一種基于位置誤差檢測門限的機(jī)動(dòng)目標(biāo)跟蹤算法*
2012-06-07 01:50:24湯傳貴晁愛民張國棟
艦船電子工程 2012年1期
湯傳貴 張 珂 晁愛民 張國棟
(1.海軍駐青島造船廠軍事代表室 青島 266001)(2.海軍工程大學(xué) 武漢 430033)
1 引言
在現(xiàn)代跟蹤系統(tǒng)中,對勻速目標(biāo)的跟蹤是很容易實(shí)現(xiàn)的,但對于機(jī)動(dòng)目標(biāo)的跟蹤就比較困難,原因在于很難建立精確的機(jī)動(dòng)目標(biāo)模型。研究人員做了大量的工作,提出了許多模型,其中周宏仁等人提出的機(jī)動(dòng)目標(biāo)“當(dāng)前”統(tǒng)計(jì)模型[1]是目前較好的一種。由于這些模型自身的局限,單獨(dú)采用一個(gè)模型進(jìn)行濾波精度不高。為此,Bar—Shalom和Blom等人在廣義偽貝葉斯算法的基礎(chǔ)上,提出了一種具有馬爾可夫切換系數(shù)的交互式多模型(IMM)濾波算法[2~3],其中多個(gè)模型并行工作。模型間以概率矩陣進(jìn)行轉(zhuǎn)移,目標(biāo)狀態(tài)估計(jì)是多個(gè)濾波器交互作用的結(jié)果,該算法不需要機(jī)動(dòng)檢測,達(dá)到了全面自適應(yīng)的目的。
但是在實(shí)際的MM算法運(yùn)行過程中,總模型集里僅僅只有一小部分模型對整體狀態(tài)的估計(jì)有較大作用。因此,在任何時(shí)刻都使用固定的模型集是不合適的,以上算法中的限制可以通過時(shí)變模型集的方法解決,這種方法被稱為變結(jié)構(gòu)多模型(VSMM)算法,由 Li X R[4]和 Kirubarajan[5]等人所提出。VSMM算法可以看作是普通的定結(jié)構(gòu)多模型算法(FSMM)加上一個(gè)利用當(dāng)前時(shí)刻狀態(tài)調(diào)整使用模型的控制模塊。在VSMM算法的設(shè)計(jì)中,不僅需要像FSMM算法一樣考慮所有可能模型集合,還需要考慮在某一時(shí)刻如何選擇使用有效的模型集合,從而達(dá)到降低算法運(yùn)算負(fù)荷的目的。
本文通過對位置誤差的檢測實(shí)現(xiàn)模型集合自適應(yīng),屬有向圖切換法。基于位置誤差檢測的VSMM算法與IMM算法的仿真實(shí)驗(yàn)比較結(jié)果說明了該算法的有效性。
2 基于RAMS的VSMM算法簡介
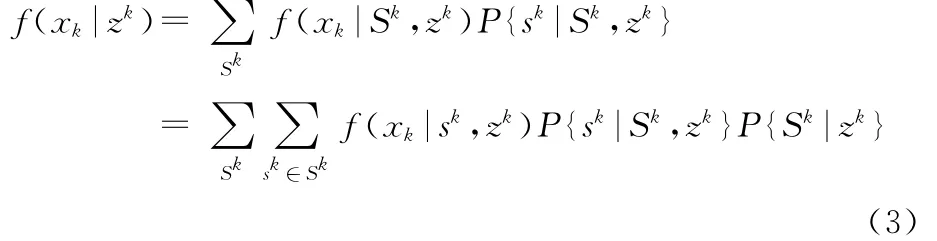
理想的VSMM算法應(yīng)該分成兩層結(jié)構(gòu),上一層為多模型集合序列,下一層為模型集合內(nèi)的多模型序列,整體狀態(tài)估計(jì)由下式給出[6]:


VSMM算法的兩級融合結(jié)構(gòu)如圖1所示。

圖1 VSMM算法兩級融合結(jié)構(gòu)示意圖
3 基于位置誤差檢測的VSMM算法
本文采用極坐標(biāo)系下的量測模型和直角坐標(biāo)系下的狀態(tài)模型進(jìn)行目標(biāo)跟蹤理論的研究。以我艦觀測雷達(dá)為原點(diǎn)建立空間直角坐標(biāo)系,則目標(biāo)在直角坐標(biāo)系內(nèi)的運(yùn)動(dòng)情況如圖2所示。
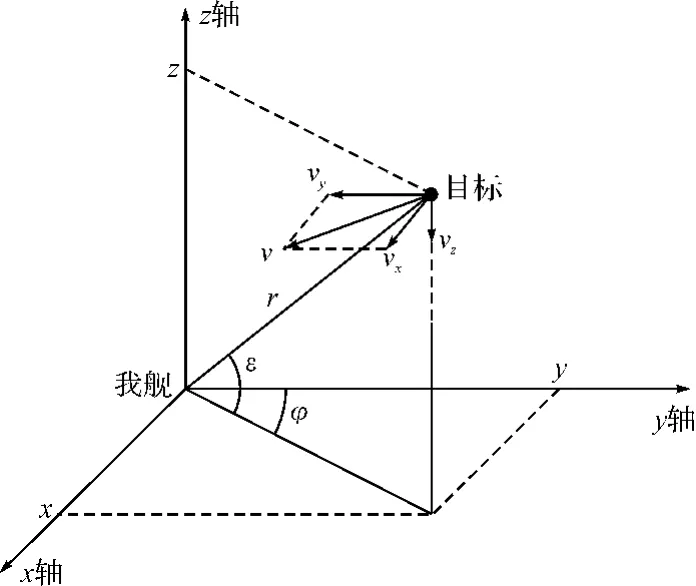
圖2 火控濾波直角坐標(biāo)系及目標(biāo)運(yùn)動(dòng)情況
參照圖2,假設(shè)目標(biāo)在水平面內(nèi)做勻速直線運(yùn)動(dòng),r、φ、ε是觀測雷達(dá)輸出的斜距、方位角、俯仰角信息,設(shè)斜距、方位角、俯仰角的隨機(jī)觀測誤差均方差分別為σr、σφ、σε,同時(shí)忽略系統(tǒng)誤差。
由此可見,二甲雙胍能有效地延緩AS的進(jìn)展,對T2DM患者心血管系統(tǒng)具有一定的保護(hù)作用。但由于受倫理道德原則、《藥物臨床試驗(yàn)質(zhì)量管理規(guī)范》(GCP)和相關(guān)法律法規(guī)的約束,目前該方面臨床研究還相對較少,其結(jié)論仍有待進(jìn)一步驗(yàn)證。
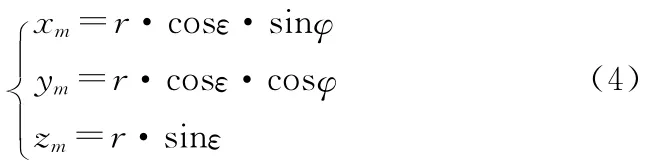
假設(shè)初始速度和位置為零,極坐標(biāo)系與直角坐標(biāo)系之間的關(guān)系如下:
3.1 模型集合設(shè)計(jì)
由于目標(biāo)作轉(zhuǎn)彎機(jī)動(dòng)時(shí)除了位置和速度信息的變化外,還存在著高低角和方位角信息的變化,并且測量信息在三維直角坐標(biāo)系下是相互耦合的,因此傳統(tǒng)VSMM算法對三維空間中目標(biāo)的轉(zhuǎn)彎機(jī)動(dòng)跟蹤效果較差,而對目標(biāo)的勻速、勻加速機(jī)動(dòng)跟蹤效果較好。基于以上原因,本文模型集的設(shè)定將主要針對目標(biāo)的轉(zhuǎn)彎機(jī)動(dòng)。設(shè)定以下6個(gè)模型集,模型集中包含各子模型:
模型集1:{勻速直線運(yùn)動(dòng)目標(biāo)(CV)跟蹤模型;勻加速直線運(yùn)動(dòng)目標(biāo)(CA)跟蹤模型}
模型集2~模型集6為不同高低角變化率的勻速圓周運(yùn)動(dòng)目標(biāo)(CT)跟蹤模型組合,每一個(gè)模型集里面包含四個(gè)不同高低角變化率和方位角變化率的CT跟蹤模型。
上述模型集中,模型集1針對目標(biāo)的直線運(yùn)動(dòng),模型集2~6針對目標(biāo)的曲線運(yùn)動(dòng),各模型集中的子模型均為典型單目標(biāo)跟蹤模型[8~9]。
3.2 機(jī)動(dòng)檢測準(zhǔn)則設(shè)計(jì)
采用滑窗式[7]檢測法,記當(dāng)前時(shí)刻位置濾波誤差為D,檢測門限為m。當(dāng)D>m時(shí),判定目標(biāo)發(fā)生機(jī)動(dòng);當(dāng)D<m時(shí),判定目標(biāo)機(jī)動(dòng)消除。
3.3 最佳模型集合選擇準(zhǔn)則設(shè)計(jì)
若模型集1的IMM濾波結(jié)果符合機(jī)動(dòng)檢測準(zhǔn)則,則確定目標(biāo)做直線運(yùn)動(dòng),該集合為最佳模型集合;若模型集2~6中某一模型集的IMM濾波結(jié)果符合機(jī)動(dòng)檢測準(zhǔn)則,則確定目標(biāo)做曲線運(yùn)動(dòng),該集合為最佳模型集合。
3.4 VSMM算法流程
以觀測系統(tǒng)輸入的第一次觀測值為濾波器的初值,濾波器從k=1開始工作。
2)算法描述
Step1:對VSMM進(jìn)行初始化,輸入初值X1,P1;
Step2:對各模型集進(jìn)行IMM濾波;
Step3:判斷出各模型集中新息殘差最小的模型集a,輸出模型集a的濾波結(jié)果;
Step4:更新量測值;
Step5:對模型集a進(jìn)行IMM濾波,若濾波結(jié)果未檢測到目標(biāo)機(jī)動(dòng),則輸出模型集a的濾波結(jié)果;若濾波結(jié)果檢測到目標(biāo)機(jī)動(dòng),則激活其它模型集,并利用a在k-1時(shí)刻的結(jié)果對各模型集進(jìn)行重新初始化;
Step6:是否停止解算?是,結(jié)束;否則,轉(zhuǎn)Step3。
流程圖如圖3所示。
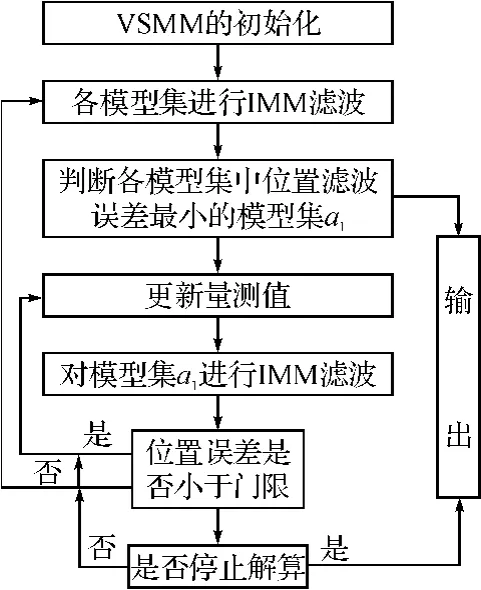
圖3 VSMM濾波算法流程圖
4 仿真實(shí)現(xiàn)
為了驗(yàn)證本文所提算法的有效性,對本文算法與傳統(tǒng)IMM算法進(jìn)行蒙特卡洛仿真實(shí)現(xiàn),并對兩種算法的跟蹤性能進(jìn)行比較分析。
4.1 仿真初始設(shè)定
設(shè)目標(biāo)在三維空間內(nèi)進(jìn)行機(jī)動(dòng),前2s做速度為850m/s的勻速直線運(yùn)動(dòng),2~6s做加速度100m/s的勻加速運(yùn)動(dòng),6~10s做方位角速度0.2rad/s、高低角速度0.1rad/s的勻速轉(zhuǎn)彎運(yùn)動(dòng):初始斜距11325m;雷達(dá)采樣率50Hz;采樣持續(xù)時(shí)間10s;觀測距離隨機(jī)誤差5m;觀測距變率隨機(jī)誤差2m/s;觀測方位角、高低角隨機(jī)誤差0.9mrad;觀測方位角、高低角變化率隨機(jī)誤差0.5mrad/s。
4.2 仿真結(jié)果
圖5~圖10顯示,對x、y軸位置信息來說,在目標(biāo)尚未發(fā)生機(jī)動(dòng)的0~2s,兩種濾波算法的效果相差不大,這是由于兩種算法采用同樣跟蹤子模型進(jìn)行濾波的原因;但在目標(biāo)機(jī)動(dòng)發(fā)生后,VSMM算法的濾波效果要明顯好于IMM算法;對x、y軸速度信息來說,不論目標(biāo)是否作機(jī)動(dòng),VSMM的濾波效果始終好于IMM;兩種算法對z軸位置信息和速度信息的濾波效果相差不大。這說明采用本文的機(jī)動(dòng)檢測方法后,濾波算法對三維空間中作機(jī)動(dòng)的目標(biāo)跟蹤能力有了較明顯提高,但對于不作機(jī)動(dòng)的目標(biāo)而言,跟蹤效果改善并不明顯。
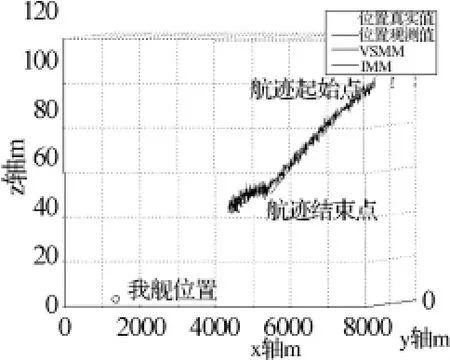
圖4 目標(biāo)運(yùn)動(dòng)軌跡及兩種濾波模擬
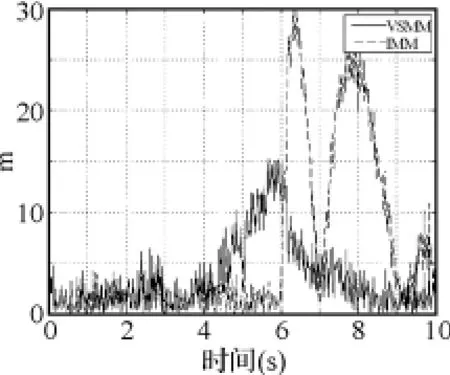
圖5 x方向的位置濾波誤差比較圖
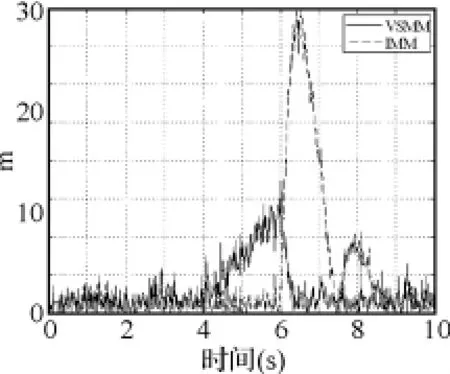
圖6 Y方向的位置濾波誤差比較圖
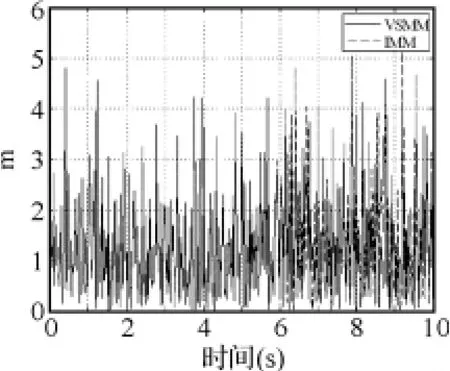
圖7 Z方向的位置濾波誤差比較圖
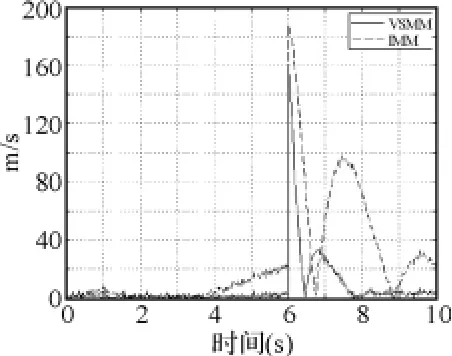
圖8 X方向的速度濾波誤差比較圖
5 結(jié)語
本文在分析典型多模型算法(IMM)不足的基礎(chǔ)上,通過改進(jìn)現(xiàn)有變結(jié)構(gòu)交互多模型算法(VSMM),將檢測門限設(shè)置為目標(biāo)跟蹤位置誤差門限,根據(jù)對目標(biāo)位置信息的誤差檢測來判定目標(biāo)是否作機(jī)動(dòng)。仿真實(shí)驗(yàn)證明,該方法可有效提高多模型算法對三維空間機(jī)動(dòng)目標(biāo)的濾波效果,具有一定理論價(jià)值。
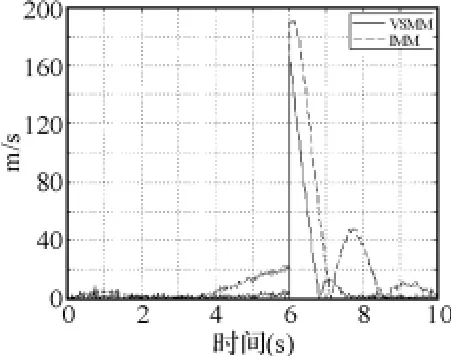
圖9 Y方向的速度濾波誤差比較圖
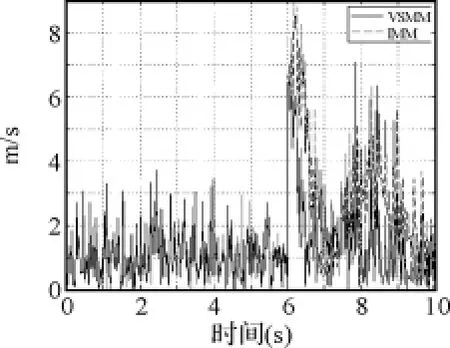
圖10 Z方向的速度濾波誤差比較圖
[1]周宏仁,敬忠良.機(jī)動(dòng)目標(biāo)跟蹤[M].北京:國防工業(yè)出版社,1991:19-21,25,31-32.
[2]Blom H A,Bar-Shalom Y.The Interacting Multiple Model Algorithm for Systems with Markovian Switching Coefficients[J].IEEE Trans.On Automatic Control,1988,33(8):780-783.
[3]Mazor E,Averbuch A,Bar-Shalom Y,et al.Interacting Multiple Model Methods in Target Tracking:A Survey[J].IEEE Trans.On Aerospace and Electronic Systems,1998,34(1):103-123.
[4]LI X R,Bar-Shalom Y.Multiple Model Estimation with Variable Structure[J].IEEE Transactions on Automatic Control,1996,24(1):478-493.
[5]Kirubarajan T,Bar-Shalom Y,Pattipatik P,et al.Ground Target Tracking with Variable Structure IMM Estimator[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(1):26-44.
[6]A.T.Alouani,P.Xia,T.R..Rice,et al.Two-stage Kalman eastimator for tracking maneuvering targets[J].Conf.Proc.1991IEEE International Conference on systems,Man,and Cybernetics.Decision Aiding for Complex Systems,1991(2):761-766.
[7]范紅旗,王勝,付強(qiáng).目標(biāo)機(jī)動(dòng)檢測算法綜述[J].系統(tǒng)工程與電子技術(shù),2009(5):1064-1070.
[8]何友.雷達(dá)數(shù)據(jù)處理及應(yīng)用[M].北京:電子工業(yè)出版社,2005:132-137.
[9]石章松,周豐,孫世巖.目標(biāo)跟蹤與數(shù)據(jù)融合理論及其應(yīng)用[M].武漢:海軍工程大學(xué),2007:145-217.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12