差分GPS應(yīng)用于機載雷達精度統(tǒng)計的方法研究
2012-06-05 13:29:22牟聰王偉張明
火控雷達技術(shù) 2012年3期
牟聰王偉張明
(西安電子工研究所 西安 710100)
1 引言
雷達精度是衡量雷達戰(zhàn)術(shù)性能的的重要指標(biāo),目前在國內(nèi)外的精度評估研究中,很多是使用仿真數(shù)據(jù)來進行的,與實際情況存在較大差異,也有采用目標(biāo)模擬器驗證受試?yán)走_的距離、方位、速度等相關(guān)數(shù)據(jù)精度,但是由于對于機載雷達數(shù)據(jù)的處理,涉及到機載慣導(dǎo)的補償精度、伺服系統(tǒng)的精準(zhǔn)度等,因此這種方法存在極大的局限性,而且準(zhǔn)確度和實際使用結(jié)合很不緊密。本文介紹一種基于差分GPS的機載雷達精度統(tǒng)計分析方法,相對于傳統(tǒng)的方法,具有涉及的設(shè)備數(shù)量少,人員投入少、準(zhǔn)備時間短的優(yōu)點,并且已經(jīng)成功地應(yīng)用于某機載雷達的定型掛飛試驗,保障了項目的成功定型。
2 相關(guān)理論
差分GPS上報的是基于WGS-84坐標(biāo)系的球坐標(biāo)數(shù)據(jù),即經(jīng)度、緯度、高度,除此之外,GPS通常還上報東速、北速、天速等數(shù)據(jù),可用于目標(biāo)的速度精度評估。地面上某一點的經(jīng)度為過該點的橢球子午面與格林威治起始子午面的夾角,大地緯度為過該點的橢球法線與橢球赤道面的夾角,高度為該點沿橢球面法線至橢球面的距離,機載雷達通常為了導(dǎo)彈或者炮彈制導(dǎo)的要求,所上報的目標(biāo)坐標(biāo)數(shù)據(jù)都是基于載機坐標(biāo)系,為了驗證雷達上報目標(biāo)數(shù)據(jù)精度,可以用高精度的GPS作為基準(zhǔn)真值,與雷達的數(shù)據(jù)進行匹配,來計算雷達的精度,要完成上述的功能,需完成如圖1所示的坐標(biāo)轉(zhuǎn)換。?

圖1 坐標(biāo)轉(zhuǎn)換順序框圖
2.1 相關(guān)坐標(biāo)系的定義
a.GPS 坐標(biāo)系[1]
GPS最常用的坐標(biāo)系是WGS-84坐標(biāo)。
WGS-84是一個協(xié)議地球參考系CTS。該坐標(biāo)系的原點是地球的質(zhì)心,Z軸指向 BIH1984.0定義的協(xié)議地球極 CTP(Conventional Terrestrial Pole),X軸指向BIH1984.0零度子午面和CTP赤道的交點,Y軸和Z、X軸構(gòu)成右手坐標(biāo)系。
b.載機坐標(biāo)系[2]
載機坐標(biāo)系原點定義為載機的質(zhì)心或者幾何中心,X軸以載機縱軸機頭為正向,Y軸定義為右翼正向,Z軸通過右手螺旋定則確定指向機體下方。
c.載機地理坐標(biāo)系[2]
載機地理坐標(biāo)系的原點是載機的質(zhì)心或者幾何中心,也就是說和載機坐標(biāo)系是同心的,X軸指向載機所在地理位置的正北方N,Y軸指向載機所在地理位置的正東方E,Z軸與X,Y軸構(gòu)成右手坐標(biāo)系,指向機體下方,又稱為NED坐標(biāo)系。
2.2 相關(guān)的的坐標(biāo)轉(zhuǎn)換方法
a.GPS坐標(biāo)系到WGS-84坐標(biāo)系的轉(zhuǎn)換[2]
假定目標(biāo) GPS 坐標(biāo)為(Bt,Lt,Ht),其對應(yīng)的WGS-84 坐標(biāo)系直角坐標(biāo)為(Xt,Yt,Zt)
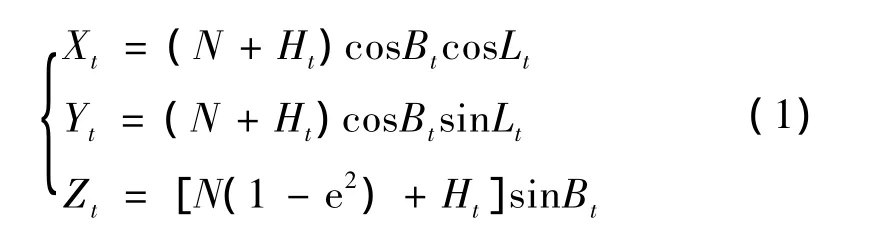


從(1)式同樣可以得到載機所在的WGS-84坐標(biāo)系的坐標(biāo),記為(Xr,Yr,Zr),其中假定雷達載機的GPS 坐標(biāo)為(Br,Lr,Hr)。
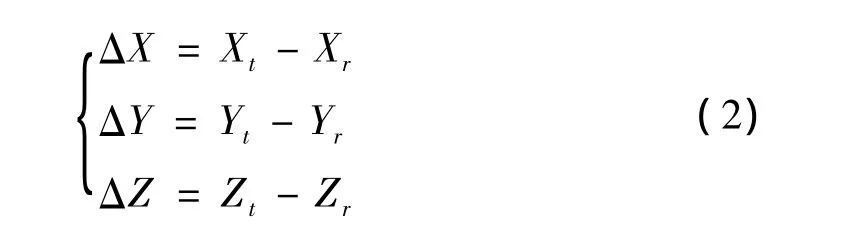
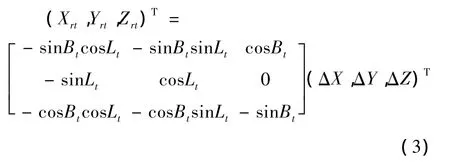
b.WGS-84坐標(biāo)系到載機地理坐標(biāo)系的轉(zhuǎn)換[3]為了得到目標(biāo)在載機地理坐標(biāo)系中的坐標(biāo)數(shù)據(jù),必須通過如下兩步坐標(biāo)轉(zhuǎn)換:坐標(biāo)平移、坐標(biāo)旋轉(zhuǎn)。這里所謂坐標(biāo)平移就是將目標(biāo)的WGS-84大地坐標(biāo)系數(shù)據(jù)平移至以雷達載機地理坐標(biāo)系的原點為原點,其三軸分別平行于WGS-84大地坐標(biāo)系的坐標(biāo)系,轉(zhuǎn)換過程如下式:
則目標(biāo)位于載機地理坐標(biāo)系的目標(biāo)坐標(biāo)(Xrt,Yrt,Zrt)為:
c.載機地理坐標(biāo)系到載機坐標(biāo)系的轉(zhuǎn)換
一般的機載雷達目標(biāo)數(shù)據(jù)的觀測總是基于載機坐標(biāo)系,我們假設(shè)當(dāng)前載機的姿態(tài)角為(α,β,γ),其中α為載機的橫滾角,β為目標(biāo)的縱搖角,γ為目標(biāo)的偏航角,則對應(yīng)的變換矩陣我們記為C,我們可以稱C為姿態(tài)矩陣,C的表達式如下[1]:
則使用上式中的姿態(tài)矩陣C,可以得到轉(zhuǎn)換到載機坐標(biāo)系中的目標(biāo)坐標(biāo)(X,Y,Z):


d.載機坐標(biāo)系直角坐標(biāo)向極坐標(biāo)的轉(zhuǎn)換
由于雷達的觀測所提供的數(shù)據(jù)是基于載機坐標(biāo)系的極坐標(biāo)數(shù)據(jù),因此我們得到上述的載機坐標(biāo)系的直角坐標(biāo)數(shù)據(jù)后還需要將其轉(zhuǎn)換到相應(yīng)的極坐標(biāo)形式,轉(zhuǎn)換公式如下:
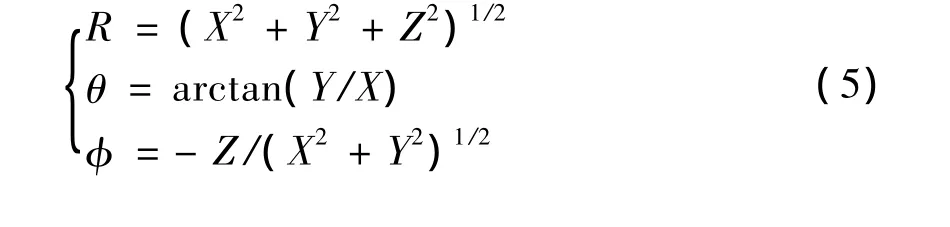
式中,R為目標(biāo)的距離,θ為目標(biāo)的方位角,φ為目標(biāo)的俯仰角。
2.3 徑向速度的計算
假設(shè)目標(biāo)的GPS上報的速度向量為(Vte,Vtn,Vtu),其中 Vte為東速,Vtn為北速,Vtu為天速,載機GPS上報的速度向量為(Vre,Vrn,Vru),各個分量的定義與目標(biāo)GPS的向量定義相同。為了計算徑向速度的大小,需要計算出速度兩者的速度差:
根據(jù)(3)式的結(jié)果,對于目標(biāo)相對于雷達的徑向速度計算:

2.4 數(shù)據(jù)的時間對齊
對于機載雷達的應(yīng)用實際,尤其在對空試飛中,目標(biāo)和雷達載機相對飛行時,對于目前GPS較常采用采樣頻率20Hz和50Hz來說,每一次的采樣間隔之間,目標(biāo)和載機的相對距離變化都會達到數(shù)米,因此會引入較大的誤差,如果要準(zhǔn)確的得到目標(biāo)觀測數(shù)據(jù)的誤差,需要將GPS數(shù)據(jù)按照時間外推到雷達所觀測目標(biāo)的時刻上,這樣才能做出更加客觀和準(zhǔn)確的對比。在實際中,我們可以假設(shè)雷達對目標(biāo)的觀測時間為t,GPS的采樣間隔為T,假設(shè)GPS第nT和第(n+1)T個時刻雷達有觀測值,且nT<t<(n+1)T,則不失一般性,假設(shè)GPS在nT時刻的采樣值為χn,在(n+1)T時刻的采樣值為χn+1,在t時刻的值χt:

通過上式,就可以將GPS的觀測信息外推到雷達的觀測時刻t上,完成時間的對齊,通常對于機載雷達來說,載機的速度通常不會在1/20s或者1/50s發(fā)生明顯變化,較地面雷達來說,機動比較平緩,因此上述的(8)式可以達到相當(dāng)高的外推準(zhǔn)確度。
2.5 數(shù)據(jù)的統(tǒng)計
GJB2137-8-94對統(tǒng)計數(shù)據(jù)計算方法規(guī)定如下[4]:
a.系統(tǒng)誤差的統(tǒng)計
系統(tǒng)誤差按照測量誤差值的數(shù)學(xué)期望進行統(tǒng)計,計算公式為:

b.隨機誤差的統(tǒng)計
隨機誤差按照測量值的均方差進行統(tǒng)計:
(四)通過內(nèi)部控制推動指標(biāo)動態(tài)優(yōu)化,實現(xiàn)指標(biāo)設(shè)定與單位事權(quán)相一致。在評價過程中,各單位要將預(yù)算績效的通用指標(biāo)根據(jù)自身特點進行調(diào)整,制定出一套科學(xué)、合理、持續(xù)優(yōu)化的績效評價指標(biāo)體系。績效評價指標(biāo)的建立要充分考慮到本單位的預(yù)算效益,同時要提高對評價指標(biāo)設(shè)定的重視程度,形成具有本單位特色的績效評價指標(biāo)體系。從更廣的角度看,還應(yīng)注意指標(biāo)信息積累,收集不同單位和部門的績效評價指標(biāo),進一步補充完善評價指標(biāo)體系,建立一整套覆蓋范圍廣、適用性強的指標(biāo)體系,可建立指標(biāo)庫。

在上述的(9)、(10)式中:M(X)為系統(tǒng)誤差分量,σ為隨機誤差分量,n為有效實驗次數(shù),mi為第i次試驗數(shù)據(jù)采樣點數(shù),Xij為第i次試驗中第j個采樣時刻的雷達目標(biāo)坐標(biāo)值。
c.數(shù)據(jù)精度是否滿足的判決
當(dāng)系統(tǒng)誤差和隨機誤差符合相關(guān)的機載雷達戰(zhàn)術(shù)技術(shù)指標(biāo)要求時,則認(rèn)為精度滿足要求,否則,則認(rèn)為不滿足。對于機載雷達來說,在精度掛飛前,一般已經(jīng)進行了地面靜態(tài)校靶和飛行狀態(tài)動態(tài)校靶,所以可以認(rèn)為系統(tǒng)誤差已經(jīng)消除,只要隨機誤差滿足要求即可。
3 應(yīng)用實例
在應(yīng)用實例中,在載機和目標(biāo)機上各加裝一臺差分GPS接收機,采用的是NovAtel高精度存儲型差分GPS接收機,型號為DL-V3,它具有如下幾方面和精度評估相關(guān)的指標(biāo):
測量目標(biāo)距離:≤50km;連續(xù)使用時間:≤6h;定位數(shù)據(jù)更新率:50Hz;時間精度:20ns;速度精度:0.03m/s;速度限制:≤515m/s
運動測量精度:
基線長:0~15km 定位精度:≤20cm
基線長度:15~50km 定位精度:≤50cm
3.1 適用性分析
根據(jù)誤差傳遞函數(shù):即設(shè)函數(shù)y=f(x1,x2,…,xn),其中x1,x2…xn為具有均方根誤差 σx1,σx2…σxn的獨立的變量,函數(shù)y=f(x1,x2,…,xn)具有對每一個變量的連續(xù)偏導(dǎo)數(shù),則:

對于本應(yīng)用,假設(shè)雷達載機的GPS大地坐標(biāo)系坐標(biāo)為(x1,y1,z1),目標(biāo)的 GPS 大地坐標(biāo)為(x1,y2,z2),則距離應(yīng)該為:

對x1-x2分量,其最大的精度誤差根據(jù)(10)式和GPS的參數(shù),令x=x1-x2。可得:

同理,令 y=y1- y2,z=z1- z2,有如下式成立:

對于(11)式可簡化如下:


由式(10)可得由于GPS的精度誤差導(dǎo)致的距離精度誤差為:由于GPS的定位精度最大不超過50cm,因此即使兩者的誤差在方位向上疊加,對方位向上在1km時對方位的影響不超過0.1°。
同理,可以證明由于GPS的測速誤差導(dǎo)致的徑向速度精度誤差遠遠小于1m/s。
對于機載雷達的精度要求一般要求距離精度小于10m,方位精度小于0.5°,速度精度小于10m/s,而對設(shè)備的使用一般要求標(biāo)準(zhǔn)測量設(shè)備的精度小于被測精度的1/3,所選差分GPS顯然能很好的滿足應(yīng)用的要求。
3.2 試飛應(yīng)用
在試飛數(shù)據(jù)的處理時,由于一般對于不同操作系統(tǒng)對文件大小的限制和不同的模式需要存儲在不同的文件中,因此,一次掛飛的數(shù)據(jù)存儲在若干個數(shù)據(jù)文件中。在實際的使用中,應(yīng)先對文件進行時間上的排序,并對不同距離段、不同參數(shù)情況分別統(tǒng)計精度結(jié)果,具體步驟如下:
a.文件初始化
主要完成數(shù)據(jù)處理的目標(biāo)數(shù)據(jù)文件按時間排序,并將每一個文件或者文件不同的數(shù)據(jù)幀所對應(yīng)的雷達操作控制參數(shù)進行標(biāo)記。
b.目標(biāo)匹配
由于數(shù)據(jù)處理所存儲的目標(biāo)數(shù)據(jù),既有合作目標(biāo)的,也有大量非合作目標(biāo)的,因此要做精度統(tǒng)計,必須將合作目標(biāo)的航跡提取出來,對每一個數(shù)據(jù)文件,按順序?qū)⑺心繕?biāo)數(shù)據(jù)逐次和同一時刻的目標(biāo)GPS、載機GPS按(1)式~(7)式計算出的數(shù)據(jù)做匹配,可以預(yù)先設(shè)置門限,當(dāng)距離、方位、速度、俯仰差值小于預(yù)置門限時,則認(rèn)為是匹配上的,即數(shù)據(jù)處理的某一目標(biāo)數(shù)據(jù)為合作目標(biāo),否則,則不是。
對于匹配上的目標(biāo),有可能某一時刻有兩個目標(biāo)都和真實的GPS都匹配上,這時候則要根據(jù)運動趨勢規(guī)律將和真實目標(biāo)GPS變化規(guī)律不一樣的剔除,只有航跡存在時間段運動規(guī)律和GPS變化規(guī)律相同的才能認(rèn)為是合作目標(biāo)。
c.精度統(tǒng)計
以匹配上的目標(biāo)數(shù)據(jù)點作為觀測點,將匹配上的GPS位置外推到目標(biāo)所在的時刻,作為真值,按照(9)、(10)式進行精度統(tǒng)計并判定。
使用如上方法已經(jīng)成功的開發(fā)出了相應(yīng)的軟件,軟件主界面如圖2所示。
圖2 精度統(tǒng)計軟件主界面
4 結(jié)論
上述所構(gòu)建的方法通過在某型雷達定型掛飛中的實際應(yīng)用,成功的保證了雷達的成功定型,也驗證了其方法的可行性和正確性。由于其在精度計算時,根據(jù)(9)要計算系統(tǒng)誤差,因此,其也可以應(yīng)用于機載雷達的動態(tài)校靶,具有良好的可推廣性。
[1]李征航,黃勁松.GPS測量與數(shù)據(jù)處理[M].武漢:武漢大學(xué)出版社,2005.
[2]常軍.機載雷達目標(biāo)的大地坐標(biāo)定位[J].電訊技術(shù),2003,(2):97 ~100.
[3]田偉.雷達精度實驗中GPS數(shù)據(jù)坐標(biāo)轉(zhuǎn)換及誤差分析[J].雷達與對抗,2007,(2):54~56.
[4]曹桂蘭等.GJB 2137-8-94.機載雷達通用要求-飛行驗證要求[S].中華人民共和國國家軍用標(biāo)準(zhǔn).
