S模式地面二次監視雷達及其關鍵技術分析?
2012-06-24 14:33:48蘭鵬曾一江王凌
電訊技術 2012年6期
蘭鵬,曾一江,王凌
(1.中國西南電子技術研究所,成都610036;2.成都工業學院電氣與電子工程系,成都611730;3.海軍裝備部重慶局,重慶400043)
S模式地面二次監視雷達及其關鍵技術分析?
蘭鵬1,曾一江2,王凌3
(1.中國西南電子技術研究所,成都610036;2.成都工業學院電氣與電子工程系,成都611730;3.海軍裝備部重慶局,重慶400043)
介紹了S模式地面二次監視雷達的組成和工作原理,結合實際情況與工程經驗提出了實現S模式二次監視雷達的關鍵技術,并逐一進行了論述,最后提出了我國空管監視技術從A/C模式過渡到S模式的建議。
二次監視雷達;S模式;數據鏈;GDLP;ADLP;單脈沖技術
1 引言
S模式是近年發展起來的一種新的空中交通監視技術,相對傳統的A/C模式二次監視雷達,采用了選址詢問,擴展了數據鏈,擴充了系統容量,降低了系統內部干擾,因而在美、歐等國家和地區得到了廣泛應用,同時也是國際民航組織推薦使用的一種空管模式。而我國空管發展比較緩慢,目前還普遍使用的是A/C模式,但隨著空中交通的發展,飛機密度的增加,勢必也會向S模式監視系統發展。正因為我國目前還沒有采用S模式,因而有關S模式的系列標準也沒有頒布,系統性論述的相關文獻也很少。有些文獻認為,通過對傳統A/C模式二次監視雷達進行簡單的升級就可以實現S模式,筆者認為S模式除了在工作頻點上與傳統的A/C模式相同外,是完全不同的兩個系統,特別是S模式的數據鏈功能,以及地面站的協同功能,使得S模式的控制相當復雜;同時,S模式地面二次監視雷達是一個逐步更換的過程,在實施過程中,S模式二次監視雷達必須考慮兼容現有的傳統的A/C模式,因而S模式二次監視雷達必須經過全面細致的設計才可能充分發揮S模式的效能。
本文主要針對實現地面二次監視雷達的關鍵技術進行論述。
2 S模式二次監視雷達系統簡述
S模式二次監視雷達系統是在傳統的A/C基礎上發展起來的,也是采用詢問應答協同的工作方式,因而S模式二次監視雷達系統包括具有S模式能力的地面二次雷達詢問機和機載應答機兩部分。國際民航組織為每架飛機分配了一個唯一地址(24位地址)[1],地面站可以對飛機進行選址詢問,詢問發射頻率為1 030 MHz,接收頻率為1 090 MHz,詢問上行信號如圖1所示,前2個脈沖為同步脈沖,P5為詢問旁瓣抑制脈沖,P6為信息脈沖,采用DPSK調制,信息位長56 bit或112 bit,56 bit稱為短信號格式,主要用于監視,112 bit稱為長信號格式,除用于監視外還需要傳輸數據信息,也就是數據鏈功能都采用長信號格式,其碼速率為4 MHz。應答下行信號如圖2所示,前4個脈沖是同步脈沖,后面56個脈沖或112個脈沖也分為長格式和短格式,采用脈位調制,碼速率為1 MHz。
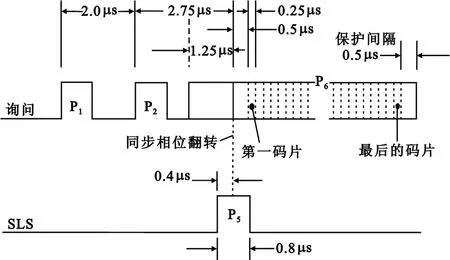
圖1 詢問上行格式Fig.1 Uplink format of interrogation

圖2 應答下行格式Fig.2 Downlink format of reply
國際民航組織(ICAO)附件10中分別對上行和下行定義了S模式的24種格式,其中上行格式4、5、11、20、21、24用于二次監視雷達監視系統,0和16號格式用于ACAS系統,為以后擴展保留了17種格式;下行格式中,4、5、11、20、21、24用于二次雷達監視系統,0和16號格式用于ACAS系統,17、18、19號格式用于ADS-B,其中19號格式為軍用。在二次監視雷達使用的幾種格式中,11號格式是全呼詢問和應答,主要用于對空中目標的捕獲,以獲取空中目標的S模式地址,4號和5號格式主要用于監視,以替代傳統的A/C模式,4號格式傳輸高度信息,5號格式傳輸編號信息,20、21號格式主要用于數據傳輸,同時具有監視功能,24號格式主要用于擴展通信功能。在S模式數據鏈的功能上主要分為通信A、通信B、通信C和通信D 4種,上行20、21號格式主要用于通信A,下行20、21主要用于通信B,上行24號格式用于通信C,下行24號格式用于通信D。通信A又分為廣播通信A和一般通信A,廣播通信A用于地面站向覆蓋范圍內的空中目標發送廣播信息,一般通信A用于地面站對特定的飛機發送信息;通信B又分為地面發起的通信B(GICB)、空中發起的通信B(AICB)和廣播通信B等[1-2]。
3 S模式二次監視雷達組成及工作原理
S模式地面二次監視雷達主要組成如圖3所示,包括天線系統、發射機、接收機、信道管理器、S模式回答處理器、A/C模式回答處理器、航跡處理、數據管理以及接口管理等部分。

圖3 S模式地面詢問機組成框圖Fig.3 Mode S SSR composition block diagram
天線系統包括∑、Δ、Ω三通道單脈沖天線,和傳統A/C模式二次監視雷達一樣,為了減少垂直反射的影響,采用大垂直孔徑天線。由于S模式詢問機需要同時發射P6脈沖和旁瓣抑制脈沖(P5脈沖),發射機需采用主、輔兩個發射機,主發射機發射信號脈沖和同步脈沖,輔助發射機發射旁瓣抑制脈沖,接收機采用三通道接收,∑、Δ通道接收機配合∑、Δ單脈沖天線,實現單脈沖測角,∑、Ω實現接收旁瓣抑制功能,分別采用S模式和A/C模式兩個獨立的回答處理器,實時的對每次回答進行信號處理,以得到每次回答的解碼值;A/C模式凝聚器主要對駐留波束內的A/C模式回答進行凝聚,剔除異步干擾等;信道管理器主要對波束內要處理的S模式詢問(包括數據傳輸任務)以及A/C模式詢問進行時序上的管理;鏈路管理器主要完成通信任務與跟蹤目標的配對、對活動列表的管理。
4 S模式二次監視雷達關鍵技術
4.1 S模式與A/C模式的兼容性
雖然S模式采用了點名詢問,但在跟蹤前是不知道空中目標的S模式地址,當S模式二次監視雷達工作在多站情況下,可以通過相鄰地面站的引導實現對目標的跟蹤,但大多情況下需要自身對目標進行捕獲,只有捕獲鎖定后的目標才能進行點對點的數據傳輸。S模式目標的捕獲是采用全呼詢問,跟蹤和數據傳輸采用選址詢問,鎖定后的目標不再對S模式全呼詢問進行應答,為了方便管理和減少干擾,實際實施時,采用全呼和選址詢問分時進行,其時序如圖4所示,包括一個全呼詢問周期跟一個輪詢周期,在輪詢周期內實現選址詢問。

圖4 S模式二次監視雷達工作時序Fig.4 Mode S SSR time-sharing
考慮到從傳統的A/C模式升級到S模式需要一定的時間過渡,因而國際民航組織在制定S模式標準時,充分考慮了A/C模式與S模式的兼容問題,使得A/C模式二次雷達監視系統與S模式二次雷達監視系統可以共存。在全呼詢問時,對傳統的A/C模式信號進行了改進,增加了P4脈沖,如圖5的信號格式稱為組合詢問信號格式,對于傳統的A/C模式應答機只識別P1~P3脈沖,并按識別的P1與P3的時間間隔確定詢問模式,對于S模式應答機需要識別P4脈沖,P4為寬脈沖(1.6μs)時表示對所有應答機進行全呼詢問,P4為窄脈沖(0.8μs)時表示僅對A/C模式應答機進行詢問,S模式應答機接收到該信號不應答。但在實際使用中,人們更喜歡采用UF11號僅S模式全呼和短的組合詢問格式(僅A/C模式回答)組成的時序對空中目標進行全呼詢問,如圖6所示,這樣在同樣覆蓋范圍內的S模式應答機和A/C模式應答機具有相同的接收時間窗,A/C模式應答機也有足夠的時間從抑制A/C模式(僅S模式全呼)中恢復。

圖5 組合詢問信號格式Fig.5 Intermode interrogation format

圖6 A/C模式和S模式全呼組合時序Fig.6 Combined interrogation scheduling
4.2 S模式信道管理
由于S模式既要完成監視功能又要完成數據鏈功能,同時還要兼容傳統的A/C模式,因而如何有序地安排和管理地面雷達在波束覆蓋范圍內目標的通信和監視任務顯得尤為重要。S模式地面二次監視雷達需要一個專用的信道管理器來完成這些任務,其原理主要包括信道控制、事務預處理、目標列表更新、輪詢進程安排和事務更新,如圖7所示。信道控制實時監視時鐘和天線指向,保證所有S模式和A/C模式活動都發生在恰當的時間和序列(波束駐留時間),每間隔一定時間,信道控制就指示事務預處理器提供即將進入波束的飛機清單;事務預處理查詢包含目標預測位置的監視文件,如果將要進入波束的飛機有上行鏈路信息或下行鏈路信息需處理,那么事務預處理就會確定要完成這些任務所需要處理的數目和類型,事務預處理為每架飛機創建一張表單,表單包括一套要完成所有待處理的監視與通信任務所需要的完整說明;目標列表更新器組合這些表單為活動列表,并定期更新,表單上的條目是由事務預處理器所闡明的數據塊。新目標中的數據塊由事務預處理提供,并且被并入此列表,而那些離開波束或完成服務的目標,都會被清除。為了更好地估計算一個詢問與應答的非沖突時序,活動目標列表是以目標距離遞減的方式進行排序。事務更新是針對具有多任務的目標,對于有多任務的目標原則上是安排連續進行,如果某項任務成功進行,就會修改目標的數據塊,以安排下一任務進行;如果某項任務進行不成功,會安排在下一時序繼續進行;輪詢進程安排信道管理器的輸出時序,其原則是基于目標的距離,最遠的先問,后續安排的詢問目標,其回答不會與前一詢問的回答交替,如果沒有足夠的時間來完成一個完整的時序安排,那么就會安排到下一循環進行。圖8是一個信道管理輪詢實例,在第1個循環實現了對4架飛機的詢問,在第2個循環實現了對2架飛機的詢問,從該圖也可以看出,合理進行信道管理可以大大提高信道的利用率。

圖7 信道管理原理框圖Fig.7 Channel management block diagram

圖8 輪詢實例Fig.8 An example of roll-call
4.3 S模式鏈路管理
S模式地面二次監視雷達為S模式地-空數據鏈提供物理層和部分鏈路層的服務,S模式數據鏈功能主要包括通信A、廣播通信A、GICB(Ground-initiated Comm-B)和AICB(Air-initiated Comm-B)等多種形式,實現這些數據鏈功能需要與地面數據鏈處理器(GDLP)和機載數據鏈處理器(ADLP)配合工作,如圖9所示。對于進入地面二次監視雷達覆蓋區的空中目標,地面二次監視雷達是靠定向天線實現與指定目標的通信,對一特定的飛機,每次掃描的波束駐留時間只有幾十毫秒,對于飛機密度較大的區域,如果通信任務較多,勢必有些目標的通信任務不能在一次掃描完成,需要多次掃描,如何有序地實現與空中目標的通信,在天線指向目標前將具有通信任務的目標和任務種類提供給信道管理器,需要建立一個活動信息列表,這個活動信息列表是對地面二次雷達覆蓋區域內的所有S模式目標列表,對新跟蹤的目標需要及時加入活動列表,并建立與GDLP的鏈路連接,對飛出覆蓋區的目標及時終止與GDLP的鏈接,并從活動信息列表中剔除,二次雷達只從GDLP接收在覆蓋區內目標的通信任務,對活動列表中具有通信任務的目標進行長格式詢問,對沒有通信任務的進行監視詢問(短格式詢問),在活動信息列表的建立中,詢問機需要將通過監視獲得的目標位置信息與通過GDLP獲得的通信任務進行配對,并分類進行管理,對未完成的通信任務進行更新。圖10是GICB鏈路管理實例。

圖9 S模式數據鏈功能框圖Fig.9 Mode S datalink functional block diagram
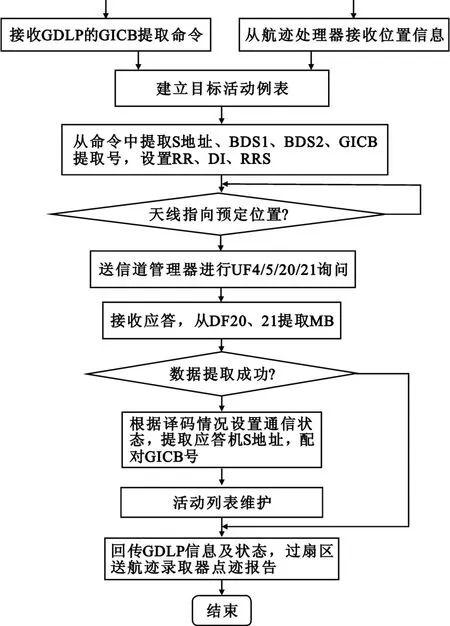
圖10 GICB控制流程Fig.10 Control flow of GICB
4.4 S模式目標的捕獲
S模式二次監視雷達主要采用選址詢問方式進行工作,但這只是在建立了目標跟蹤的情況下,在對目標跟蹤之前,需要對目標進行捕獲、鎖定,以最大限度地減少系統的異步干擾。一旦被捕獲,S模式飛機對隨后的S模式全呼叫詢問進行閉鎖,此閉鎖條件由S模式地面站通過S模式選址詢問控制,如果因任何原因致使一架飛機在18 s左右沒有接收到地面站的閉鎖命令選址詢問,將自動解鎖,以便普通S模式捕獲可重新捕獲飛機。
如何快速捕獲S模式目標,可以采用多種捕獲技術,包括多站捕獲與閉鎖、非選擇性捕獲與閉鎖、集群詢問機捕獲與閉鎖,以及隨機捕獲等多種方式。S模式為每個具有共同覆蓋區的地面詢問機分配了了一個詢問識別符(Ⅱ碼)和監視識別符(SI碼),并要求應答機能夠根據Ⅱ碼和SI碼具有多站閉鎖,針對不同的Ⅱ碼和SI碼鎖,對應多達78個地面詢問機的全呼捕獲詢問;非選擇捕獲與閉鎖,是建立在Ⅱ=0的基礎上,與S模式子網協議不兼容,不能用于普通的S模式捕獲;集群詢問機捕獲與閉鎖,是地面使用相同詢問標識符的詢問機通過地面網路協調它們的監視和通信任務,不需要每個詢問機都去捕獲目標;隨機捕獲,S模式地面站用一個特殊全呼叫詢問命令進行詢問,此命令指示飛機用一個特定的小于1的應答概率進行應答,由此降低的應答率意味著有些全呼叫應答被正確接收,并且這些飛機將被捕獲。一旦一架飛機被捕獲,它就被閉鎖,就不會再干擾其他尚未被捕獲飛機的全呼叫應答,這一過程一直重復,直到所有的飛機被捕獲,這種捕獲文獻[3]中已有詳細介紹。
4.5 單脈沖技術
S模式二次監視雷達要求一次詢問、應答就能獲得目標信息,這其中包括目標數據傳輸信息和監視獲得的目標位置信息,而傳統的滑窗技術需要多次詢問才能獲得理想的位置信息,很難滿足S模式的要求,因而對于S模式地面詢問機必須采用單脈沖技術,其原理如圖11所示。

圖11 單脈沖原理框圖Fig.11 Monopulse principle block diagram
通常二次監視雷達采用比幅單脈沖技術進行測角,根據接收到的∑、Δ通道的脈沖的幅度值計算出Δ/∑,由Δ/∑與偏離天線的法向值(OBA)的關系查表得到OBA值,與實時采集的天線指向值相加或相減得到目標的方位角,根據∑、Δ通道的相位超前滯后關系,判斷目標在法線左邊還是右邊,以決定目標方位是加OBA值還是減OBA值。
此外單脈沖技術除用于測角外,也用于多目標處理。
5 S模式二次監視雷達接口要求
S模式二次監視雷達接口主要分為內部接口和外部接口,內部接口主要包括地面站詢問機與詢問天線的接口、詢問機與本地控制盤的接口、詢問機與維護顯示器的接口,與天線的接口包括∑、Δ、Ω三通道射頻接口和天線指向數據,天線指向信號采用增量編碼方式,一路方位脈沖,一路正北脈沖;與本地控制盤的接口主要完成本地控制盤對詢問機的工作參數進行設置,并實時監視詢問機的狀態,采用RS422接口;與本地維護監視器的接口主要對目標的航跡進行監視,采用RS422接口或網絡接口。與外部設備的接口包括與空中交通管制中心的接口、與GDLP的接口、與本地用戶的接口、與其他鄰近地面站系統工作接口,實現S模式數據鏈功能與空管中心的監視接口和GDLP接口是必需的,與鄰近地面二次監視雷達接口在多站協同工作時需要,對外接口都采用雙冗余網絡接口,如圖12所示。

圖12 S模式地面二次監視雷達接口框圖Fig.12 Mode S SSR interface block diagram
與空中交通管制中心接口,主要向交通管制中心傳輸目標點跡/航跡報文,通常采用網絡接口。由于我國還沒有相應標準,我們參照歐洲航空組織監視數據交換報文CAT48《單站雷達目標發送報文》[4]執行。
與地面數據鏈處理器GDLP的接口主要與GDLP進行雙向數據交換,將從飛機上提取的數據發送給GDLP,把GDLP傳來的數據通過二次監視雷達發送給飛機,同樣采用網絡接口,參照歐洲航空組織監視數據交換報文CAT18《S模式數據交換信息》[5]執行。
6 S模式二次監視雷達鏈路計算
S模式二次監視雷達鏈路計算同樣遵從二次雷達的計算公式[6]:

式中,Prcc為接收機輸入口的接收功率,單位W;Ptrd為發射機在輸出口的發射功率,單位W;GA為地面二次監視雷達天線增益;GT為應答機天線增益;LI為二次監視雷達到天線之間電纜損耗和;Lt為應答機到天線之間電纜損耗和;Lat為大氣衰減;λ為波長,單位m;R為地面站和應答機天線之間的距離,單位m。
在下行鏈路計算時,考慮到S模式必須采用單脈沖技術進行測角,系統應該留有足夠的余量。
7 結束語
S模式二次監視雷達具有監視、數據鏈功能,相比傳統的A/C模式具有很多優勢,是國際民航空中交通監視技術的發展方向,既可以采用單站工作方式也可以采用多站地面協同工作方式,其控制流程相當復雜。國內這方面的文獻很少,國際民航組織也僅僅給出了一些規范性的要求,對其實施方式并沒有作詳細的規定。隨著我國民用航空事業的發展,空中交通密度的增加,在從傳統A/C模式監視系統過渡到S模式監視系統的過程中,建議針對S模式二次監視雷達的具體特點,制定和完善一系列S模式二次監視雷達的實施標準及規范,才能逐步推行,這樣才能最大發揮S模式的效能。
[1]ICAO Annex 10 Volume IV,Surveillance and Collision Avoidance Systems[S].
[2]Doc9684 An/951,Manual on the Secondary Surveillance Radar(SSR)Systems[S].
[3]王亞濤.空管二次雷達S模式詢問機目標捕獲與監視實施方案[J].電訊技術,2010,50(7):71-75.
WANG Ya-tao.Target Capture and Surveillance Method for Mode S Air Traffic Control SSR Interrogator[J].Telecommunication Engineering,2010,50(7):71-75.(in Chinese)
[4]Eurocontrol Standard Document for Surveillance Data Exchange Part 4[S].
[5]Eurocontrol Standard Document for Surveillance Data Exchange Part 6[S].
[6]Stevens M C.Secondary Surveillance Radar[M].New York:Artech House,1998.
LAN Peng was born in Pixian,Sichuan Province,in 1964.He is now a senior engineer of professor.His research direction is SSR.
Email:lanp-003@163.com
曾一江(1964-),女,重慶人,副教授,主要研究方向為電子技術;
ZENG Yi-jiang was born in Chongqing,in 1964.She is now an associate professor.Her research direction is electronic technology.
王凌(1978—),男,陜西韓城人,工程師,主要研究方向為二次雷達。
WANG Ling was born in Hancheng,Shaanxi Province,in 1978.He is now an engineer.His research direction is SSR.
Ground Mode S Secondary Surveillance Radar and its Key Techniques Analysis
LAN Peng1,ZENG Yi-jiang2,WANG Ling3
(1.Southwest China Institute of Electronic Technology,Chengdu 610036,China;
2.Department of Electrical and Electronic Engineering,Chengdu Technological University,Chengdu 611730,China;3.Chongqing Military Representative Bureau of Navy Equipment Department,Chongqing 400043,China)
The composition and principle of ground Mode S SSR(Secondary Surveillance Radar)are introduced. Key techniques to implement Mode S SSR are put forward and discussed,according to authors′practical work experience.Finally,some suggestions for developing China′s air traffic surveillance technology from A/C Mode to Mode S are given.
SSR;mode S;datalink;GDLP;ADLP;monopulse technique
TN958.96
:A
10.3969/j.issn.1001-893x.2012.06.002
蘭鵬(1964—),男,四川郫縣人,研究員,主要研究方向為二次雷達;
1001-893X(2012)06-0840-06
2012-02-20;
2011-04-17