常規導航雷達實現中頻相參的技術方法研究
2012-06-08 08:40:28丁友峰
雷達與對抗 2012年4期
丁友峰,薛 霞,孫 斌,周 亮
(中國船舶重工集團公司第七二四研究所,南京 210003)
0 引言
導航雷達具有海面探測能力強、性能穩定、可靠性高、體積小巧、價格低廉等優點。以導航雷達為基礎研究平臺,對其回波信號進行采集和二次處理得到越來越廣泛的應用。近年來以導航雷達為基礎進行改裝研制的測波雷達已逐步成為一種海洋環境觀測的新手段。
隨著高速AD、高性能FPGA 芯片的發展以及雷達中頻相參處理技術的成熟應用,對常規非相參導航雷達進行改造,采集其中頻信號并通過先進的數字相參處理,實現中頻相參功能,獲得多普勒速度信息,可為目標檢測和海態測量等應用提供更豐富的數據信息。
本文以某型常規非相參X波段導航雷達為例,介紹了一種通過中頻信號采集、相參信號聯合相干處理等實現中頻相參的技術設計方法。
1 設計方法
X波段導航雷達由天線、收發機(含發射機、接收機和馬達等)、信號處理器和終端等組成[1]。中頻相參信號處理所需的中頻信號由接收機直接提供,故可保留導航雷達天線和收發機,設計中頻采集處理電路和終端顯控軟件,進行發射機控制和中頻信號處理。
1.1 導航雷達接口信號分析
該型導航雷達收發機控制接口信號定義見表1、表2。
1.2 系統設計
根據雷達收發機接口信號(見表1),設計中放及信號處理電路,對導航雷達中頻回波進行采樣、信號處理,生成回波I、Q 數據,通過千兆以太網傳輸給計算機(工控機或筆記本)。計算機進行發射控制、信號處理和回波顯示。導航雷達中頻相參處理設計框圖見圖1。
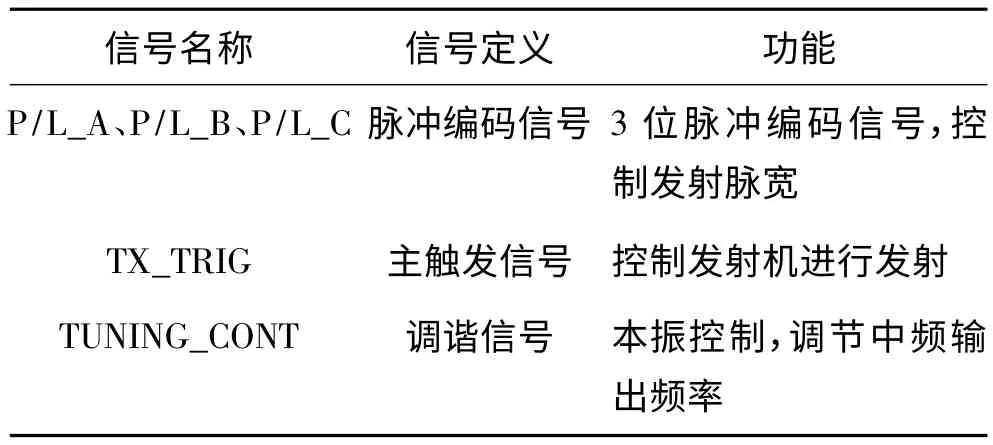
表1 導航雷達收發機控制信號定義
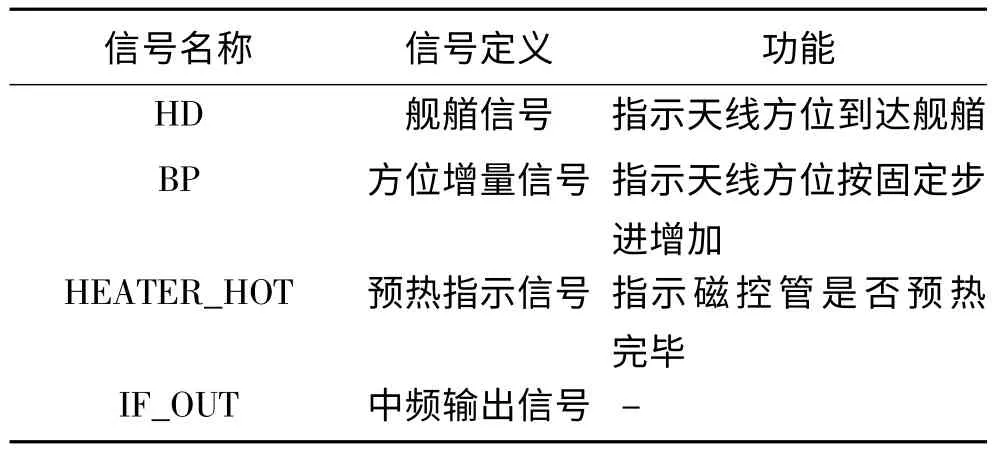
表2 導航雷達收發機輸出信號定義
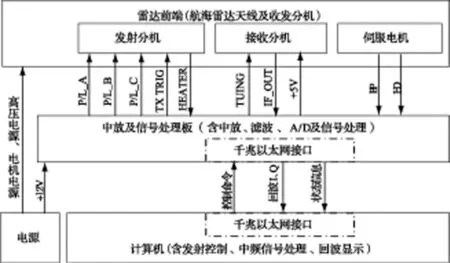
圖1 X波段導航雷達中頻相參處理設計框圖
1.3 硬件設計
根據表1,雷達收發機接口信號特性對實現數字中頻相參處理功能的中頻接收和信號處理電路進行適應性設計,電路設計框圖如圖2所示。
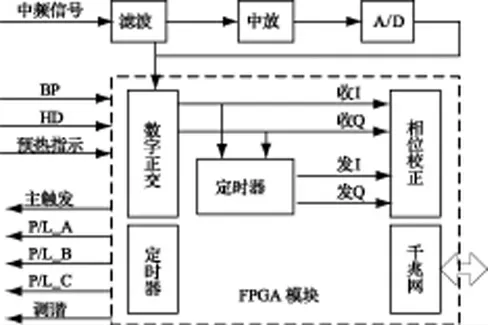
圖2 中頻接收和信號處理電路設計框圖
將雷達低噪聲接收模塊提供的60 MHz中頻信號經LC 帶通濾波器B60-30P1B 進行濾波后采用增益可控芯片AD8369(增益由FPGA 編程控制)進行放大;使用14 位A/D 轉換器AD6645 進行中頻模數轉換,采樣頻率80 MHz;FPGA 模塊采用Virtex-4 以上系列,集成了RAM、加載芯片、千兆網絡口等。
值得注意的是,為保證雷達發射頻率的穩定度,發射機的調諧控制信號須具有較高的精度和穩定度。
1.4 軟件設計
數字化中頻信號經數字正交、相位校正、FIR 濾波抽取、抗同頻干擾、PPP處理、數字測頻和DDS 補償等一系列處理后,可實現中頻相參功能[2]。軟件主要分為兩部分:VHDL中頻處理軟件和VC終端顯控處理軟件。
1.4.1 VHDL中頻處理軟件設計
FPGA 是實現中頻相參處理的核心硬件處理器,采用VHDL 硬件描述語言對其進行設計開發,實現數字正交相干檢波和相位校正,完成零中頻IQ兩路數據的生成,并通過千兆網接口實現數據外發。
(1)數字正交相干檢波
A/D 采樣后的信號和數字本振信號相乘后,完成頻譜搬移到零中頻的過程,最后再經過一個低通濾波器,即可得到零中頻的I、Q信號,從而完成了數字正交相干檢波過程。
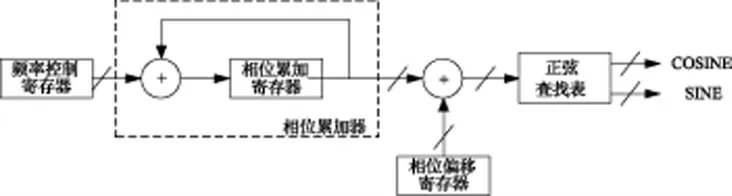
圖3 DDS 原理框圖

圖4 相位校正原理框圖
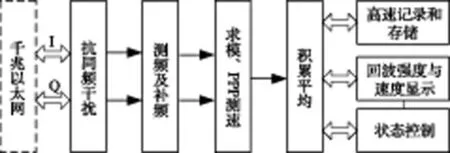
圖5 終端顯控處理軟件的結構示意圖
數字本振信號采用DDS方式實現,DDS的原理框圖如圖3所示,采用了相位幅度相關合成信號方法。
(2)數字相位校正
因雷達采用的是磁控管自主振蕩式發射機,其每一個發射脈沖的高頻起始相位是隨機的,無法采用相參處理技術對雷達回波進行信號處理。為了能夠進行相參處理,通過耦合一部分發射回波來對接收回來的回波進行相位校正,從而實現中頻相參。
對回波視頻輸出信號進行與發射相關的相位旋轉后,來自磁控管振蕩器的隨機初相、本振信號源的抖動相位、基準信號源的抖動相位均完全得到消除,數學合成并用于多普勒處理的正交I、Q兩路信號僅保留反映目標運動特性的相位信息。令I(發)、Q(發)為發射耦合視頻的出信號,I(收)、Q(收)為回波視頻輸出信號,則相位校正原理框圖如圖4所示。
(3)千兆網數據傳輸
借助于FPGA 內嵌的MAC和GMII 接口及千兆網物理層芯片PHY,對VHDL 代碼進行封裝,在EN信號的控制下將上述信號處理生成的IQ 數據依次送入FIFO 即可完成網絡IQ 數據傳輸。
1.4.2 VC終端顯控處理軟件
X波段海態雷達的終端設備可使用工控計算機或筆記本電腦,使用VC 軟件實現回波強度解析、數字測頻、PPP測速、抗同頻、回波顯示等一系列處理。終端顯控處理軟件的結構示意圖見圖5。
(1)數字測頻
由于發射機采用磁控管,而隨著時間、溫度、供電等環境條件的變化,發射機磁控管發射頻率可能會漂移,范圍可達幾兆赫茲。磁控管的頻率漂移對后續的與回波相位信息有關的信號處理精度有很大影響,因此必須對磁控管的頻率漂移進行補償。
采用數字鑒頻方法,測出磁控管的頻率漂移,同時對數字正交框中的數字本振信號頻率f0進行控制以補償磁控管的漂移頻率。
數字測頻是在雷達發射期間對60 MHz中頻進行的。通過A/D 采集和數字正交算法運算,得到I和Q信號,計算出相位atan(I/Q),則相位的變化正比于頻率。對多次發射期間的波形進行采集和計算,并將結果進行平均,則可以實現更高的測頻精度。
(2)PPP測速處理
為提高系統的實時性,并提高系統測速精度,采用脈沖對處理器進行多普勒信息的測量。PPP方法與FFT方法的主要區別就是不需要進行頻譜分析。PPP方法的優點是運算設備量較小,靈敏度高。
脈沖對處理的基本原理是基于運動目標的平均徑向速度可以用相鄰兩個回波信號的相位差的平均值來求得,即

式中,T為雷達重復周期,N為相關平均次數,?i和γ?i+1分別為相鄰兩個回波信號的相位,λ為雷達波長。
設Gi和Gi+1為相鄰兩個周期的回波信號:
經過公式推導,可以獲得相鄰兩個回波信號的相位差:
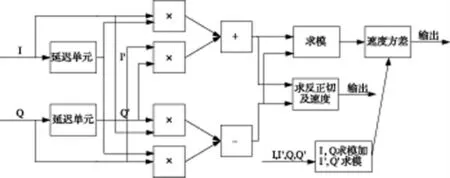
圖6 PPP處理框圖

Gi+1*Gi即是間隔為T的相關函數R(T)。因此,可以得到平均徑向速度為
PPP測速處理方法見圖6。
(3)回波顯示
雷達探測到的中頻回波通過上述中頻相干信號處理后,使用DirectDraw技術設計回波的實時P 顯。為了顯示直觀,回波的速度顯示部分可設置速度-顏色映射,完成PPP測速后,不同速度的目標回波信號以不同的顏色進行顯示。
2 設備組成
X波段導航雷達中頻相參處理設備組成圖見圖7。
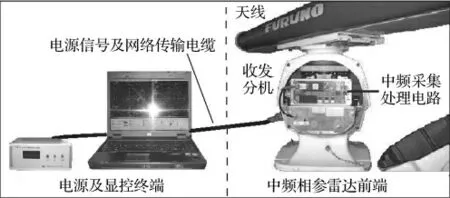
圖7 X波段導航雷達中頻相參處理組成結構圖
3 結束語
本文討論了一種通過對傳統非相參導航雷達進行改造,采集中頻回波信號,進行一系列相參信號處理,實現相參功能的軟、硬件總體設計方法。該方法除了可提供多普勒速度等更豐富的數據信息外,雷達結構得到簡化,設備量大幅降低,具有良好的應用前景。
[1]張潤澤.船舶導航雷達[M].北京:人民交通出版社,1990.2.
[2]丁玉美,高全西.數字信號處理[M].西安:西安電子科技大學出版社,2001.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
