模糊控制在直線感應(yīng)電機磁場定向控制中的應(yīng)用
2012-06-02 05:31:02張云紅曾成碧肖先勇
電機與控制應(yīng)用 2012年5期
張云紅, 曾成碧, 徐 偉, 肖先勇
(1.四川大學(xué)電氣信息學(xué)院,四川成都 610065;
2.墨爾本皇家理工學(xué)院工程技術(shù)研究所,澳大利亞墨爾本 3001)
0 引言
單邊直線電機(以下簡稱“直線電機”)軌道交通系統(tǒng)作為一種新興的城市運輸方式,從20世紀80年代起,已經(jīng)應(yīng)用于許多城市的軌道交通系統(tǒng)中,比如加拿大溫哥華、日本東京、美國底特律、馬來西亞吉隆坡以及中國的廣州和北京等[1-2]。目前直線電機在各高校和企業(yè)都成為研究的熱點。直線電機驅(qū)動系統(tǒng)結(jié)構(gòu)簡單,不靠輪和軌之間的摩擦力,而是直接依賴初次級間電磁感應(yīng)原理所產(chǎn)生的水平推力,因此該系統(tǒng)具有很好的加減速性能和較強的爬坡能力[3-4]。但由于它相當于旋轉(zhuǎn)電機沿半徑中軸切開并水平展開,在其運行時,會產(chǎn)生縱向邊緣效應(yīng),引起氣隙有效磁通和牽引力系數(shù)降低[5]。所以直線電機的數(shù)學(xué)模型雖由旋轉(zhuǎn)電機而來,但比其更加復(fù)雜。本文引用J.Duncan[6-8]提出的直線電機數(shù)學(xué)模型,它考慮了電機的縱向邊緣效應(yīng),與實際情況相符。在此基礎(chǔ)上,建立了直線電機轉(zhuǎn)子磁場定向控制的仿真模型。傳統(tǒng)PI控制器算法簡單,穩(wěn)定性高。但其基于線性系統(tǒng)設(shè)計,且參數(shù)固定,對于參數(shù)不斷變化的直線電機,其控制性能會大打折扣[9]。模糊控制不依賴于控制對象的數(shù)學(xué)模型,能夠模仿人的思維且將人的經(jīng)驗帶入控制過程中[10-11]。文中將PI控制和模糊控制結(jié)合起來,設(shè)計了模糊自適應(yīng)PI控制器,它能根據(jù)外部的變化,及時調(diào)節(jié)PI控制器的比例系數(shù)(KP)和積分系數(shù)(KI),使其適應(yīng)外部環(huán)境。將此控制器用在仿真模型的速度環(huán)中。仿真結(jié)果表明,模糊自適應(yīng)PI控制器能夠克服控制系統(tǒng)的參數(shù)變化和非線性等因素,使其具有更快的速度跟蹤能力,更強的抗擾性和更好的魯棒性。
1 直線電機次級(轉(zhuǎn)子)磁場定向控制原理
1.1 直線電機數(shù)學(xué)模型
根據(jù)旋轉(zhuǎn)電機理論,本文建立了在次級磁場定向同步坐標系下的直線電機數(shù)學(xué)模型,主要總結(jié)如下[12]。
初次級電壓方程:

初次級磁鏈方程:
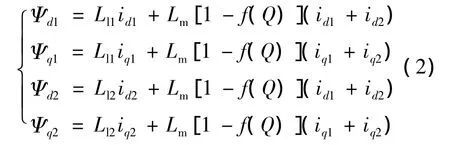

上述方程中的f(Q)為邊緣效應(yīng)量化函數(shù),其表達式如下:

電機推力方程:
其中:ud1,uq1——分別為 d、q 軸初級電壓;
Ψd1,Ψq1——分別為 d、q軸初級磁鏈;
Ψd2,Ψq2——分別為 d、q軸次級磁鏈;
ω1——同步角頻率;
ω2——運動電角速度;
R1、R2——分別為初、次級電阻;
id1、iq1——分別為 d、q 軸初級電流;

Tv——初級通過空間一點的時間;
T2——渦流的衰減時間常數(shù);
D——電機初級長度;v——電機線速度;ωsl——滑差頻率。
1.2 磁場定向控制原理
磁場定向分為氣隙磁場、定子磁場和轉(zhuǎn)子磁場定向。由于氣隙磁場和定子磁場定向控制方式復(fù)雜,本文采用轉(zhuǎn)子磁場定向控制。

滑差頻率方程:id2、iq2——分別為 d、q 軸次級電流;Lm——勵磁電感;
Ll1、Ll2——分別為初、次級漏感;
τ——初級極距;
L2——次級自感;
p——微分算子;轉(zhuǎn)子磁鏈角度方程:

次級磁鏈方程:

2 仿真模型介紹
在MATLAB/Simulink中建立的直線感應(yīng)電機磁場定向控制結(jié)構(gòu)如圖1所示。該模型包含一個速度控制的外閉環(huán)和兩個初級電流控制的內(nèi)閉環(huán)。外閉環(huán)采用模糊自適應(yīng)PI控制器,兩個內(nèi)閉環(huán)采用PI控制器。逆變器采用SVPWM算法,直線感應(yīng)電機的模型基于J.Duncan的數(shù)學(xué)模型。
PI控制是一種成熟的控制方法,并廣泛應(yīng)用于工業(yè)控制系統(tǒng)中,其控制原理如圖2所示。比例調(diào)節(jié)能夠按比例反應(yīng)系統(tǒng)偏差,一旦系統(tǒng)出現(xiàn)偏差,它將立即作用以減少偏差。比例系數(shù)大,能夠減少調(diào)節(jié)時間,但過大會降低系統(tǒng)穩(wěn)定性,甚至造成系統(tǒng)不穩(wěn)定。積分調(diào)節(jié)的目的是消除系統(tǒng)穩(wěn)態(tài)誤差。只要系統(tǒng)存在穩(wěn)態(tài)誤差,積分作用就一直進行,直至誤差消除。積分系數(shù)越小,積分作用就越強。但引入積分調(diào)節(jié)使系統(tǒng)穩(wěn)定性下降,動態(tài)響應(yīng)變慢。

圖1 直線電機磁場定向控制結(jié)構(gòu)圖

圖2 PI控制器結(jié)構(gòu)圖
文中結(jié)合PI控制和模糊控制設(shè)計的模糊自適應(yīng)PI控制器結(jié)構(gòu)如圖3所示。該控制器是一個雙輸入雙輸出的系統(tǒng)。輸入為運動電角速度誤差(e)和其誤差變化率(ec),輸出為ΔKP和ΔKI。

圖3 模糊自適應(yīng)PI控制器結(jié)構(gòu)圖
該控制器通過模糊控制器的輸出ΔKP和ΔKI調(diào)節(jié)PI控制器的比例系數(shù)和積分系數(shù),可表述為

式中,K'P和K'I為調(diào)整后的KP和KI。
模糊控制器的整個控制過程包括三個部分:輸入模糊化、模糊推理和輸出反模糊化,如圖4所示。
(1)輸入模糊化。如圖4所示,E和EC為輸入e和ec的模糊變量。設(shè)輸入和輸出的論域均為{-6,-5,- 4,- 3,- 2,- 1,0,1,2,3,4,5,6}。量化因子Ke和Kc用于模糊化輸入變量,如式(10)所示:

(2)模糊推理。定義模糊集合為{NB,NM,NS,Z,PS,PM,PB},其隸屬度函數(shù)如圖 5 所示。NB和PB的隸屬度函數(shù)分別為Z型隸屬度函數(shù),其余為三角形隸屬度函數(shù)。

圖5 輸入輸出的隸屬度函數(shù)
專家建議或經(jīng)驗在模糊控制系統(tǒng)中被轉(zhuǎn)換為控制規(guī)則。根據(jù)輸入的模糊集合,該模糊控制器的輸出均有49條控制規(guī)則,如表1和表2所示,且采用Mamdani模糊推理方法。Kp和KI的輸出表面如圖6和圖7所示。
(3)輸出反模糊化。Kp和KI為ΔKP和 ΔKI的模糊變量。ΔKP和ΔKI為系統(tǒng)輸出的精確控制量。y1和y2為比例因子。反模糊化可描述為

表1 Kp的控制規(guī)則

表2 KI的控制規(guī)則


圖6 Kp的輸出表面
3 仿真結(jié)果和分析
模糊自適應(yīng) PI控制器的主要參數(shù):Kp=0.06,KI=1,y1=0.1,y2=0.5。直線電機的主要參數(shù)如表3所示。

圖7 Ki的輸出表面

表3 直線感應(yīng)電機主要參數(shù)
為比較PI控制器和模糊自適應(yīng)PI控制器的性能,分別在兩種情況下進行仿真:(1)電機空載起動至線速度為5.6 m/s,并在第5 s時突然停止運動;(2)電機帶1 000 N負載起動至線速度為5.6 m/s,并在第5 s時突然停止運動。為簡化分析,該仿真忽略空氣和輪軌間等一切形式的摩擦力。
通過空載和帶負載的直線電機線速度曲線可看出,在速度環(huán)采用模糊自適應(yīng)PI控制器的直線電機控制系統(tǒng)中,電機起動時線速度能較快達到設(shè)定值(空載時,采用模糊自適應(yīng)PI控制器和PI控制器的系統(tǒng)上升時間分別為 0.105 s和0.118 s;帶負載時,分別為0.12 s和 0.127 s),說明該控制系統(tǒng)具有較好的跟隨性能;電機制動時能較快停止且未出現(xiàn)超調(diào)和穩(wěn)態(tài)誤差。這是因為空載起動和突然制動相當于速度發(fā)生了突變,在模糊自適應(yīng)PI控制器的調(diào)節(jié)下,速度環(huán)可以根據(jù)速度反饋量的變化大小和快慢,實時地修正其比例系數(shù)和積分系數(shù),使其適應(yīng)外界的變化,從而系統(tǒng)具有更好的抗擾性和魯棒性,具體如圖8和圖9所示。

圖8 空載時直線電機仿真圖形
在兩種工況下,電機推力在傳統(tǒng)PI和自適應(yīng)PI的調(diào)節(jié)下,其最后的變化曲線幾乎重合。這是因為對于推力控制,電流采取了限流措施,以防止電機燒壞。在飽和的狀態(tài)下,采用模糊自適應(yīng)PI控制器的控制系統(tǒng)和采用PI控制器的控制系統(tǒng)的輸出是一樣的,都為電流限幅的上限;推力電流都采用相同的PI控制器,所以輸出的推力電流相同,因此輸出的推力也一樣。勵磁電感的曲線驗證了勵磁電感隨電機速度的上升而逐漸衰減。

圖9 帶1 000 N負載時直線電機仿真圖形
4 結(jié)語
本文結(jié)合PI控制和模糊控制的優(yōu)點,設(shè)計了一種模糊自適應(yīng)PI控制器,將其應(yīng)用在直線電機轉(zhuǎn)子磁場定向控制的速度環(huán)中。其中根據(jù) J.Duncan對邊端效應(yīng)的直線電機互感的校正系數(shù),本文利用MATLAB/Simulink中的模糊邏輯工具箱建立了模糊自適應(yīng)PI控制器的仿真模型,并分別在空載和帶載的情況下進行了仿真研究,并與傳統(tǒng)的PI控制策略進行了對比。大量仿真結(jié)果表明:采用模糊自適應(yīng)PI控制器的控制系統(tǒng)具有較好的跟隨性能、抗擾性和魯棒性。
[1]徐偉,李耀華,孫廣生,等.交通用大功率直線異步電動機牽引特性[J].電工技術(shù)學(xué)報,2008,23(7):14-20.
[2]王珂,史黎明,何晉偉,等.單邊直線感應(yīng)電機法向力牽引力解耦控制[J].中國電機工程學(xué)報,2009,29(6):100-104.
[3]楊偉民,徐月同,陸華才,等.基于DSP的永磁同步直線電機無位置傳感器控制系統(tǒng)[J].電機與控制應(yīng)用,2007,34(4):28-32.
[4]任晉旗,李耀華,王珂.直線異步電動機的損耗模型與效率優(yōu)化控制[J].電工技術(shù)學(xué)報,2009,24(12):68-73.
[5]潘霞遠,劉希喆,吳捷,等.永磁同步直線電機的魯棒PID控制[J].電機與控制應(yīng)用,2008,35(9):34-38.
[6]DUNCAN J,ENG C.Linear induction motor-equivalent-circuit model[J].IEE Proceeding of Electrical Power Application,1983,130(1):51-57.
[7]W X,ZHU J G.An improved equivalent circuit model of a single-sided linear induction motor[J].IEEE Transactions on Vehicular Technology,2010,59(5):2277-2289.
[8]W X,ZHU J G.Equivalent circuits for single-sided linear induction motors[J].IEEE Trans Ind Appl,2010,46(6):2410-2423.
[9]TURSINI M,PARASILITI F,ZHANG D Q.Realtime gain tuning of PI controllers for high-performance PMSM drives[J].IEEE Trans Appl,2002,38(4):1018-1026.
[10]葉云岳,陸凱元.直線電機的PID控制與模糊控制[J].電工技術(shù)學(xué)報,2001,16(3):11-15.
[11]WAI R J,CHU C C.Motion control of linear induction motor via Petri fuzzy neural network[J].IEEE Trans Ind Electron,2007,54(1):281-295.
[12]任晉旗,李耀華,徐偉,等.直線感應(yīng)電機在線參數(shù)辨識[J].中國電機工程學(xué)報,2008,28(24):113-117.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
華人時刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45