航天器交會對接激光雷達成像技術
2012-06-23 06:42:58易予生陳曉光
電子科技 2012年10期
關鍵詞:測量
易予生,陳曉光,劉 超
(中國空間技術研究院載人航天總體部,北京 100094)
空間交會對接測量技術主要是對兩個或多個航天器在交會對接時的相對軌道位置、速度和姿態角等參數進行測量,是空間補給、空間組裝及空間救援等任務的核心支撐技術,也是國內載人航天工程第二步戰略的關鍵技術。隨著載人航天技術逐步成熟和空間站的發展,永久性國際空間站(ISS)長期建設,這都需要空間交會對接技術。因此,隨著人類空間活動范圍的不斷擴大,空間交會對接技術將會發揮重要作用。
到目前為止,以蘇、美為代表的航天大國在不斷地研究空間交會對接新的測量方法,各種先進的測量傳感器不斷地被提出并設計出來,交會微波雷達,絕對GPS與相對(差分)GPS測量,激光雷達在不同的交會對接任務或試驗中不斷得到應用。激光雷達由于激光本身的波束窄、相干性好、工作頻率高等優點,能在交會階段直到對接的整個過程中提供高精度的相對距離、速度、角度和角速度的精確測量,能夠獲取目標飛行器的三維圖像,可輔助航天員完成手動交會對接,從而為交會對接提供了一種手段[1-5]。
針對交會對接的任務特點,借鑒國際上先進激光雷達發展趨勢,文中提出了基于脈沖測距方法的激光雷達成像方案,并對交會對接過程中交會對接面成像進行了仿真驗證。
1 激光器選擇
目前常用的激光成像雷達有二氧化碳成像激光雷達和二極管泵浦固體式成像激光雷達。CO2氣體激光器是一種典型的分子氣體激光器。其利用CO2分子的振動和轉動能級間的躍遷來產生激光的,激光的波長為10.6 μm。優點是:(1)對人眼安全。(2)傳輸性能好。(3)有較大的傳輸功率和能量轉換效率。缺點是:需要低溫制冷,并需要設計特別的前置放大器,以適應接收探測器的低噪聲,增加了成本、體積和重量。固體激光器以其高可靠性、技術成熟等優點在激光成像領域中得到了廣泛發展。其中,二極管泵浦YAG激光器成為一個重要的發展方向。二極管泵浦YAG激光器具有輸出功率高、壽命長的優點,并且泵浦的效率高,可達20%左右,體積小,重量輕,適于小型化應用。其不足之處在于結構復雜,成本較高[6]。
結合液體激光器和固體激光器的特點,針對載人航天器交會對接任務的特點和需要,以及空間環境的限制,激光設備應盡可能的做到體積小,重量輕。因此,文中激光器選擇二極管泵浦固體式 YAG激光器。
2 測距原理
激光測距是激光雷達三維成像的基礎,目前常用的測距方法有脈沖法、相位法、干涉法和三角法等[7-8]。文中采用脈沖法進行激光雷達測距。脈沖激光測距是利用激光傳播往返時間差的測量來完成的。脈沖激光測距原理是用脈沖激光器向目標發射一列較窄的光脈沖(脈沖寬度小于50 ns),光達到目標表面后部分被反射,通過測量光脈沖從發射到返回接收機的時間τ,可算出雷達與目標之間的距離L。即

3 掃描方式
激光成像雷達利用激光束對前方的視場空間進行掃描,因為激光的波長較短,在目標平面上表現為一個極小的光斑,為達到對前方視場空間進行細節性掃描,選用掃描方式十分重要。一般地,激光成像雷達系統采用的掃描方式有正弦掃描、光柵掃描、逐列掃描等方式。在文中采用逐列掃描方式,如圖1所示。
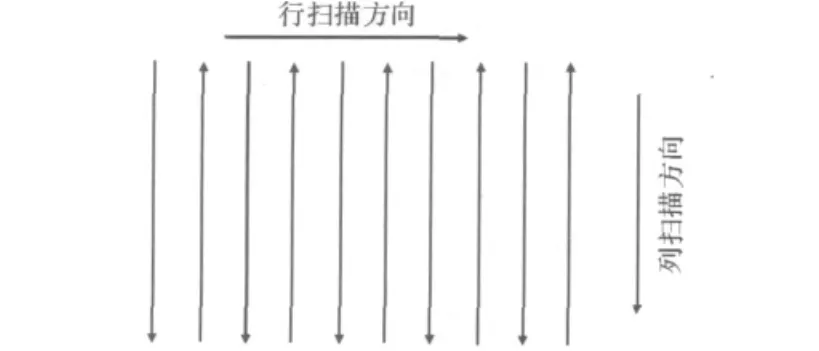
圖1 激光掃描方式
在激光掃描反射成像系統中,激光波長λ、掃描方向上有效掃描孔徑D決定了激光衍射極限光束角的大小

式中,α為比例系數,通常取1。
一般情況下,成像系統通過增大光學系統口徑的方法提高成像角分辨率,在感光元件的像素分辨率一定時,通過加長焦距提高成像分辨率。
為獲得足夠強度的信號回波和便于后續的信號處理,掃描激光束必須在每一探測單元上停留足夠長時間。對于脈沖激光雷達,其最大測量距離Rmax決定了脈沖重復頻率fr的最大值

式中,c是光速。
4 激光雷達系統的構像方程
構像方程是指目標點在激光雷達系統中的坐標(x,yz)和其在地面對應點的大地坐標(X,Y,Z)之間的數學關系。根據攝影定理的基本原理,這兩個對應點應和傳感器的投影中心點呈共線關系,可以用共線方程來描述。
為建立圖像點與目標點之間的數學關系模型,需要在像方和目標方定義坐標系,如下圖2所示。
傳感器坐標系:原點OS:掃描器激光發射中心,U軸:平臺飛行方向,V軸:與XYZ-O構成右手三維坐標系,W軸:指向天頂方向。
地面坐標系:原點O:地球質心,X軸:指向本初子午線與地球的交點,Y軸:與XYZ-O構成右手三維坐標系,Z軸:指向真北極。
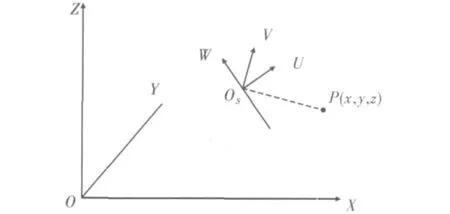
圖2 像方和目標方坐標系
設目標點P的地面坐標為(X,Y,Z)P,P在傳感器坐標系中的坐標為(U,V,W)P,投影中心S在地面坐標系中的坐標為(XS,YS,ZS),傳感器的姿態角為(φ,ω,κ),則通用構像方程為
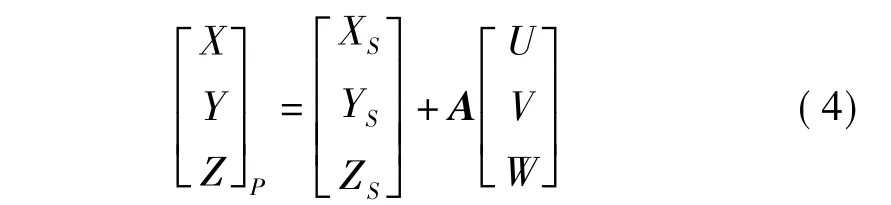
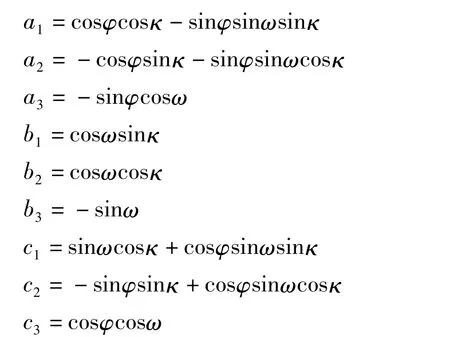
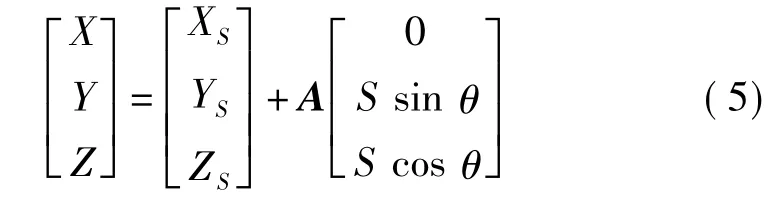
在此系統中,外方位元素為(XS,YS,ZS,φ,ω,κ),起點OS為遙感器主光學系統的投影中心,其坐標(XS,YS,ZS)可利用動態差分GPS給出:向量S的模S可用激光測距儀測量投影中心到地面待定點的距離得到;姿態參數(φ,ω,κ)分別表示俯仰角、側滾角和偏航角,可利用高精度姿態測量裝置進行測量;掃描線方向與Z軸夾角θ由編碼器按固定的激光脈沖間隔給出。對于每一個脈沖有:X=0,Y=sinθ,Z=Scosθ。代入構像方程,即有
下圖3為交會對接時目標飛行器和飛船的幾何示意圖。其中3為激光雷達,6為2#合作目標安裝面。
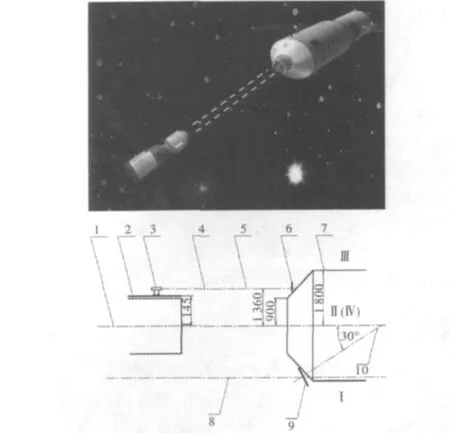
圖3 交會對接時目標飛行器和飛船幾何示意圖
根據提出的成像方案,激光器對目標區域進行X方向和Y方向二維波束掃描;進行過門限檢測,獲得強散射點的X方向角度θ和Y方向角度φ。根據幾何關系,計算散射點水平坐標和高度坐標,即獲得地面三維立體圖像。
5 仿真驗證
為了驗證上述算法的可行性,首先對一平面進行成像仿真。該平面由的點陣組成,高度均為0 m。設光學系統的波長為1550 nm,有效口徑20 cm,帶寬取為工作頻率的3%~10%。
圖4為采用文中方法的成像結果。其中,圖4(a)為仿真得到的原始圖像,圖4(b)為仿真成像結果。由圖4(a),圖4(b)可看出,采用文中方法得到的成像結果與原始圖像一致。平面中間區域成像效果較好,邊緣部分精度變差。但在圖像邊緣測得的最大誤差也僅為0.01 m。
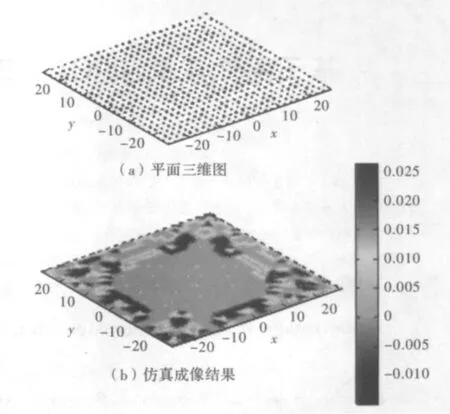
圖4 平面地形成像仿真結果
為進一步驗證文中算法的有效性,作為對比,圖5(a)給出了一隨機起伏的場景,該場景同樣由的點陣組成,其他參數同上。圖5(b)為成像結果。由仿真結果可見,成像結果與仿真原始地形一致。
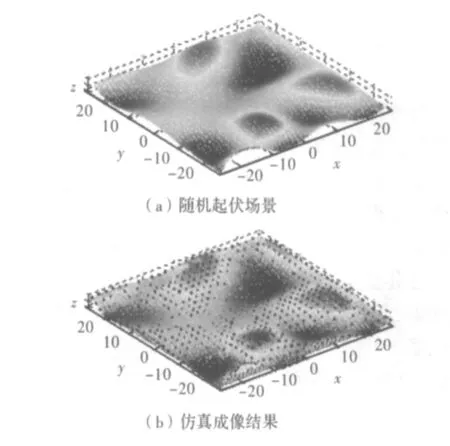
圖5 隨機起伏場景成像仿真結果
6 結束語
針對交會對接任務的需要,文中提出了基于脈沖測距方法的激光雷達三維成像方法。首先根據交會對接任務的特點,對激光器進行了對比和選擇,通過采用逐點掃描的方法測量每個散射點的距離,通過構像方程得到了真個場景的圖像。通過該方法對平面場景和隨機起伏場景進行了成像仿真,仿真結果與設定的場景一致,驗證了該校正方法的有效性和正確性,從而為國內交會對接提供了參考。
[1]DURAND Y,MEYNART R A C,MORAN A D,et al.Results of the pre-development of ALADIN[C].The Direct Detection Doppler Wind Lidar for ADM/AEOLUS,SPIE,2004.
[2]DAVID M W,WILLIAM H,CHRIS H.Status and performance of the CALIOP LIDAR [C].The Direct Detection Doppler Wind Lidar for ADM/AEOLUS,SPIE,2004.
[3]DURAND Y,MEYNART R,ENDEMANN M,et al.Manufacturing of an airborne demonstrator of ALADIN[C].The Direct Detection Doppler Wind Lidar for ADM/AEOLUS,SPIE,2005.
[4]劉燕京.關于新一代激光雷達系統[J].測繪科學,2003(1):59-60.
[5]倪樹新,李一飛.軍用激光雷達的發展趨勢[J].紅外與激光工程,2003(2):111-114.
[6]李樸蓮.三維成像激光雷達技術最新發展與展望[J].國防技術基礎,2003(1):40-41.
[7]張云,吳謹,唐永新.合成孔徑激光雷達[J].激光與光電子學進展,2005(7):48-50.
[8]倪樹新.新體制成像激光雷達發展評述[J].激光與紅外,2006(9):732-736.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00