(如移動相關技術)、基于導航解算的方法(例如加權和碼偽距平滑)和傳感器融合方法(例如陀螺儀或加速度傳感器)成為首選方法。
4 結 論
根據上述分析和比較,綜合考慮車載GNSS接收機的特殊應用環境,基于信號處理的方法和導航計算的方法更加適合車載接收機應用。尤其是相關器技術、頻域技術、加權及多頻測量技術等。傳感器融合技術作為車載條件特有的方法也可以充分考慮,并且能夠在服務連續性方面帶來好處。而基于天線的方法只能在成本允許的前提下有選擇的應用。
[1]RAY J R.Mitigation of GPS code and carrier phase multipath effects using a multi-antenna system[D].Department of Geomatics Engineering,University of Calgary,March,2000.
[2]PANY T,IRSIGLER M,EISSFELLER B.Code and carrier phase tracking performance of a future Galileo RTK receiver[C]//ENC-GNSS 2002,USA:Copenhagen,2002:382-387.
[3]IZADPANAH A.Parameterization of GPS L1multipath using a dual polarized RHCP/LHCP antenna[D].Department of Geomatics Engineering,University of Calgary,2009.
[4]VAN NEE D J R,TOWNSEND B R,FENTON P C,et al.The multipath estimating delay lock loop:Approaching theoretical accuracy limits[C]//ION GNSS,USA:Palm Springs,Texas,1995:18-20.
[5]LENTMAIER M,KRACH B,ROBERTSON P,et al.Dynamic multipath estimation by sequential Monte Carlo methods[C]//ION GNSS,USA:Fort Worth Convention Center,Texas,2007:1712-1721.
[6]張孟陽,呂保維,宋文淼.GPS系統中的多徑效應分析[J].電子學報,1998,26(3):10-14.
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
鴨綠江(2021年35期)2021-04-19 12:24:18
當代陜西(2021年2期)2021-03-29 07:41:24
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中國塑料(2016年3期)2016-06-15 20:30:00
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
