改進的SURF 算法及其在目標跟蹤中的應用
2012-04-21 01:55:12劉少鵬郎躍東丁祝順
傳感器與微系統(tǒng) 2012年12期
關鍵詞:特征
劉少鵬,郎躍東,丁祝順
(北京航天控制儀器研究所,北京100039)
0 引 言
基于局部不變特征匹配的目標跟蹤算法得到了廣泛研究。作為性能最好的局部不變特征之一,SURF 特征描述子應用在目標跟蹤中也獲得了良好的效果[1~3]。
與 GLOH,SIFT[4,5]等經(jīng)典局部不變特征描述子相比較,SURF 具有區(qū)分度好,運算速度快等優(yōu)點。但是在描述子生成階段,SURF[6]需要求取特征點鄰域像素的主方向,在區(qū)域內(nèi)以主方向為基準求取采樣點的Haar 小波響應,從而生成局部特征描述子,運算過程包含大量浮點運算,并且邏輯復雜,優(yōu)化難度大,基于SURF 的算法難于在嵌入式系統(tǒng)中實時實現(xiàn)。而在實際應用中目標跟蹤算法常常需要在嵌入式系統(tǒng)中實現(xiàn),這也限制了SURF 特征描述子更廣泛的應用。
針對以上問題,本文利用三角和對角線特征對SURF特征描述子生成過程進行了改進,避免了對特征點鄰域像素的Haar 特征求取與Haar 小波向主方向旋轉(zhuǎn)的運算。所提算法保留了SURF 算子的旋轉(zhuǎn)、尺度不變性,對模糊圖像的特征點匹配性能更好,簡化了實現(xiàn)過程,有效提高了運算速度,可以滿足目標跟蹤算法的應用要求。
1 SURF 特征描述子介紹
基于SURF 的特征點[7]匹配主要包括3 個步驟:1)SURF 特征點檢測;2)SURF 特征描述子生成;3)前后幀特征描述子匹配與提純。本文對SURF 算法的改進主要體現(xiàn)在SURF 特征描述子生成方面。首先利用SURF 特征點檢測算法獲取SURF 特征點。在獲取圖像特征點后,求取特征點鄰域主方向,以特征點為中心,沿主方向構(gòu)建一個正方形區(qū)域,區(qū)域尺寸大小為20 s ×20 s,s 為特征點的尺度值。將此區(qū)域分為4 ×4 個子塊,每個子塊中有5 s×5 s 個像元,使用尺寸2 s 的Haar 小波濾波器對子塊內(nèi)的圖像進行小波響應計算,共進行25 次采樣計算,分別得到以主方向為基準的dx 和dy 響應。如圖1 所示。
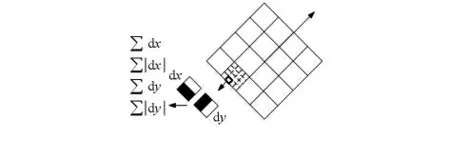
圖1 特征描述子求取Fig 1 Calculation of SURF descriptor
然后,以特征點為中心,對dy 和dx(以主方向為基準)進行高斯加權(quán)計算(σ=3.3 s)。最后對每個子塊的小波響應進行統(tǒng)計,為了體現(xiàn)不同的極性,同時也對每個子塊小波響應的絕對值進行統(tǒng)計,得到每個子塊的特征矢量
V= [∑dx,∑ | dx|,∑dy,∑ | dy|].
由于共有4 ×4 個特征子塊,因此,特征描述子為一個4 ×4 ×4 =64 維的特征矢量,即為特征點的描述表達。
為了簡化運算,SURF 特征描述子在積分圖像中利用盒子算法求取水平和垂直方向的Haar 響應,然后根據(jù)主方向?qū)x 和dy 進行旋轉(zhuǎn),即得到旋轉(zhuǎn)后的Haar 小波響應。
為了求得旋轉(zhuǎn)后的Haar 小波響應,需要將旋轉(zhuǎn)前的點坐標進行二維旋轉(zhuǎn)[3]。如圖2 所示,旋轉(zhuǎn)前圖像坐標為(l,k),旋轉(zhuǎn)后坐標為(x,y),旋轉(zhuǎn)后的坐標可以通過坐標旋轉(zhuǎn)公式得到

得到點(l,k)在旋轉(zhuǎn)后圖像中的坐標(x,y)后,利用積分圖像求得水平和垂直方向的 Haar 小波 dx',dy',對 dx',dy'進行加權(quán)處理,并將dx',dy'按照式(2)旋轉(zhuǎn)到特征點主方向,從而得到旋轉(zhuǎn)后的dx,dy。

2 改進的SURF 算法
針對SURF 算法需進行坐標旋轉(zhuǎn)和特征點計算優(yōu)化難度大等問題,本文利用三角特征和對角線特征設計了改進的SURF 特征描述子,利用子塊的三角特征和對角線特征取代圖1 所示子塊內(nèi)像素的Haar 小波特征,圖像子塊三角算子和對角線算子的實現(xiàn)如圖3 所示。

圖2 利用積分圖像求取Haar 響應示意圖Fig 2 Diagram of obtain Haar response using integral image

圖3 利用三角、對角線特征生成描述子Fig 3 SURF descriptor generation using triangle and diagonal featrues
與標準SURF 算法類似,三角算子和對角線算子實現(xiàn)同樣需要在每個圖像子塊內(nèi)取25 個采樣點,但是不對采樣點求Haar 小波,而是對25 個采樣點應用圖3 中所示三角算子和對角線算子來表示每個圖像子塊的局部特性,同樣每個圖像子塊可以得到一個四維的描述矢量
V=[T1T2C1C2].
T1,T2分別對應圖3 中對圖像子塊運用2 個三角算子得到的結(jié)果,C1,C2分別表示對圖3 中圖像子塊運用對角線算子得到的運算結(jié)果。
以三角算子計算為例,求取過程如圖4 所示。圖4 左圖為旋轉(zhuǎn)后的圖像,如欲求取某子塊的三角特征,須首先利用式(1)獲取旋轉(zhuǎn)后的坐標值(x1,y1)和(x2,y2),并根據(jù)(x1,y1)和(x2,y2)的坐標所屬區(qū)域分別乘以三角算子對應的正負系數(shù),然后進行累加,即得到某子塊的一個三角算子描述。
如上所述,在計算圖像子塊的三角特征和對角線特征時,只需將圖像的灰度值乘以對應的系數(shù)后直接進行累加運算,圖像的灰度值為標量,不存在旋轉(zhuǎn)的問題,避免了x和y 方向的Haar 小波求解和旋轉(zhuǎn)操作,節(jié)約了大量浮點運算的運算量。
類似可以獲得另外一種三角算子和2 個對角線算子的特征表示。

圖4 圖像子塊三角特征求取示意圖Fig 4 Calculation diagram of triangle feature of image sub-block
3 算法性能測試
3.1 匹配測試
本文對SURF 和改進SURF 算法的匹配效果進行了測試;測試主要包括旋轉(zhuǎn)、模糊和縮放。
測試圖片如圖5 ~圖7 所示。每組圖中,第一張圖為基準圖,后續(xù)圖片為相對原圖發(fā)生旋轉(zhuǎn)、模糊以及縮放等變化的圖片。因為每組圖片較多,圖中所示僅為部分圖片,以作示意。圖8 ~圖10 為測試結(jié)果,其中,實線表示本文改進SURF 算法的測試結(jié)果。
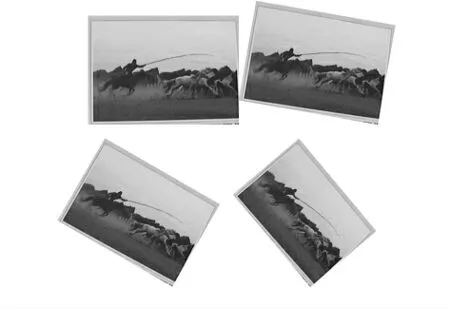
圖5 旋轉(zhuǎn)測試圖片F(xiàn)ig 5 Images of rotation test
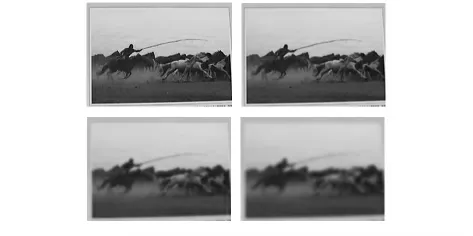
圖6 模糊測試圖片F(xiàn)ig 6 Images of blur test

圖7 尺度變化測試圖片F(xiàn)ig 7 Images of scale variation test

圖8 旋轉(zhuǎn)圖像匹配比較Fig 8 Matching comparison of rotation images
圖5 為對旋轉(zhuǎn)不變性進行測試所用的圖片,測試圖片旋轉(zhuǎn)角度分別為 10°,20°,直到 80°。從圖 8 中可見 2 種算法都出現(xiàn)了旋轉(zhuǎn)角度變大時,匹配點數(shù)反而增加的情況。這說明所謂旋轉(zhuǎn)不變并不是完全不受旋轉(zhuǎn)影響。通過對SURF 特征算子提取過程,以及隨圖片旋轉(zhuǎn),特征點數(shù)量發(fā)生變化的情況進行分析可以發(fā)現(xiàn),SURF 算法的旋轉(zhuǎn)不變性體現(xiàn)在描述子生成階段,而在 SURF 特征點[6,7]檢測階段仍然受到旋轉(zhuǎn)影響,即旋轉(zhuǎn)有可能影響某一像素點是否是SURF 特征點,同時也可能影響SURF 特征點的尺度。因此會造成隨旋轉(zhuǎn)角度不同,特征點匹配數(shù)目發(fā)生變化的情況,從而間接影響了旋轉(zhuǎn)圖像中特征點的匹配數(shù)目。
對比2 種算子的匹配點數(shù),可看到改進SURF 的性能在旋轉(zhuǎn)角度小于40°時匹配效果和SURF 算法接近,但隨旋轉(zhuǎn)角進一步變大,改進SURF 的效果較經(jīng)典SURF 算法略差。這說明在相同匹配準則下,三角算子和對角線算子構(gòu)建的SURF 特征描述子對旋轉(zhuǎn)圖像的區(qū)分能力略低于經(jīng)典SURF 特征描述子。
對比圖8 中的匹配準確率,可見兩者的匹配準確率基本相當。
圖9 為對模糊圖片進行特征點匹配的匹配結(jié)果。可以看到,隨著模糊程度的加深,2 種特征描述子的匹配點數(shù)均發(fā)生下降,匹配準確率也發(fā)生下降。對比2 種特征描述子匹配的具體數(shù)據(jù)可見,改進的SURF 特征描述子不論在匹配點數(shù)和匹配精度方面均顯著高于經(jīng)典SURF 特征描述子。經(jīng)典SURF 特征描述子基于Haar 小波構(gòu)建,Haar 小波體現(xiàn)了像素的邊緣特征,而隨著模糊程度加深,圖像的邊緣特征逐漸變得不明顯。因此,經(jīng)典SURF 算子性能出現(xiàn)了下降,而改進的SURF 算子中的三角和對角線特征,主要體現(xiàn)了特征點鄰域子窗口的整體特征,受局部像素點邊緣模糊影響較小,性能下降程度要小于經(jīng)典SURF 算子。
圖10 為對尺度變化進行測試的結(jié)果,從圖中可以看到,改進的SURF 算子匹配點數(shù)略低于經(jīng)典算子,而匹配準確率則與經(jīng)典算子十分接近。這說明雖然改進的SURF 特征描述子對尺度變化特征的區(qū)分能力略有下降,但是仍然保留了尺度不變性的特點。

圖9 模糊圖像匹配比較Fig 9 Matching comparison of blur images

圖10 尺度變化圖像匹配比較Fig 10 Matching comparison of scale variation images
3.2 計算復雜度測試
本文對SURF 算子的改進主要目的是嵌入式應用,因此,將SURF 算子和改進的SURF 算子計算移植到主頻為1GHz 的TMS320C6416 處理器中實現(xiàn),采用相同的優(yōu)化策略,以比較改進算法和經(jīng)典算法的運行速度。測試過程對相同視頻圖像求SURF 特征點,并計算特征點的特征描述子,實驗過程中將特征點數(shù)量設定為60 個。測試結(jié)果表明:改進SURF 算法實現(xiàn)了28f/s 的運算速度,而標準SURF算法運算速度約為19f/s。采用三角特征和對角特征對SURF 算法進行改進后,運算速度提高了約47%。
從3.1,3.2 小節(jié)的測試結(jié)果來看,改進SURF 特征描述子保留了經(jīng)典SURF 特征描述子的旋轉(zhuǎn)、尺度不變性,對模糊圖像魯棒性增強,運算速度有了顯著提升,比經(jīng)典SURF特征描述子更適合嵌入式系統(tǒng)應用。
4 目標跟蹤應用實驗
為了驗證改進的SURF 特征描述子實際應用效果,基于SURF 特征點匹配設計了目標跟蹤策略,以驗證改進SURF 特征描述子在目標跟蹤中的應用效果。
手動控制波門鎖定跟蹤區(qū)域,然后控制目標區(qū)域移動,移動包括平移、旋轉(zhuǎn)以及視角變化等。跟蹤過程視頻截圖如圖11、圖12 所示。

圖11 改進的SURF 特征描述子跟蹤試驗1Fig 11 Tracking test 1 for improved SURF feature descriptor

圖12 改進的SURF 特征描述子跟蹤試驗2Fig 12 Tracking test 2 for improved SURF feature descriptor
圖11 中目標在移動過程中發(fā)生了角度旋轉(zhuǎn)和比較嚴重的模糊,但是跟蹤波門始終鎖定在正確的位置上,實現(xiàn)了在目標快速移動中的跟蹤功能。充分證明了改進算子在圖像旋轉(zhuǎn)和模糊情況下的魯棒性。
圖12 中目標首先發(fā)生了角度旋轉(zhuǎn),到第716 幀時和初始情況相比,目標旋轉(zhuǎn)角度、視角、尺度均發(fā)生了較大變化,第850 幀目標在尺度上又回到和第一幀接近的狀態(tài),但是仍然存在旋轉(zhuǎn)角度的差異。整個過程波門始終鎖定在正確位置上,證明了算子在目標旋轉(zhuǎn)和尺度發(fā)生變化情況下的有效性。
5 結(jié)束語
針對SURF 特征描述子運算復雜,難于滿足嵌入式系統(tǒng)實時運算要求的不足,對SURF 特征描述子提取算法進行了改進。利用三角特征和對角線特征設計了新的SURF特征描述子。對2 種算子的匹配性能和運行速度進行了對比分析,充分討論了改進SURF 特征描述子的優(yōu)勢和不足。利用改進的SURF 特征描述子設計了目標跟蹤算法,通過實驗驗證了改進SURF 特征描述子在目標跟蹤應用中的有效性。
[1] Miao Quan,Wang Guijin,Shi Chenbo.A new framework for online object tracking based on SURF[J].Pattern Recognition Letters,2011,31:1564 -1571.
[2] 周志強,汪 渤.尺度不變特征在自主尋的電視制導中的應用[J].電光與控制,2009,16(9):6 -8.
[3] 王永明,王貴錦.圖像局部不變特征與描述[M].北京:國防工業(yè)出版社,2010.
[4] Mikolajczyk K,Schmid C.A performance evaluation of local descriptors[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10):1615 -1630.
[5] Lowe D G.Object recognition from local scale-invariant features[C]∥Proceedings of the International Conference on Computer Vision,Corfu,Greece,1999:1150 -1157.
[6] Herbert Bay,Tinne Tuytelaars,Luc Van Gool.SURF:Speeded up robust features[C]∥Lecture Notes in Computer Science,Graze:ECCV,2006:404 - 417.
[7] Herbert Bay,Andreas Ess,Tinne Tuytelaars,et al.Speed-up robust features(SURF)[J].Computer Vision and Image Understanding,2008,110(3):346 -359.
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數(shù)理化(高中版.高考數(shù)學)(2022年3期)2022-04-26 14:04:16
數(shù)學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38