船載測量雷達定位方法研究
2012-06-08 08:40:24周立鋒
雷達與對抗 2012年4期
關鍵詞:測量
周立鋒
(92941 部隊,遼寧 葫蘆島 125001)
0 引言
雷達是用來發現和跟蹤目標并對其進行定位的電磁系統。作為自主定位的測控裝備,雷達有其自身優勢,相比GPS 抗電磁干擾能力強。與光學測量設備不一樣,雷達在黑暗、霧霾和雨雪中都能對目標進行定位,可進行24 h 全天候測量。雷達數據錄取的頻率高、測量的諸元多,能夠自成系統進行數據處理,并便于實現測量和數據處理的自動化,可縮短試驗的周期。
隨著測量任務需要的發展,比如衛星發射,測控任務越來越重,傳統的固定站點雷達布站方案已不能滿足測量的需要。船載測量雷達由于其布站靈活性,可以布設在海洋中,具有比較大的優勢。船載測量雷達作為活動站,其數據處理方法與固定站點測量雷達的處理方法不盡一致。
1 坐標系定義
在船載雷達測量坐標系下,目標的測量參數為斜距R、方位角A和俯仰角E。為方便分析目標航跡,需將測量坐標系的測量值轉換到WGS-84 坐標系。在航跡參數解算中,需要用到以下幾個坐標系。
1.1 測量坐標系
船載雷達的原始測量數據是基于測量坐標系下的,其原點Oc在雷達方位軸與俯仰軸的交點,OXc軸在大盤平面內指向方位軸輸出為零的方向,OYc軸鉛垂向上,OZc軸與OXc軸構成右手直角坐標系[1],如圖1所示。
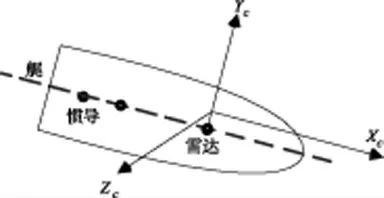
圖1 測量坐標系
1.2 甲板坐標系
甲板坐標系原點Oj為慣性導航平臺三軸交點,OXj軸在甲板平面內指向船艏,OYj軸垂直甲板向上,OZj與軸與OXj軸、OYj構成右手直角坐標系,如圖2所示。

圖2 甲板坐標系
1.3 地平坐標系
地平坐標系原點Og為慣性導航平臺三軸交點,OXg軸在當地水平面內指向真北,OYg軸鉛垂向上,OZg軸與OXg軸、OYg構成右手直角坐標系[2],如圖3所示。
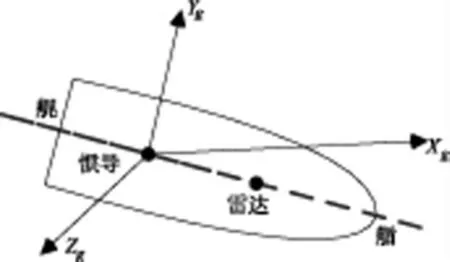
圖3 地平坐標系
1.4 WGS-84 坐標系
目前,在航跡參數解算時,坐標系一般采用WGS-84 坐標系。WGS-84 坐標系原點O為地球質心,OX 軸為過原點指向國際時間局BI1984.0時元定義的零子午面和國際時間局BI1984.0時元定義的協議地球赤道的交點;OY 軸為過原點指向國際時間局BI1984.0時元定義的協議地球東向,并垂直于OX 軸;OZ 軸為過原點平行于國際時間局BI1984.0時元定義的協議地球極軸(CTP)方向[3-4],如圖4所示。
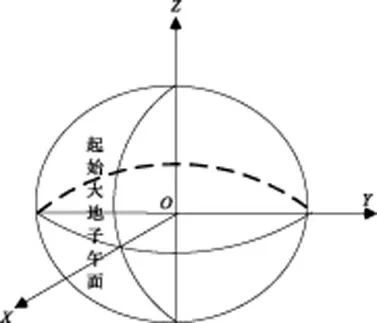
圖4 WGS-84 坐標系
2 定位算法分析
船載雷達測量得到的是測量坐標系下的球面坐標,在參數解算時,要進行數據預處理、誤差修正和方位角跨零等處理,并進行船位修正、船體變形修正和船姿修正。
下面主要分析船載雷達測量坐標系到WGS-84 坐標系的坐標變換過程,船載測量坐標系到WGS-84發射坐標系轉換流程,如圖5所示。

圖5 坐標系轉換流程圖
2.1 測量坐標系到甲板坐標系的轉換
由于雷達測量的測量值是測量坐標系下的斜距R、方位角A和俯仰角E,所以首先得把球面坐標轉換到直角坐標,其轉換公式如下:

測量直角坐標系到甲板坐標系:
式中B為變形的等效歐拉角矩陣,其形式如式(4),用測量坐標系相對甲板系的3個變形角代替3個船搖角。Xj0、Yj0、Zj0為測量坐標系原點在甲板坐標系的坐標。
2.2 甲板坐標系到地平坐標系的轉換
甲板坐標系到地平坐標系的轉換公式如下:
其中


式中Kc、Ψc、為輸出的航向角、縱搖角和橫搖角測量值。
航向角Kc為甲板坐標系OXj軸與地平坐標系OXg在XOZ 平面的夾角,即船艏艉線與真北的夾角,向右為正;縱搖角Ψc為甲板坐標系OXj軸與地平坐標系OXg在XOY 平面的夾角,向上為正;橫搖角為甲板坐標系OZj軸與地平坐標系OZg在YOZ 平面的夾角,右舷向下為正。
2.3 地平坐標系到WGS-84 坐標系的轉換
地平坐標系到WGS-84 坐標系的轉換公式如下:

其中

式中Lc、Bc為提供的船的經度和緯度;Xg0、Yg0、Zg0為地平坐標系原點在地心坐標系的坐標。
3 算例分析
下面分析的數據是某次任務雷達跟蹤飛機的數據。飛機上加裝了GPS 高精度測量系統,載波相位差分定位時其動態距離測量精度為0.2 m,GPS 數據轉換到雷達站點其測角精度為0.01 mrad。GPS定位采用的是WGS-84 坐標系,把GPS定位結果數據轉換到雷達測量坐標系,給雷達定位結果數據比對分析當真值。用文中算法得到的雷達定位結果與GPS 數據作一次差比對分析,其具體情況如圖6~8所示。圖中,橫軸為時間,單位s;縱軸為一次差,單位為m 或毫弧度。一次差的均值和標準差如表1所示。

圖6 斜距R 一次差

圖7 方位角A 一次差

圖8 俯仰角E 一次差

表1 一次差均值與標準差
4 結束語
通過算例數據分析,本文采用的雷達定位方法合理正確,精度高,能夠滿足測量需求,能在測量的相關領域推廣應用。但是,由于雷達測量體制的原因,要想得到更高精度的定位數據,在雷達的設計和制造過程中還需進一步提高裝備本身的精度。
[1]簡仕龍,費加兵,劉冰.航天測量船海上測控技術概論[M].國防工業出版社,2009:390.
[2]張守信.外彈道測量與衛星軌道測量基礎[M].北京:國防工業出版社,1992:62-63.
[3]朱華統,鄭育富.大地測量[M].北京:測繪出版社,1987:342-344.
[4]羅海銀.導彈航天測控通信技術詞典[M].北京:國防工業出版社,2001:448-449.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
