CRH3動車虛擬駕駛仿真系統的設計與實現
2012-07-05 07:25:34吳海超張安全
華東交通大學學報 2012年2期
吳海超,張安全
(1.南京鐵道職業技術學院江蘇南京210031;2.鄭州捷安高科股份有限公司河南鄭州450001)
我國高速鐵路的迅速發展,使得動車組司機培訓機制未能及時完善。具有我國自主知識產權的高速鐵路動車組誕生后,司機培養的問題更加突出。目前動車組駕駛面臨的問題是動車司機專業人才緊缺;動車司機培訓難度高、周期長;在培訓過程中,學員的學習效率低。日本、法國、德國等國家的高速鐵路起步較早,發展比較成熟,相應的培訓機制比較健全,培訓設施比較完備。由于鐵路安全生產特色要求,難以在高速鐵路現場進行司機培訓;部分鐵路高職院校雖然也在積極開發培訓資源,但受資金困擾,現有實訓設施的更新升級難以保證。
采用虛擬現實技術,對CRH3動車組駕駛進行全三維虛擬化列車邏輯模型仿真,在仿真系統上對學員進行“真實情景模擬駕駛”培訓,有如下優勢成本低、性價比高電氣設備等系統故障的設置、查找、排除可以反復進行,不會產生設備的磨損,不會造成破壞性后果,故障設置依據參考文獻[1]可以輕松設置現實中不經常遇到而采用實物方式設置又很麻煩的故障[2]充分利用文本、圖形[3]、三維影像、三維動畫和聲音等多媒體表現形式,刺激學員的視覺、聽覺神經,調動學員的學習積極性可以展示不可視、不可摸、不可入列車部位的結構、布局及連接方式符合國家低碳戰略,綠色、環保。
CRH3動車虛擬駕駛仿真系統的設計與實現,能夠在仿真環境下對動車司機進行模擬駕駛、故障處理、非正常行車處理等方面的多媒體教學培訓,有效地提高了培訓質量、降低了培訓成本。
1 虛擬現實技術簡介
虛擬現實(virtual reality,簡稱VR,又譯作靈境、幻真)是近年來出現的高新技術,也稱靈境技術或虛擬仿真。虛擬仿真能讓使用者如同身歷其境一般,已經被世界上一些大型企業廣泛地應用到工業的各個環節。虛擬仿真技術的引入,將使工業設計的手段和思想發生質的飛躍,更加符合社會發展的需要。工業仿真系統不是簡單的場景漫游,而是真正意義上用于指導生產的仿真系統,它結合用戶業務層功能和數據庫數據組建一套完全的仿真系統,可組建B/S、C/S兩種架構的應用,可與企業ERP、MIS系統無縫對接,支持SqlServer、Oracle、MySql等主流數據庫。
應用虛擬仿真技術來解決動車司機培訓的難題,是必要而可行的。
2 CRH3動車虛擬駕駛仿真系統設計
CRH3模擬駕駛仿真系統由CGI線路場景、三維動車組仿真模型及后臺的列車仿真邏輯構成,總體劃分為多媒體教學、模擬駕駛、故障處理、非正常行駛4個模塊,每個模塊都具備教學、演練、考核評價3個主要功能。
系統設計能夠實時準確響應各項操作,能夠正確反應列車固有的控制邏輯關系,所有的操作信息能夠根據實際情況實時更新并輸出相關的仿真計算結果,如列車的所有電氣、電子、機械系統的結構、關聯關系及動作時序均根據實際形式進行一對一的仿真;所有操作、顯示設備、開關、發音、發光、報警系統能夠按實際情況進行控制和響應,所有的顯示系統具有與真實系統相同的界面、菜單結構、按鈕及功能;系統觸發的列車故障現象與真實情況一致。
多媒體教學模塊采用文字、聲音、圖片和圖像等多種信息,將CRH3動車組的使用、應急故障處理、檢修作業等以預先制作的數字動畫的形式進行呈現,并設計簡潔、美觀的交互式人機界面、可以方便的進行播放控制,如快進、快退、暫停、聲音控制等;模擬駕駛模塊采用教師提前設置演練任務的方式,如列車類別、運行區段、列車故障發生位置及類型、臨時限速位置等,使學員熟悉機車、熟悉操作;故障處理模塊培訓學員檢查并排除故障/突發事件的能力;非正常行駛模塊培訓學員在駕駛機車遇到如下雨、下雪等一些突發情況時的處理能力[5]。
通過計算機多媒體授課來實現生動的場景交互式教學功能;以任務形式設置演練內容,使學員在情景化引導欄指導下,逐步排查、直至完成故障處理,達到演練目的;考核評價體系能將學員的每一次訓練都記錄保存在系統數據庫中,包括學員信息和訓練記錄數據,對于有標準操作答案的項目,系統還會自動評判出成績并記錄在數據庫中,教師根據記錄進行進一步的審閱、評判和管理,最后發布成績。
3 CRH3動車虛擬駕駛仿真系統開發
仿真系統的開發包括3D動車模型設計開發、場景建模開發和引擎程序開發。
系統中的模型采用Autodesk公司的3DSMAX作為建模軟件,建模方法主要為Polygon(多邊形)建模。模型構建貼圖及交互控制腳本見參考文獻[6],模型效果如圖1所示。

圖1 模型效果圖Fig.1 Model rendering
場景包括軌道(鐵軌、交叉口、道岔、路基、道床),架空線路(支柱、基礎、墜砣、腕臂、拉桿、絕緣子、定位器、定位桿、支撐桿、接觸網導線、承力索、吊弦),軌旁設備(信號機、應答器、轉轍機、進路顯示、邊界顯示、停車顯示、限速顯示、反方向標識等),站臺(車站及附屬設備、廣告牌、乘客、停車標等),沿線景物(露天風景、橋梁、隧道、立交橋、建筑、行人、車輛等),交會運行的其他CRH3動車組。場景的視景仿真系統采用計算機生成圖像(CGI)的三維場景,CGI線路視景以現場線路數據為基礎,全三維數字化建模,線路縱斷面、曲線半徑等線路參數與真實一致;場景的聲音仿真系統包括列車外部的聲音(列車在線路上運行的聲音、風聲、鳴笛聲、制動摩擦聲、周圍環境聲音、列車報站聲音、碰撞障礙物時的聲音)與列車內部的聲音(司機操作過程中列車產生的各種電器吸合、斷開聲音;司機臺HMI、ATP顯示屏提示聲;列車運行過程中有關設備的電氣、機械噪聲;牽引電動機運轉的聲音;空氣制動系統產生的明顯聲音)。場景建模從視覺、聽覺、速度感、操縱真實感等方面逼真地再現了列車在不同情況下的運行環境。場景建模技術見參考文獻[7],場景組織結構可參考文獻[8]。
系統的三維引擎采用OSG(OpenSceneGraph)技術實現。OSG使用OpenGL技術開發,是一套基于C++平臺的應用程序接口(API)。OpenGL技術為圖形元素(多邊形、線、點……)和狀態(光照、材質、陰影……)的編程提供了標準化的接口。因此,OSG讓程序員能夠更加快速、便捷地創建高性能、跨平臺的交互式圖形程序。系統的界面則采用Qt制作。Qt是諾基亞開發的一個跨平臺的C++圖形用戶界面應用程序框架,它提供給應用程序開發者建立藝術級的圖形用戶界面所需的所用功能。Qt是完全面向對象的,很容易擴展,并且允許真正地組件編程。系統運行的界面如圖2所示。

圖2 系統運行界面示意圖Fig.2 Operation interface diagram of the system
4 列車性能仿真
系統能夠準確真實地仿真CRH3動車組在各種運行環境與運行工況下的運行狀況、操縱特性、牽引/制動特性以及其它特性,包括列車運行仿真、列車動力學仿真、控制特性仿真、控制邏輯仿真、牽引特性仿真、制動特性仿真等幾方面。
4.1 列車運行性能仿真
列車運行性能仿真由CRH3型動車組列車邏輯仿真模型、動力學模型、ATP邏輯仿真模型、故障仿真系統、運行參數數據庫等部分構成。
列車運行仿真可以對坡度長度、坡度大小;曲線長度、半徑及方向;不同路段的運行阻力;CRH3動車組自重和負載情況;牽引電機的特性和狀態;電制動和空氣制動的特性與狀態;輪軌粘著系數;停車制動特性和應用;列車長度;列車編組數量等運行條件進行響應與處理。列車運行仿真可以接收線路數據;列車參數;學員的操作;教員發出的控制;天氣及季節的變化;信號的變化;道岔開通方向的變化;分相區信息;臨時限速等數據和狀態:
運行時,操縱輸入處理模塊通過網絡通訊模塊及操縱臺輸入與輸出接口計算機獲得學員的操縱動作,并改變列車邏輯表中的對應參數;列車邏輯計算及ATP邏輯計算模塊定時進行計算列車邏輯及ATP邏輯的邏輯計算;列車牽引及動力學計算模塊將部分邏輯計算結果作為列車運行計算的依據。一次仿真計算完成后,邏輯計算與運行計算的結果被通過網絡通信模塊送往操縱臺、電器柜進行輸出控制,同時也被送往視景、聲音、運動仿真系統進行相應的控制,并被記錄在運行記錄文件中以備對訓練過程的評價與調用。
在運行過程中,訓練課程中預設的故障會被相應的觸發條件觸發[9],并通過故障處理系統影響當前的列車邏輯表、ATP邏輯表或列車運行參數數據庫中的數據,從而可能導致非正常的邏輯及運行計算結果輸出。故障處理系統的基礎編碼則可參考文獻[10]。教員也可通過教員系統對當前的訓練過程實時設置故障或改變當前的列車運行參數,其結果與訓練課程中預設的、按照觸發條件觸發的結果相同,都可能導致非正常的邏輯及運行計算結果輸出。由于具備完整的邏輯與動力學仿真模型,因此系統會正確地計算出這些非正常現象的輸出結果。這些結果將會在操縱臺上的儀表、指示燈、TMS-MMI、ATP-MMI、視景系統、聲音系統、運動系統得到同步的、協調一致的反映,所反映出的現象將和CRH3動車組在真實環境下的運行一樣。
受訓司機可通過這些現象來判斷故障或采取相應的措施應對突發事件。系統提供硬件實做、軟件模擬并舉的方式供學員進行排除故障的模擬訓練,無論采用哪種方式,正確的故障排除步驟將會影響列車或ATP邏輯表,從而使其恢復到正常狀態。當司機無法完成故障的排除時,可由教員通過教員監控系統來取消或清除故障。
本系統中根據CRH3型動車組列車的實際情況建立與之一致的邏輯仿真模型、ATP仿真模型以及動力學及牽引計算模型[11],且這些模型大多以數據的方式存放在系統數據庫中。因此,系統在不改變源程序的基礎上,通過對應參數或數據的定義即可完成CRH3動車組運行中正常狀態、非正常狀態的仿真。
4.2 列車動力學性能仿真
列車動力學性能的仿真模型能夠達到列車模擬運行、車輛姿態與動態仿真控制的技術要求。列車動力學性能的仿真主要針對列車的縱向、垂向和橫向動力學性能而言,將列車的每節車輛視為一個質點,前后質點之間通過車鉤力建立聯系,全列車構成了一個離散質點系。仿真計算需要確定列車模擬運行過程中任意時刻的線路狀態(坡度、曲線、道岔、軌道譜等)、每節列車、車輛的阻力、制動力、牽引力、位置、速度、加速度、以及它們之間的相互作用力(即車鉤力)。
就列車縱向動力學而言,將列車中的每節車輛都看作一個受外力作用的質點,則每一輛車的運動方程為

式中:Mi為車輛的質量;i為第i節車;Fi為動車牽引力或動力制動力,若是拖車則Fi為零;動力制動時為Fi負值;Xi為車輛在線路上的位移;t為車輛在線路上的運行時間;fi+1為車輛后端車鉤上的力;fi為車輛前端車鉤上的力;Ri為車輛的基本阻力;Bi為車輛的空氣制動力;gi為線路附加阻力(坡道、曲線、隧道等阻力)。
4.3 控制特性仿真
仿真系統能夠實時準確響應司機的各項操作,實時計算每節車輛的相關條件并具有真實性與準確性。仿真模塊能夠正確反應列車固有的控制邏輯關系,所有的操作信息能夠根據實際情況實時更新并輸出相關的仿真計算結果。列車的所有電氣、電子、機械系統的結構、關聯關系及動作時序均根據實際形式進行一對一的仿真。司機操作臺上的所有操作、顯示設備、開關、發音、發光、報警系統能夠按實際情況進行控制和響應,所有的顯示系統具有與真實系統相同的界面、菜單結構、按鈕及功能。列車的牽引、制動系統均按照真實情況產生控制指令和響應。系統觸發的列車故障現象與真實情況一致。
4.4 控制邏輯仿真
司機操縱臺上的開關、按鈕、司機控制器是整個列車控制系統的輸入參數,控制系統中所有電器以及連接它們的導線之間有著密不可分的聯系。列車控制模型是指列車在正常和故障工況條件下,控制系統內部之間的得電、失電關系。控制系統的工作受司機臺開關和控制器的控制輸入,并與控制系統內部各類電器的狀態及它們的連接關系相關。
用這些變量來進行牽引、制動等狀態變化時的聲音、儀表、指示燈的輸出控制。
4.5 牽引特性仿真
列車的牽引力、制動力都按照全列車各車輛的牽引力、制動力的總和進行計算。計算的具體方法遵守《列車牽引計算規程》的要求。為了使列車牽引計算獲得的運行速度曲線具有連續性,將列車的計算模型簡化為:以車輛中心為車輛質點,且質點間無相對運動的質點系。從而考慮了列車長度對線路附加阻力計算的影響,使計算結果更加接近于實際情況。
列車牽引計算主要用于針對給定訓練課程與運行條件下CRH3動車組標準操縱曲線的自動生成,以便將模擬操縱曲線與標準操縱曲線進行比較,評判受訓司機的操縱水平。模擬操縱曲線圖如圖3所示。
4.6 制動特性仿真
制動特性符合CRH3動車組手動制動方式及由ATP控制的自動制動方式并用的特性,動作方式符合電氣再生制動方式與電氣指令式空氣制動方式并用的特性。制動力-速度模擬曲線圖如圖4所示,制動距離模擬曲線圖如圖5所示。
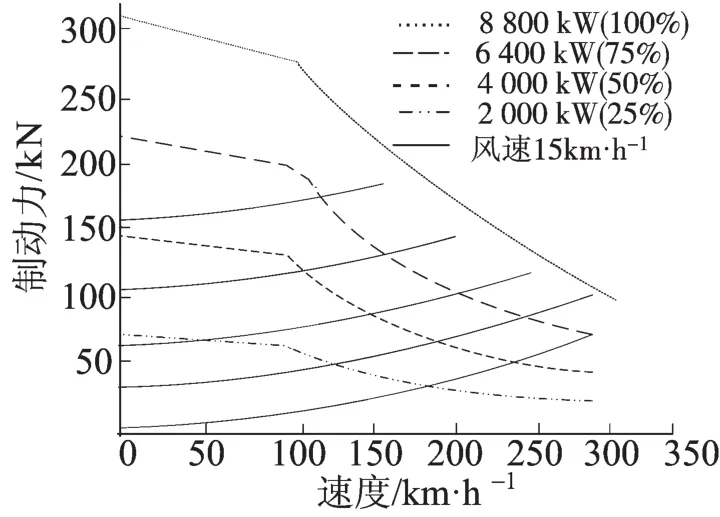
圖3 牽引力-速度模擬曲線圖Fig.3 Traction-speed simulation curve diagram
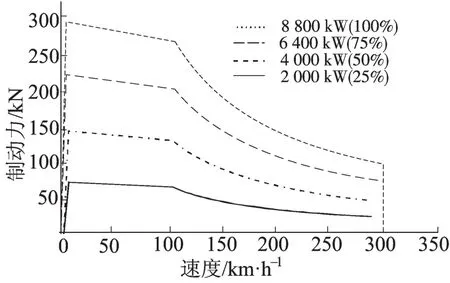
圖4 制動力-速度模擬曲線圖Fig.4 Braking force-speed simulation curve diagram
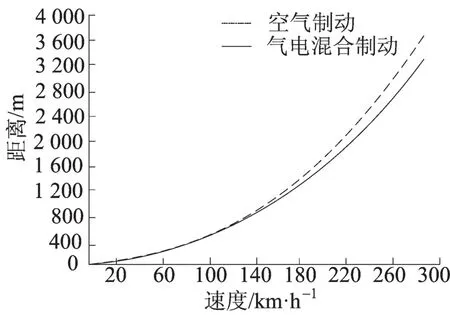
圖5 制動距離模擬曲線圖Fig.5 Braking distance simulation curve diagram
5 結論
CRH3動車虛擬駕駛仿真系統借助影像、圖形圖像、聲音、虛擬現實場景和虛擬仿真設備,逼真地再現了列車駕駛操縱界面、操作顯示設備、電氣設備、控制邏輯及網絡信息系統。系統的所有電氣、電子、機械、氣動系統的邏輯、關聯關系與真實情況一致,能夠完成模擬駕駛、故障處理、非正常行車的教學指導、教學管理和考核等功能。
CRH3動車虛擬駕駛仿真系統的開發與應用,有效地解決了學校、企業在動車司機培訓方面的兩難問題,提高了動車司機的培養培訓質量,縮短了培訓時間,節約了培訓成本,且綠色環保,經濟和社會效益良好。
[1]鐵道部.CRH3型動車組途中應急故障處理手冊[M].北京:鐵道部,2010:11-88.
[2]陳秉智,楊慧芳,兆文忠.高速動車組碰撞仿真研究[J].大連交通大學學報,2011,32(1):11-16.
[3]郭孜政,李永建,鐘永祥,等.動車組人機控制界面背景色對識別效率的影響[J].中國鐵道科學,2011,32(5):104-107.
[4]米小珍,梁樹林,兆文忠,等.面向檢修的CHR3動車組轉向架虛擬仿真系統開發[J].鐵道機車車輛,2010,30(1):32-36.
[5]馬淑紅,馬韞娟,李建群,等.京津城際CRH3動車組大風天氣條件下安全行車技術標準參數研究[J].鐵道技術監督,2009,37(2):7-9.
[6]李廣麗,張紅斌.基于虛擬現實技術的商品展示平臺研究[J].華東交通大學學報,2010,27(6):59-65.
[7]王乘,李利軍,周軍清,等.Vega實時三維視景仿真技術[M].武漢:華中科技大學出版社,2005:318-404.
[8]張昊,浦浩,胡光常,等.基于OSG的鐵路三維實時交互式可視化技術研究[J].鐵道勘察,2010,(1):3-6.
[9]沈濤,王穎峰,汪國寶,等.地鐵牽引控制單元TCU故障診斷建模與應用[J].鐵道機車車輛,2003,23(5):21-23.
[10]黃學文,劉春明,馮璨.CHR3高速動車組故障診斷系統[J].計算機集成制造系統,2008,16(10):2311-2318.
[11]周盛,余丹萍,江全元.CRH3動車組牽引傳動系統的負荷建模[J].機電工程,2011,28(1):118-122.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
辦公室業務(2020年18期)2020-09-29 12:15:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
勞動保護(2019年7期)2019-08-27 00:41:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
