微電網系統控制器研究
2012-06-22 07:29:24李延新張兆云
電氣技術 2012年8期
李延新 張兆云
(國電南瑞科技股份有限公司,廣東 深圳 518054)
近來年,分布式發電(DG)和微電網系統獲得了越來越多的重視和研究[1-4]。在我國微電網的實施不僅能夠促進風光等可再生能源發展,提高電力系統的可靠性,解決偏遠地區的電力應用,而且最終將會降低終端用戶的用電成本,使得電力系統更安全更經濟。分布式新能源以及當地負荷組成相對獨立運行的微電網會逐漸成為一種趨勢,成為智能電網的重要組成部分。
目前我國微電網通常由分布式新能源(DG)和儲能設備(DS)構成,分布式新能源一般為幾千網到幾百千瓦的光伏電池太陽能發電系統或直驅式風力發電系統,同時微電網中也會配置蓄電池、超級電容器等儲能設備(DS),增加系統的慣性。這類微電網處于孤島運行模式時,儲能裝置會快速地轉換為定電壓和定頻率控制模式(V/ f控制),其功率輸出可控,能夠足夠快地隨負荷波動,向微電網中的其他分布式新能源提供電壓和頻率參考,而其他分布式新能源則一直采用定功率控制。孤網下,儲能裝置的控制器為主控制器,其他的控制器為從控制器,各從控制器將根據主控制器來決定自己的運行方式。這就是微電網的主從控制模式。
系統控制器是微電網控制系統的重要組成部分[5],在并網和孤網運行方式下,維持微電網運行時功率和頻率的穩定,盡可能提高清潔能源的利用。在微電網中,系統控制器的控制策略是維持電網的電壓和頻率的關鍵。
1 微電網模型
本文以華北電網圍場御道口風、光、儲村莊模式為目標系統進行建模和仿真。村莊模式建設內容包含光伏發電、風力發電、儲能、低壓集電和配電、微電網監控和能量管理、電能計量、電能質量監測和治理、接入公用配電網、通信等9個子系統,最終形成一個低壓0.4kV的微電網運行系統。該微電網中既可以并網運行,也可以孤網運行。該微電網的主要新能源包括:50kW光伏發電系統兩套;60kW直驅型風力發電兩臺;100個6.4V/200Ah的鉛酸蓄電池組成的儲能系統一套。同時微網中的負荷包括當地農戶用電負荷以及可調負載。圖1是該微電網的仿真系統結構圖。
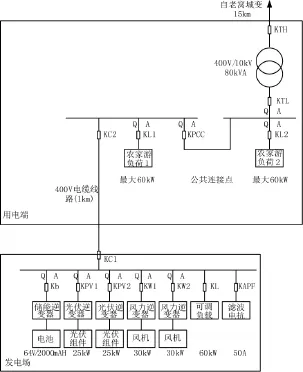
圖1 微電網仿真系統結構圖
采用了 PSCAD對該微電網系統進行仿真。光伏發電系統的模型如圖2所示。光伏逆變器由光伏電池、Boost電路以及逆變器電路3部分構成[6]。其中光伏電池部分將太陽能轉變為直流,輸入參數包括光照強度和溫度;Boost電路主要完成最大功率跟蹤(MPPT)功能;逆變電路將直流變換為交流。
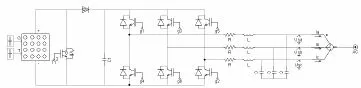
圖2 光伏發電系統仿真模型
直驅型風力發電系統包括風力機、永磁同步電機、整流電路和逆變電路4部分。除了風力機部分外的直驅型風力發電系統模型如圖3所示。其中風力機輸出的轉矩為同步電機的輸出轉矩;永磁同步電機將機械能轉換為頻率和幅值不恒定的交流量;整流回路將不穩定的交流量變換為直流;逆變回路將直流變換為頻率和幅值恒定的交流。
微電網中儲能系統采用鉛酸蓄電池。鉛酸蓄電池模型一般有一階基本模型、一階改進模型、Thevenin等效模型、三階非線性動態等效模型[7]等。本文采用的是三階非線性動態等效電路模型。蓄電池發電系統由蓄電池和逆變器兩部分組成,仿真模型如圖4所示。
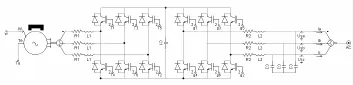
圖3 直驅風機仿真模型
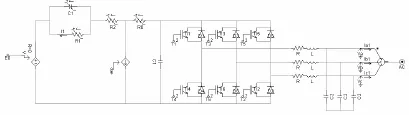
圖4 蓄電池仿真模型
該模型中光伏逆變器和直驅風機采用 PQ控制模式。蓄電池儲能系統可以工作在PQ模式或者V/F模式。在并網的時候蓄電池采用 PQ控制,孤網運行時采用V/F控制。通過仿真可以了解微電網的并網擾動特性、并網和解裂過程、孤網穩態、孤網擾動下的運行特性。
2 仿真結果和控制策略分析
2.1 控制策略
無論并網或者孤網,光伏逆變器和直驅風機始終工作于 PQ控制模式;并網運行時,蓄電池系統也運行于PQ模式。PQ模式是微電網中新能源的一種重要的運行方式。PQ控制時變流器的控制采用基于電網電壓定向的電流閉環矢量控制,控制系統由功率外環和電流內環組成。控制邏輯系統圖如圖 5所示。
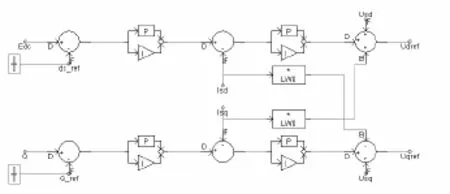
圖5 控制系統仿真模型
其中,Edc為逆變器直流側電壓實測值,Q為逆變器輸出無功功率實測值;dc-ref為逆變器直流側電壓參考值;Q_ref為逆變器輸出無功功率參考值;Isd、Isq為逆變器輸出電流的直軸分量和交軸分量;Usd、Usq為逆變器輸出電壓的直軸分量和交軸分量;Udref、Uqref為逆變器SPWM控制所需要的電壓矢量計算值。
根據仿真圖,解耦后的Id電流內環控制結構如圖6所示。當開關頻率足夠高時,其逆變橋的放大特性可由比例增益Kpwm近似表示。

圖6 電流內環控制結構
在并網條件下,光伏逆變器和直驅風機工作在最大功率跟蹤狀態,蓄電池工作在PQ控制,并網時大電網保證微電網電壓和頻率的穩定,系統控制器實時跟蹤PCC結點的有功和無功,控制光伏逆變器和直驅風機的無功輸出,提高PCC結點的功率因數。
2.2 模式轉換仿真
并網轉孤網,圖7所示是強制跳閘下PCC點開關兩側的波形(光伏和風力發電總容量大于負荷),其中圖中①為PCC點電網側電壓,②為PCC點微網側電壓。在PCC開關跳開后,控制器檢測到了孤網狀態,蓄電池切換到V/f控制模式,開始支撐微網恢復正常運行。在圖6所示逆變器的控制框圖中,在強制切換的過程中,逆變器外環給內環指定的 Id和 Iq基本不變(外環是較慢的功率控制),內環電流控制迅速調節,保持輸出的 Id和 Iq不變,整個逆變器呈現出電流源特性,原本反送大電網的電流流向負荷,造成電壓升高,出現過電壓。并網轉孤網可以在系統控制器干預下實現主動解列,控制器控制電源的PQ輸出,先將流經PCC開關的電流降為很低,再分開PCC開關,實現平穩過渡。如果切換過程中光伏和風力發電總容量小于負荷,就會出現短時欠電壓。
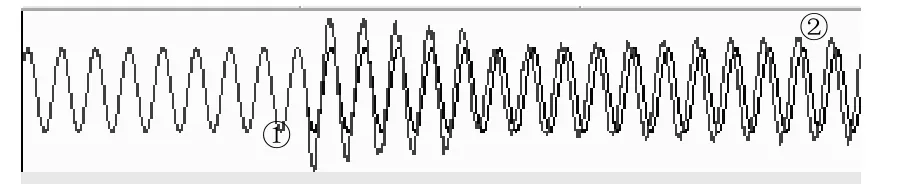
圖7 強制并網轉孤網仿真波形
孤網轉并網,圖8所示是在系統控制器的控制下PCC開關實現同期并網。控制器跟蹤主網電壓和微網電壓,調整系統頻率(49.95Hz),檢同期元件投入,當電壓和相角差都小于門檻時系統控制器發出合閘令,微電網并網運行。

圖8 同期并網仿真波形
2.3 負載特性仿真
在孤網以蓄電池為支撐的環境下,光伏逆變器和直驅風機采用PQ控制模式,蓄電池采用V/ f控制模式。負荷突然增加時,短時由蓄電池提供擾動功率。
圖9所示是負荷突然減少時的仿真波形。其中Qpv1,Qwt1,Qpcs分別為光伏、直驅風機以及蓄電池輸出的無功功率:Ppv1,Pwt1,Ppcs分別為光伏、直驅風機以及蓄電池輸出的有功功率:Ipv1,Iwt1,Ipcs分別為光伏、直驅風機以及蓄電池輸出的電流:EbusA,EbusB分別為母線A和母線B的電壓。
在切負荷的瞬間,逆變器電流不能突變,負載阻抗增加,電壓升高,過電壓及其延續的時間和負載切除的比例相關。短時過電壓系統需通過配置壓敏電阻或 MOV吸收電流,若能量過大,則可以通過控制器投入電阻箱吸收。
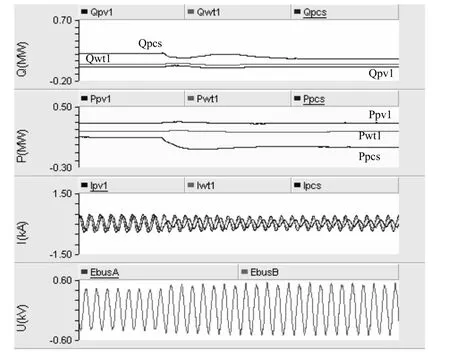
圖9 孤網運行切負荷仿真波形
3 微電網系統控制器的裝置實現
微電網的系統控制器實現微電網從并網轉孤網、以及孤網轉并網的過程,負責微電網獨立運行時電壓和頻率的上層控制,通過控制各類分布式電源和儲能設備的功率調節、負荷投切,來實現微電網系統穩定平衡。
在微電網獨立運行時,如負載小于風機和光伏的額定輸出功率,會能出現微電網頻率或者電壓過高,此時適當退出部分分布式電源或者在利用分布式電源并網逆變器的輸出功率限制功能,限制分布式電源的輸出功率。當負載大于風機、光伏、儲能設備的輸出功率時,微電網頻率或者電壓下降,此時適當切除部分負載,保持微電網系統頻率和電壓穩定。
系統控制器實時監視PCC電壓、電流,當需要孤網運行或者判斷出外部電網失壓,模式控制器快速切除與主網的連接,蓄電池雙向逆變器的工作模式由PQ模式轉換為V-F模式,迅速建立孤島運行時微電網系統的電壓和頻率。當需要孤網運行轉換為并網運行時,控制器跟蹤主網電壓和微電網電壓,實現同期投入。
基于微電網系統仿真的基礎上,本文設計構建了一套完整的微電網控制系統平臺,圖10是微電網的系統控制器系統示意圖。系統控制器采用基于PPC8321的嵌入式平臺實現系統采集控制功能。通過以太網或 485網絡與智能終端和逆變器實時通訊,掌握系統工況,并決策控制。系統簡單可靠,與微電網保護裝置互相配合,共同保證微電網的穩定可靠運行。
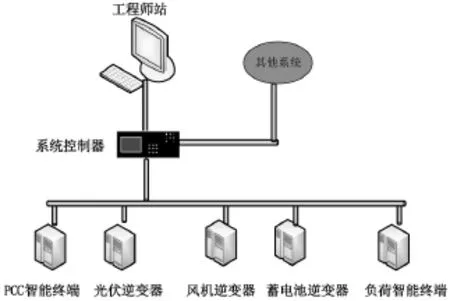
圖10 微電網的系統控制系統示意圖
4 結論
本文從微電網典型系統著手,利用 PSCAD建立了含風力、光伏、蓄電池系統的微電網模型,仿真分析各種擾動情況下微電網的響應及系統控制器的應對控制策略,并根據系統控制策略設計了微電網的系統控制器。微電網應對各種工況和擾動,除了風力、光伏等電源要具有較大的調節能力,配置蓄電池、超級電容器等儲能元件進行支撐外,還需要從系統角度實現微電源和負載的通信和協調控制,確保微電網系統安全穩定運行。
[1]MAJUMDER R, GHOSH A, LEDWICH G, ZARE F.Power management and power flow control with back-to-back converters in a utility connected microgrid[J]. IEEE Trans. on Power System,2010,25(2):821-834.
[2]JAAKKO L H. Protection principles for future microgrids[J]. IEEE Trans. on Power Electronics,2010,25(12): 2910-2918.
[3]SORTOMME E, VENKATA S S, JOYDEEP M.Microgrid protection using communication-assisted digital relays[J]. IEEE Trans. on Power Delivery,2010,25(4):2789-2796.
[4]LASSETER R H, ETO J H, SCHENKMAN B,STEVENS J, KLAPP D, LINTON E, HURTADO H,ROY J. Certs microgrid laboratory test bed[J]. IEEE Trans. on Power Delivery,2011,26(11):325-332.
[5]楊占剛,王成山.可實現運行模式靈活切換的小型微網實驗系統[J].電力自動化系統,2009(14):79-82.
[6]陳興峰,曹志峰,許洪華等.光伏發電的最大功率跟蹤算法研究[J].可再生能源,2005(1):8-11.
[7]CERALOL M. New dynamical models of lead-acid batteries[J]. IEEE Transacyions on Power Systems,2000,15(4):1184-1190.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19