永磁同步伺服系統(tǒng)全閉環(huán)建模及仿真
2012-07-02 00:51:08王景輝樂貴高
兵器裝備工程學報 2012年5期
關鍵詞:模型
王景輝,樂貴高,霍 龍
(南京理工大學 機械工程學院,南京 210094)
永磁同步電機(PMSM)因其體積小、結構簡單、輸出轉矩大、效率高等優(yōu)點,在工業(yè)控制領域得到了廣泛應用[1]。同時PMSM 是一個非線性、多變量、強耦合的時變系統(tǒng),因此需要建立其解耦狀態(tài)方程。1971年德國學者Blaschke 等[2]提出了矢量控制理論,使交流電機轉矩和磁通的控制實現(xiàn)解耦。近年來電機控制中普遍采用SVPWM 技術,提高了逆變器的電壓輸出能力,并保持恒定的開關頻率,特別適合數(shù)字控制。本文基于矢量控制的思想,采用電壓空間矢量脈寬調(diào)制的方法對永磁同步電機伺服系統(tǒng)進行仿真分析。
1 永磁同步電機矢量控制
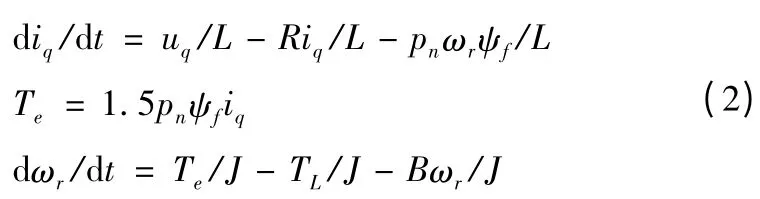
以轉子為凸裝式的永磁同步電動機為例[2]得到PMSM的電壓電流、電磁轉矩和機械運動方程為:

式中:id、iq為dq 軸電流;ud、uq為dq 軸電壓;R 為定子電阻;L 為等效dq 軸電感;Pn為極對數(shù);ψf為轉子上的永磁體產(chǎn)生的磁勢;ωr為轉子機械角速度;J 為折算到電機軸上的總轉動慣量;B 為粘滯摩擦系數(shù);TL為折算到電機軸上的總負載轉矩;Te為輸出轉矩。
從式(1)可以看出,ωr、id、iq是緊密耦合的。為實現(xiàn)交流電機的解耦控制,采用id=0 的矢量控制方式,則式(1)簡化為:
當電機軸與減速器相連,且檢測元件安裝在被控對象即減速器輸出軸上(減速器視為剛性),組成全閉環(huán)系統(tǒng),得到如下方程:

其中:θr為被控對象端角度輸出;i 為減速比。
由以上推導可以得出PMSM 空間矢量控制框圖如圖1所示。

圖1 永磁同步電機空間矢量控制方框圖
2 永磁同步電機全閉環(huán)系統(tǒng)建模
在Matlab/Simulink 下建立各個模塊仿真模型,步驟如下。
2.1 比例積分(PI)控制器
比例(P)控制的目的是快速調(diào)節(jié)系統(tǒng)偏差,積分(I)控制的目的是消除系統(tǒng)靜差,在Matlab 中的模型見圖2。

圖2 PI 模型
2.2 坐標變換模塊
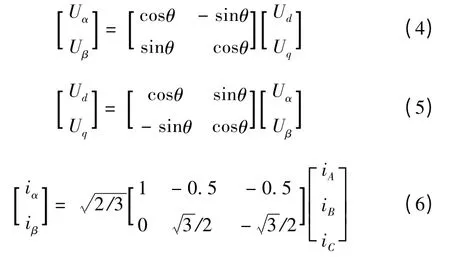
坐標變換模塊主要有從dq 旋轉坐標系到兩相靜止αβ坐標系的Park-1變換,從兩相靜止αβ 坐標系到dq 旋轉坐標系的Park 變換以及從三相靜止ABC 坐標系到兩相靜止αβ坐標系的Clark 變換其表達式如式(4)~(6)所示。
2.3 SVPWM 模塊和逆變模塊
SVPWM 的實現(xiàn)算法在相關文獻[3-5]中已有詳述,本文不再贅述,其建立主要分為幾個步驟:
1)確定空間電壓矢量所在扇區(qū)
各扇區(qū)與Uα、Uβ的關系如式(7)所示:
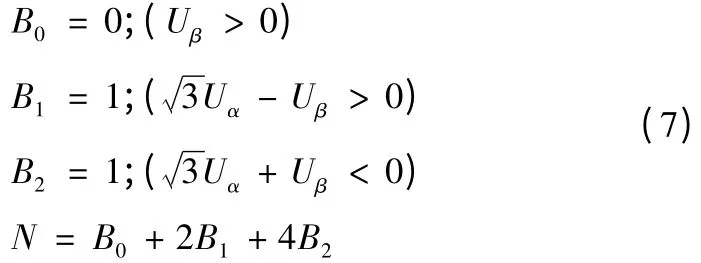
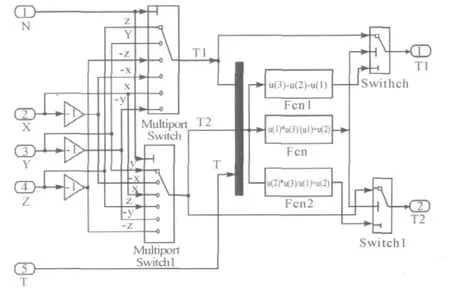
圖5 基本電壓矢量作用時間模塊
得到各扇區(qū)與N 的對應關系,模型如圖3 所示。

圖3 扇區(qū)選擇模塊
2)X、Y、Z 的計算
兩個相鄰電壓空間矢量在一個PWM 周期中的作用時間的公用公式X,Y,Z 的計算如式(7)所示,其模型見圖4。


圖4 X、Y、Z 計算模塊
3)基本電壓矢量作用時間模塊
將兩個相鄰的非零電壓空間矢量的作用時間表示為T1,T2,與X、Y、Z 的對應關系如表1。
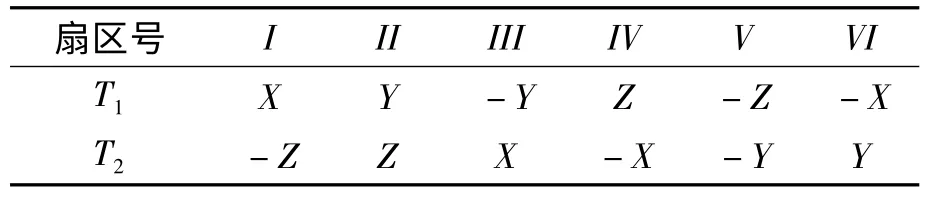
表1 基本電壓矢量作用時間計算公式
之后進行飽和判斷,當T1+T2>Tc時,

當T1+T2<Tc時,T1,T2保持不變,

其模型如圖5 所示。
4)Ta,Tb,Tc計算模塊
Ta,Tb,Tc由下式確定:

模型如圖6 所示。
5)PWM 波生成模塊
計算得到的Tcm1,Tcm2,Tcm3值與周期為T,峰值為T/2 的三角波進行比較,可以生成對稱空間矢量PWM 波形。將生成的PWM1,PWM3,PWM5 取反就可以生成PWM2,PWM4,PWM6。其模型如圖7 所示。逆變器模塊由Matlab 自帶的模型生成,直流母線電壓Udc 取230 V。
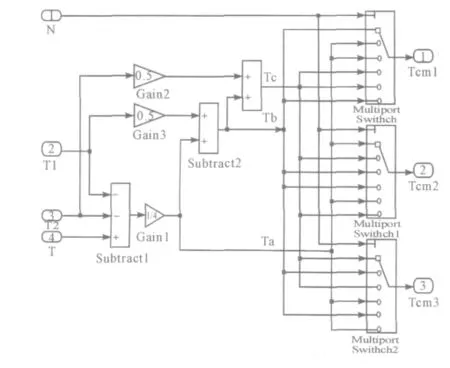
圖6 Ta,Tb,Tc 計算模塊
2.4 電機模型
永磁同步電機模型直接由Matlab 自帶的模型生成,磁通選擇正弦波模式。
2.5 檢測模塊
永檢測模塊也由Matlab 自帶的模型生成,主要由三相電流、轉子角速度、轉子角度、輸出轉矩等組成。
由以上各模塊得到完整的永磁同步電機三閉環(huán)控制系統(tǒng)仿真圖如圖8 所示。

圖7 PWM 波生成模塊
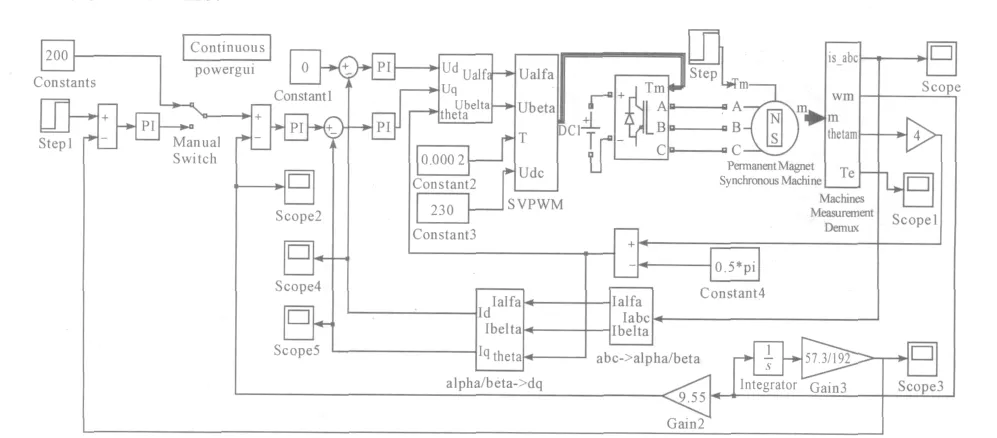
圖8 永磁同步電機空間矢量控制仿真模型
3 仿真結果
為了驗證系統(tǒng)性能及所設計的仿真模型的正確性和有效性,進行了仿真實驗。仿真參數(shù):電機轉動慣量J =2.627 ×10-3kg·m2,定子相電阻R =2.6 Ω,轉子永磁體磁勢Ψf=0.185Wb,等效電感L=5 ×10-3H,極對數(shù)pn=4,粘滯摩擦系數(shù)B=1.43 ×10-4N·m·s,減速器減速比為1∶192。
3.1 速度仿真
仿真條件為電機空載啟動,轉速給定為300 r/min,在t=0.04 s 時突加負載轉矩6 N·m。電機的轉速、轉矩曲線以及定子三相電流如圖9 ~11 所示。
從圖中可以看出,電機在空載啟動時電流、電磁轉矩迅速達到最大值,然后穩(wěn)定在正常值;在0.04 s 突加負載轉矩時,電流、電磁轉矩經(jīng)過一個輕微的振動過程后分別穩(wěn)定在一個新值。轉子角速度迅速穩(wěn)定到給定轉速,存在一定的超調(diào),突加負載時轉速有所降低,但能迅速恢復到額定狀態(tài),穩(wěn)態(tài)運行時無靜差。
3.2 位置仿真
仿真條件為電機空載啟動,位置給定為10°,在t =0.5 s時突加負載轉矩10 N·m。位置及轉矩輸出曲線如圖12 ~13 所示。
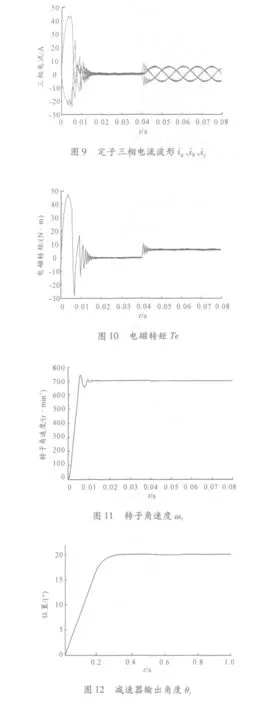
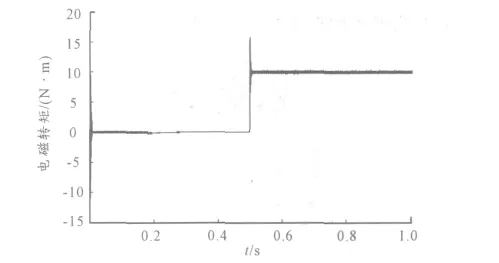
圖13 電磁轉矩Te
從圖中可以看出,位置響應快速、無超調(diào),突加負載時位置曲線幾乎不受影響,穩(wěn)態(tài)運行無靜差;電磁轉矩在電機啟動和突加負載轉矩時有明顯振蕩,但能在很短的時間穩(wěn)定在常值,且此時的位置及轉矩曲線已非常穩(wěn)定平滑。
4 結束語
本文在分析永磁同步電機矢量控制模型的基礎上,在Matlab/Simulink 環(huán)境下建立了基于空間矢量脈寬調(diào)制控制的永磁同步電機三閉環(huán)伺服系統(tǒng),采用PI 控制策略設計了系統(tǒng)的電流、速度及位置調(diào)節(jié)器,易于工業(yè)控制的實現(xiàn)。仿真結果表明,系統(tǒng)能平穩(wěn)運行,具有良好的速度響應及位置跟蹤特性,同時為實際電機控制系統(tǒng)的設計及控制研究提供了有效地手段和工具。
[1]Jianguo Zhoua,Youyi Wang. Real time nonlinear adaptive backstepping speed control for a PM synchronous motor[J].Control Engineering Practice,2005(13):1259-1269.
[2]舒志兵.交流伺服運動控制系統(tǒng)[M].北京:清華大學出版社,2006.
[3]姚緒梁.現(xiàn)代交流調(diào)速技術[M].哈爾濱:哈爾濱工程大學出版社,2009.
[4]程曉猛,陸海峰.用于逆變器死區(qū)補償?shù)目臻g矢量脈寬調(diào)制策略[J].清華大學學報:自然科學版,2008,48(7):1077-1080.
[5]沈艷霞,吳定會.永磁同步電機位置跟蹤控制器及Backstepping 方法建模[J].系統(tǒng)仿真學報,2005,17(6):1318-1325.
[6]張森,石航飛,陳志錦,等.基于DSP 的永磁同步電機的矢量控制[J].兵工自動化,2011(10):71-74.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
