飛行控制系統可視化仿真平臺設計
2012-06-07 01:35:00陳力威
電光與控制 2012年1期
關鍵詞:規劃
陳力威, 朱 凡, 劉 希, 楊 楠
(空軍工程大學工程學院,西安 710038)
0 引言
現代飛機,尤其是戰斗機,為了完成預定的任務和改善飛機的飛行品質,都在飛機上安裝各種類型的飛行控制系統。飛機的動力學特性因為其所安裝的飛控系統可能會發生徹底的改變,因此在飛行仿真時必須要考慮到飛控系統的動力學特性[1]。同時,提高仿真系統的通用性、執行效率、仿真建模易行性和系統可擴展性也具有重要意義。本文按照并行計算模型的思想[2]設計了仿真平臺框架。首先從總體上設計了飛控系統的并行仿真結構,然后再將飛控系統分成發動機推力、升降舵、副翼和方向舵4個并行通道。這樣可以充分利用多核處理器的優勢,大大提高了仿真效率,經檢驗,仿真解算速度可以達到實時仿真的要求。最后利用視景仿真軟件VegaPrime實現戰場環境三維顯示,并將其應用于飛機在預定航路飛行的實時顯示過程中。
1 系統框架設計
依據提高運行效率和易于維護、擴展的原則,設計平臺系統的總體框架結構如圖1所示。
該平臺主要包括飛行動力學仿真類、視景仿真類和Matlab后臺服務3個部分。由圖可見,應用多核編程技術,可以并行同步執行整個系統的仿真解算。本文通過OpenMP并行編程方法實現了飛行動力學系統和飛控系統的并行解算。
對于任何飛機來說,六自由度飛行動力學方程及飛行方位角、氣動角、過載等飛行狀態信息的解算都是相同的,為公共屬性部分。而飛機氣動力和力矩的解算、物理參數因機型而異,為私有屬性部分。因此在共有屬性和私有屬性之間建立標準化接口,易于擴展各種機型模型。如圖1所示,灰色標識的模塊為公共屬性部分,白色標識的模塊為私有屬性部分。
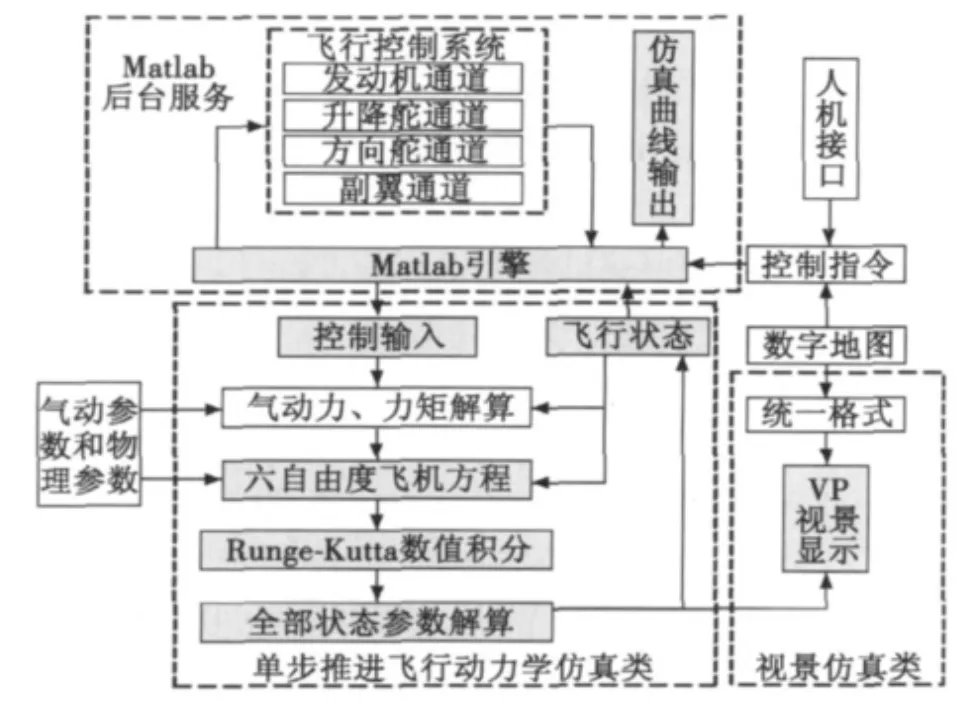
圖1 仿真平臺總體框架Fig.1 Framework of simulation platform
本文借鑒RTW實時仿真的單步推進機理建立飛行動力學通用仿真類框架。該類不包含發動機模型,只接收發動機推力和力矩。我們將發動機模型納入飛行控制系統,這也是基于綜合飛行控制系統的考慮。本文將氣動參數的解算部分設計成該類的成員函數,解算得到氣動力和力矩。因此只需要一個類就實現了飛行動力學系統模型的構建,這樣就便于采用內存共享的方式實現模塊間的通信。從而克服了傳統通用飛行動力學類庫模塊因劃分過細而導致接口復雜的問題,提高了仿真效率。用戶只要按照接口標準,添加具體機型的氣動力、力矩解算的成員函數,就可以很方便地擴展并實現各種機型的動力學解算。
飛行控制部分一般是復雜的高階系統,且沒有統一的格式。為了方便用戶搭建或加載各種控制器,本文將飛行控制系統在Simulink中實現,利用其良好的可視化建模環境,方便了各種控制器的搭建或導入。借助Matlab并行計算工具箱的SPMD多線程并行計算方法在4個Matlab工作間并行解算飛控系統的發動機推力、升降舵、副翼和方向舵4個通道。
本文將OpenGL直接引入VegaPrime中,通過添加不同格式數字地圖的讀取成員函數,將數字地圖轉變成內部標準的地圖格式存儲,再在此基礎上執行各種操作,最后將真實場景在屏幕上顯示。
2 仿真平臺軟件開發的關鍵技術
飛行控制系統可視化仿真平臺的軟件部分主要包括:飛控系統仿真設計、靜態航跡規劃、動態航跡規劃、OpenMP工作分區編碼和SPMD多工作間并行解算方法等部分。靜態航跡規劃是指在預先已知突防地區地形地貌的基礎上規劃好的突防航跡,而動態航跡規劃是指在突防過程中突然出現一個威脅目標(如高炮、雷達車等),實時地調整突防航跡。另外還包括了飛機的動力學模型、控制臺軟件、視景軟件和操縱系統軟件等,這些是構成仿真平臺的基礎軟件模塊,但不是本文的研究重點,將不再贅述。
2.1 飛控系統仿真設計
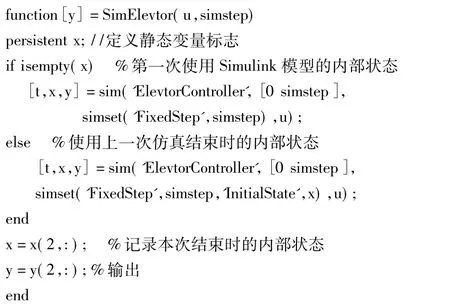
本文動力學仿真模型是單步推進的,完全可以用定時器驅動進行實時仿真。然而Simulink模型無法通過命令行來實現單步仿真。盡管通過Simulink命令行可以執行指定時間段的仿真,但仿真實際上還是從零時刻開始的,只是僅輸出指定時間段的仿真結果。如果僅通過指定仿真時間段來仿真,每推進一步都要從頭開始,這顯然無法滿足實時仿真的需要。由于Simulink命令行仿真能返回系統的內部狀態,所以本文通過記錄控制系統每次仿真結束時的內部狀態作為下一次仿真的初始狀態,將每次仿真的起始時刻都設為零,結束時刻和仿真步長都設為單步仿真推進步長,從而實現了Simulink仿真模型的單步推進。這樣就完全可以使用定時器驅動控制器單步仿真,從而實現了整個系統的同步并行閉環仿真。以升降舵通道為例,單步推進Simulink仿真模型的偽代碼如下:
2.2 基于改進A*算法的靜態航跡規劃
近年來,研究用于航跡規劃的人工智能方法較多,其中包括無信息和有信息搜索算法、遺傳算法[3]、粒子群算法[4]、神經網絡算法[5]等。但后幾種方法的計算原理一般復雜且計算量比較大,目前僅限于理論的研究。目前,研究人員對A*算法進行了很多改進。文獻[6]采用一種稱為稀疏A*搜索(SAS)的技術進行航跡規劃,該算法結合路徑約束有效地削減了搜索空間;文獻[7]的LPA*(Lifelong Planning A*)是一種遞增式搜索的A*算法;文獻[8]提出了一種結合飛行器簡化運動方程的A*算法。這些方法均在一定程度上提高了搜索效率。但通過改進算法流程和優化算法的數據結構,挖掘算法潛力,來用于工程實現的研究卻并不多見。
2.2.1 改進 A*算法
設計了新的數據結構來管理OPEN表和CLOSED表,大大提高了A*系列算法的搜索效率。將A*算法中的OPEN表映射到CLOSED表中,設計了嵌套二叉樹來管理CLOSED表,一方面提高了重復節點的查找效率,另一方面解決了A*系列算法并行搜索時維護CLOSED時存在的數據訪問沖突問題,使得算法更加適用于并行多核編程。提出最小二叉樹的方式管理OPEN表,克服了采用傳統鏈表排序耗時,二叉堆數組容量有上界的缺點。
二叉樹是一種很好的排序和索引應用模式。因為在建立二叉樹的同時數據已經過初步的比較判斷并依照二叉樹的建立規則存放。規則如下:
1)第一個輸入的數據作為此二叉樹的樹根;
2)其后的數據以回溯的方式與樹根進行比較,小于樹根的放置于左子樹,大于樹根的放置于右子樹。
從上面的規則可以知道,左子樹內的值一定小于樹根,右子樹內的值一定大于樹根。因此在索引的時候只要從樹根往下依次比較,比樹根值小往左子樹查找,反之則往右子樹查找。這樣的索引方式比順序遍歷查找的效率要高很多。
2.2.2 嵌套二叉樹的CLOSED表
因為航路節點可以用(x,y,φ)來唯一標識,所以建立如圖2所示的三層嵌套二叉樹。頂層樹以φ的大小為依據建立,記為φ_Tree。φ_Tree的每個單元內嵌一個以x大小為依據建立的子樹x_Tree。x_Tree每個單元再內嵌一個以y大小為依據建立的子樹y_Tree。

圖2 CLOSED表結構圖Fig.2 The structure graphics of CLOSED table
這樣在查找某待擴展節點是否是重復節點的時候,首先根據節點φ值索引φ_Tree,如果φ_Tree中存在對應φ的單元,再依據節點的x值,索引該單元內嵌的x_Tree,同理,再索引y_Tree直到找到節點或無法找到返回。這樣,通過有序的嵌套二叉樹管理,大大提高了索引效率。
在并行計算中,3個方向同時擴展時,擴展節點的當前航向φ顯然是不同的。因此,只要在初始化時建立所有方向的φ_Tree,并將其內嵌的x_Tree置空,這樣在同時壓入3個方向的新的節點時,不會存在數據競爭和訪問沖突。這樣就可以免去并行計算的互斥鎖機制,充分發揮并行計算的效能。
2.2.3 最小二叉樹的OPEN表
OPEN表可以采用以節點當前代價值g的大小為依據建立二叉樹,并在二叉樹內設置一個指向最左子樹的指針Pleftest。由二叉樹的基本思想,最左子樹節點的代價值最小,即為最優待擴展節點。因此在每一次壓入新的節點和彈出最左子樹的節點作為最優待擴展節點時,只要維護Pleftest,保證其始終指向最左子樹,即指向具有最小代價值g的節點,在索引最佳擴展節點的時候,通過Pleftest就可以直接索引到最佳待擴展節點。以這種方式維護OPEN表,解決了傳統的數組最小二叉堆方式維護OPEN表容量有界和單向鏈表索引效率低下的缺點。雖然這樣仍然沒有解決并行計算訪問OPEN表數據時的沖突和競爭問題,但是經過實際檢驗,并行計算時同時操縱OPEN表的機會很少,采用互鎖機制解決訪問沖突的問題,基本不會影響搜索速度。
2.2.4 仿真算例
實驗使用10800×14400的真實數字地圖和模擬生成的威脅數據。本文在配置處理器為英特爾酷睿4核處理器 Q6600、主頻2.4 GHz、內存2 G的 Windows操作系統的計算機上進行仿真。規劃算法在Visual Studio 2008編程環境下采用OpenMP多線程編程技術實現。在如表1所示仿真參數下,威脅信息如圖,分別用普通稀疏A*算法和本文提出的改進算法進行規劃仿真搜索,不考慮后續航路優化和刪減,得到了如圖3所示的規劃結果,其耗時對比見表2。
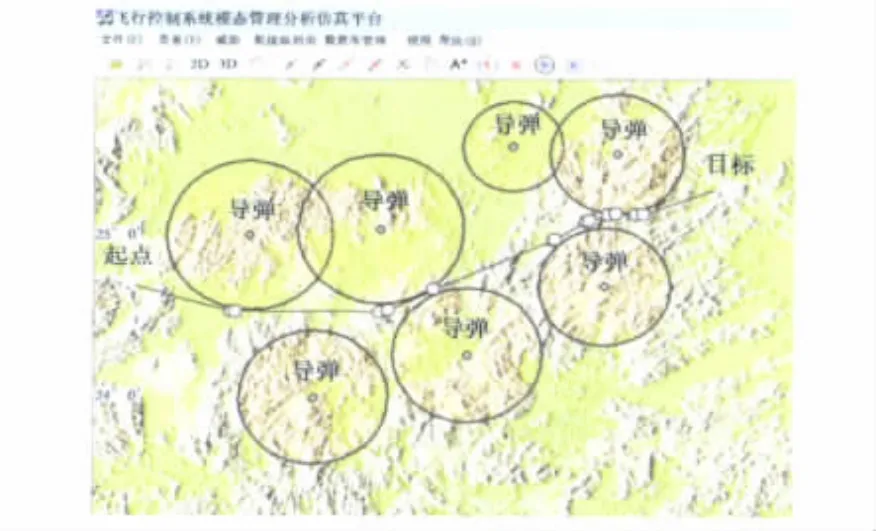
圖3 靜態航跡規劃Fig.3 Static flight path planning
由仿真結果可知,改進A*算法的流程和數據結構后搜索效率提高了8~10倍。并行搜索時相對搜索效率更高。

表1 仿真參數Table 1 Simulation parameter
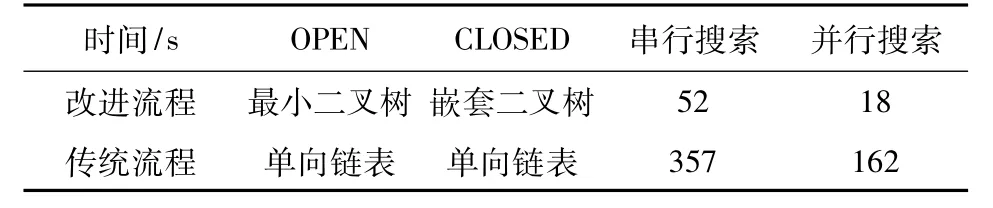
表2 搜索耗時對比Table 2 The comparison of searching time
2.3 基于電荷法的動態航跡規劃
動態航跡優化就是飛機在任務執行階段,以參考飛行航線為基準,根據實時威脅,動態計算飛行航跡,修正參考航線,實現威脅的有效回避[9]。本文使用電荷法來處理突發威脅:飛行器探測到新的威脅信息后,如果發現還沒有進入該威脅工作區間,則及早地改變參考航線;如果發現已經進入該威脅范圍之中,規劃的航跡要能夠使飛行器最快撤離危險區。采用電荷法處理突發威脅的思想來源于庫侖定律,即同性電荷之間相互排斥。結合飛行器的飛行性能約束條件,確定下一航路點的位置,從而滿足飛行過程中的安全要求。利用電荷法處理突發情況有以下兩種典型情況:
1)飛行器探測到威脅時尚未進入該威脅的工作區間,并且有足夠的時間和距離使得飛行器能夠平穩地回避威脅,由于飛行器距離威脅區還有一定的距離,進行實時航跡規劃以改變參考航線,回避該威脅;
2)飛行器探測到威脅時已經進入該威脅的工作區間,或者由于時間短或距離近使得飛行器無法及時調整飛離威脅。此時需要通過調節規劃控制量來限定軌跡樹的生成方向:根據父節點來選定相應的控制量,使生成的下一節點盡量遠離威脅區域[10];并對生成的新節點,判斷其位置是否已經遠離威脅區域;一旦飛出威脅區域,則改用第一種處理方法生成新的節點,替換原有參考航跡節點。動態規劃航跡的三維圖形如圖4所示。
應該指出的是,在靜態和動態航跡規劃中,利用上述方法生成的只是水平參考航線。在應用中還需根據地形狀況和飛行器機動性能限制,利用地形跟隨技術中比較成熟的TF算法產生垂直航跡 。當然,為了飛行安全,還需在生成的垂直航跡基礎上加上安全間隙高度。
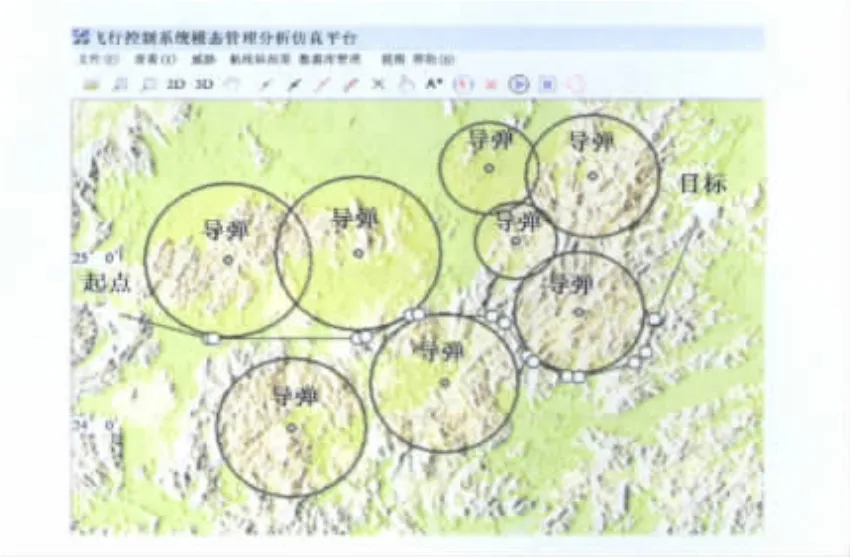
圖4 動態航跡規劃Fig.4 Dynamic flight path planning
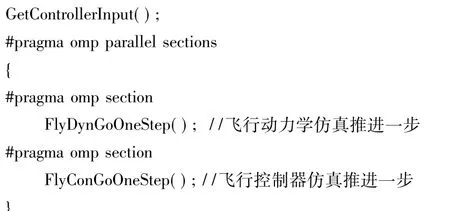
2.4 OpenMP工作分區編碼
OpenMP是一種面向共享內存以及分布式共享內存的多處理器多線程并行編程語言,由一些具有國際影響力的大規模軟件和硬件廠商共同定義的標準。由于Microsoft VisualStudio.Net2008已經支持OpenMP的編程,這給我們帶來了很大的方便。下面是本文工作分區的偽代碼實現。
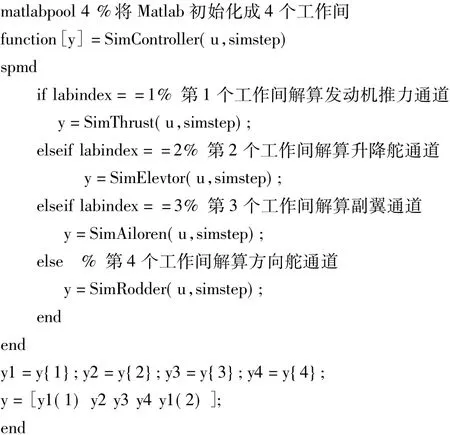
2.5 SPMD多工作間并行解算方法
Matlab并行計算工具箱提供了SPMD并行計算工具,它可以先將Matlab初始化成多個工作間,在不同的工作間執行不同的任務,然后將結果返回到主工作間中。具體到本文,我們將Matlab區分成4個工作間,分別解算飛控系統的發動機推力、升降舵、副翼和方向舵4個通道。其偽代碼為
3 軟件界面及視景仿真實現
該平臺可以在二維數字地圖上用鼠標指定飛行初始位置和航路,如圖5所示。
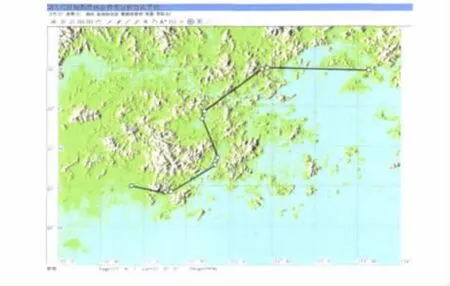
圖5 二維航路指定Fig.5 Two-dimensional path designation
實現導航仿真飛行。運行,開始仿真,點擊平臺主界面的三維動畫顯示按鈕可以看到飛機實時飛行狀態三維視景顯示,如圖6所示。

圖6 三維動畫顯示Fig.6 Three-dimensional animation display
該平臺Matlab后臺Simulink控制器模型可以按照接口標準,直接搭建或加載。由于控制器較為復雜,本文對各控制模態進行了封裝,其中縱向俯仰姿態保持控制模態界面,如圖7所示。
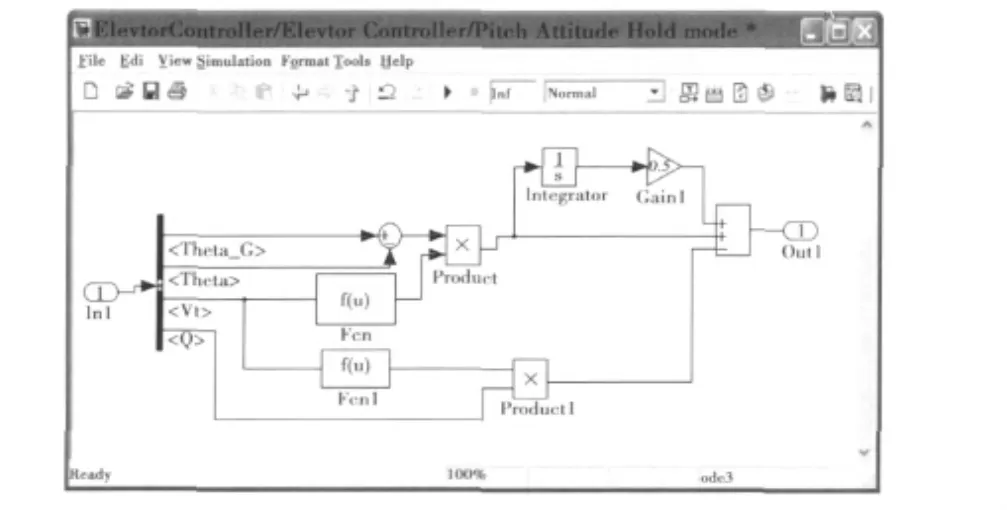
圖7 縱向俯仰姿態保持控制模態Fig.7 The remain pitch elevator of control mode
根據變量約定,可以在Matlab命令行窗口用畫圖命令方便畫出各種飛行仿真曲線圖。以等高飛行控制為例,如圖8所示為高度、速度、迎角和側滑角隨時間變化的曲線。
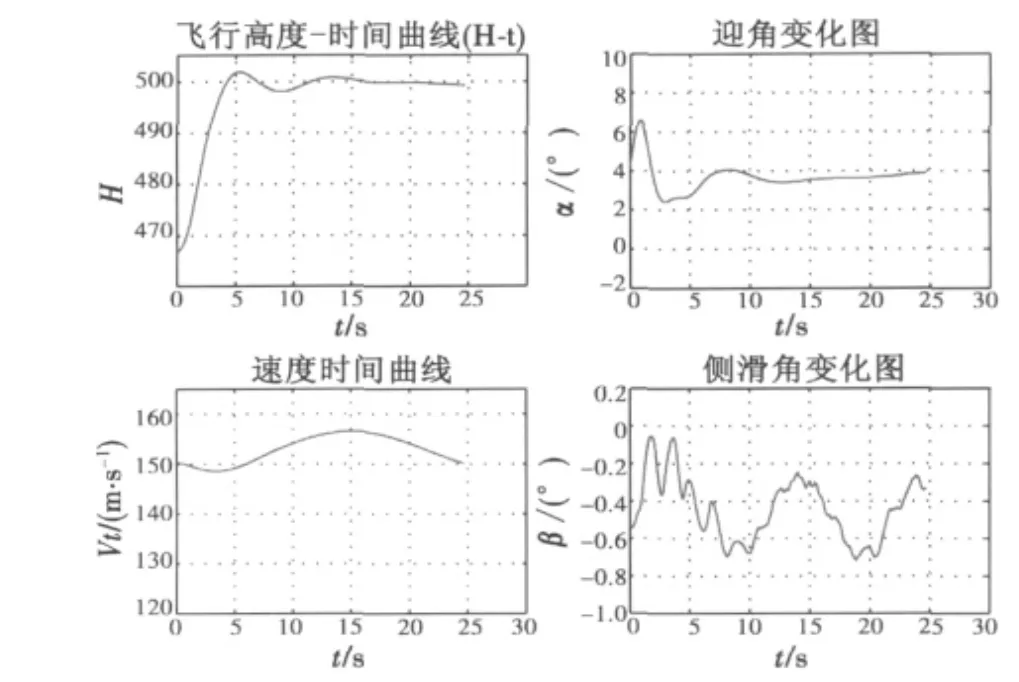
圖8 仿真結果曲線Fig.8 The simulation result
4 結論
本文根據多核編程的思想設計了飛行控制系統仿真平臺框架;借鑒RTW單步仿真推進的仿真機理,設計了通用飛行動力學解算類框架;通過Matlab引擎,實現了飛控系統Simulink環境可視化建模及其與C++編程實現的飛行動力學仿真的同步通信;該平臺通過三維視景仿真、數字和曲線的方式顯示仿真結果,便于科學研究和理論分析。使用者可以很方便地在該平臺上進行功能擴展和仿真分析。使用戶更加直觀地了解飛機在預定航路上的飛行情況,協助完成飛行方案的設計、驗證、論證、篩選和確定。本仿真平臺已經實現了“Beaver”多模態自動駕駛儀的實時仿真驗證。在以后的研究中,將進一步考慮加入各種干擾,以及數字地圖紋理渲染技術,增強戰場環境真實感。
[1]商重陽,劉艷.基于面向對象技術的飛行控制系統仿真框架[J].系統仿真學報,2006,18(2):472-474.
[2]許立軍,鮮勇,楊其,等.基于A*算法的多線程并行航跡規劃方法研究[J].電光與控制,2009,16(9):33-36.
[3]何珮,屈香菊.應用自適應遺傳算法進行參考航跡規劃[J].航空學報,2003,24(6):499-502.
[4]唐強,王建元,朱志強,等.基于粒子群優化的三維突防航跡規劃仿真研究[J].系統仿真學報,2004,16(9):2033-2036.
[5]YANG S X.System,Man,and Cybernetics[C]//IEEE Internatronal Conference,2002:515-520.
[6]SZCZERBA R J,GALKOWSKI P,GLICKTEIN I S,et al.Robust algorithm for real-time route planning[J].IEEE Transactions on Aerospace and Electronic System,2000,36(3):869-878.
[7]KOENIG S,LIKHCHEV M,FURCY D.Lifelong planning A*[J].Artificial Intelligence,2004,155(3):93-146.
[8]李季,孫秀霞.基于改進A-star算法的無人機航跡規劃算法研究[J].兵工學報,2008,29(7):788-792.
[9]歐杰,曹祺,劉超.低空突防可視化仿真平臺開發[J].計算機測量與控制,2010,18(7):1572-1575.
[10]ASSEO S J.Terrain following terrain avoidance path optimization using the method of steepest descent[C]//NAECON,1988(3):1128-1136.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41