太陽能自動跟蹤機器人
2012-04-20 09:31:10費敏毛麗民張笠君陸郁民
常熟理工學院學報 2012年4期
關鍵詞:單片機
費敏,毛麗民,張笠君,陸郁民
(常熟理工學院電器與自動化工程學院,江蘇常熟 215500)
太陽能自動跟蹤機器人
費敏,毛麗民,張笠君,陸郁民
(常熟理工學院電器與自動化工程學院,江蘇常熟 215500)
提出一種基于AT89S52單片機的雙軸太陽能自動跟蹤機器人的設計方法,以跟蹤傳感器為跟蹤元件,判斷太陽能電池板是否與太陽光垂直,同時通過控制系統對雙軸跟蹤裝置進行調整.實驗表明該機器人運行穩定,跟蹤效率高,具有較高的實用價值.
太陽能;雙軸跟蹤;機器人
在現有的能源結構中,主要是石油,天然氣,煤炭等化石能源.然而,這些能源都是不可再生能源.并且這些能源的資源也非常有限[1].面對有限的能源和人類對能源的無限需求,人們開始探尋可替代當前能源的新型能源.太陽能無疑是一種環保、綠色的能源,而且它是巨量的、可再生的能源.太陽能板的發電效率與太陽光照射到太陽能板的角度有關[2].在發電過程中,若太陽能板實時與太陽光保持垂直的角度,則能較大地提高發電效率[3].本文設計了基于AT89S52單片機的雙軸自動跟蹤太陽能機器人.
1 太陽跟蹤系統設計
1.1 太陽能跟蹤方案設計
太陽能跟蹤機器人如圖1所示,系統采用步進電機作為太陽能電池驅動機構,與其它類型電機相比具有容易實現精確開環控制,無積累誤差等優點.太陽能跟蹤控制裝置有兩個自由度,兩個步進電機分別控制著太陽能電池板在水平和垂直方向上的轉動.太陽能跟蹤裝置依靠水平方向的轉動實現太陽方位角的跟蹤,垂直方向的轉動實現太陽高度角的跟蹤.太陽能電池板與過充過放保護電路連接.蓄電池給單片機、步進電機供電,單片機控制機器人的運動方向,實現太陽能最大功率的跟蹤.
1.2 太陽跟蹤裝置設計
目前國內使用較為廣泛的是單軸跟蹤裝置,單軸跟蹤裝置只能控制水平方位,俯仰方位則固定一個角度(-23.5°到23.5°之間[4]).這種裝置的結構比較簡單,但是不能始終與太陽光保持垂直,也就不能獲得最大的發電功率.本文設計的太陽跟蹤裝置設計如圖2所示.裝置采用雙軸跟蹤方式,能夠在太陽高度和方位的變化上都跟蹤太陽,在工作時該系統根據太陽光的入射角度控制電機的運動,從而達到太陽能板與太陽光始終垂直.這種跟蹤系統的特點是跟蹤精度高,支撐結構的設計比較容易[5].
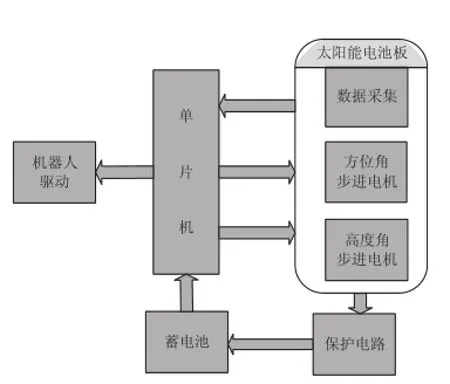
圖1 太陽能跟蹤機器人示意圖

圖2 機器人雙軸跟蹤裝置示意圖
2 太陽跟蹤系統的硬件設計
2.1 單片機最小系統設計
本系統采用的是51系列單片機.51單片機價格低廉,性能穩定,抗干擾能力強,是開發低端產品的首選.它具有豐富的內部資源,較大的數據、程序存儲區.本系統使用AT89S52單片機來實現整個系統的控制.系統工作所需外圍電路包括:電源、復位電路及晶振電路,如圖3所示.
2.2 跟蹤傳感器的數據采集電路設計
如圖4所示,本數據采集電路由雙運放LM324與R1、R2構成兩個電壓比較器,參考電壓為VDD(12 V)的1/2.光敏電阻RT1、RT2與電位器RP1和光敏電阻RT3、RT4與電位器RP2分別構成光敏傳感電路,該電路的特殊之處在于能根據環境光線的強弱進行自動補償.將RT1和RT3安裝在垂直遮陽板的一側,RT4和RT2安裝在另一側.當RT1、RT2、RT3和RT4同時受環境自然光作用時,RP1和RP2的中心點電壓不變.如果只有RT1、RT3受太陽光照射,RT1的內阻減小,LM324的3腳電位升高,1腳輸出高電平.同理,如果只有RT2、RT4受太陽光照射,7腳輸出高電平.這部分主要功能就是采集信號并轉換成數字信號,然后送入單片機,由單片機作進一步處理.
2.3 蓄電池過充過放保護電路設計
鉛蓄電池如果放電過度,將使硫酸鉛晶體增大,這不僅增加了極板的電阻,而且在充電時很難使它再還原,直接影響蓄電池的容量和壽命[6].蓄電池過充過放保護電路如圖5所示.
蓄電池保護電路分欠電壓保護和充電保護電路兩部分.當蓄電池電壓在9 V以上時,VZ1擊穿導通,A點電壓為正,VT1反向截止,VT2導通,電流經C2觸發V1導通,蓄電池正常輸出電壓,發光二極管LED1熄滅,發光二極管LED2發光,作電池電壓正常指示.當蓄電池電壓下降到9 V時,VZ1截止,A點電壓為負,VT1正向導通,C2正極所充電荷經V2加于V1陰極,使V1陰極瞬間加上反向電壓而截止,輸出端無電壓輸出,發光二極管LED2熄滅,發光二極管LEDI發光,指示電池電壓不足,實現了蓄電池的保護.
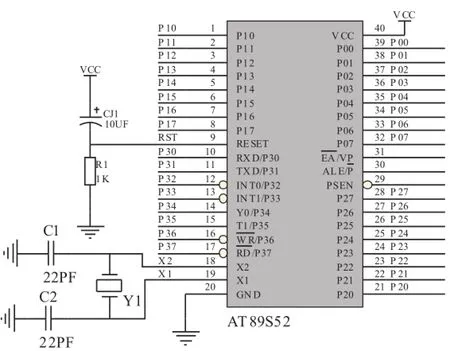
圖3 單片機系統電路圖

圖4 數據采集電路原理圖
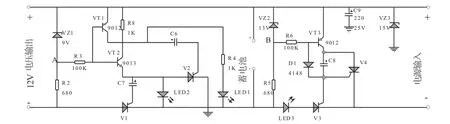
圖5 蓄電池過充過放保護電路原理圖
當蓄電池電壓達到13.5 V左右時,VZ2擊穿導通,B點電位為正,VT3反向截止,VD1導通,并觸發V4導通.C3正極在原先VT3導通時所充電荷經V4加于V3陰極,使V3瞬時加上反向電壓而截止,關斷充電電源.同時充電指示燈LED3停止發光,而電壓正常指示燈LED2卻正常發光.當電池電壓低于或等于13 V時,VZ2截止,VT3正偏導通,電流經C3觸發V3導通,充電回路又連通,同時C3也被充電.

圖6 太陽能跟蹤機器人系統流程圖
3 太陽跟蹤系統軟件設計
機器人在運動過程中,照射到太陽板電池的角度發生變化,太陽能跟蹤控制裝置有兩個自由度,通過控制方位角步進電機控制著太陽能電池板在水平方向上轉動,通過控制高度角步進電機控制太陽能電池板垂直方向的轉動.使太陽能電池板自動正對太陽光,提高太陽能的利用效率.其系統流程圖如圖6所示.
4 調試
太陽跟蹤指的是在太陽照射過程中受光面跟太陽光線始終趨于垂直,以在有限的使用面積內收集更多的太陽能[7].除了提高太陽光電池本身的轉換效率和提高蓄電池充放電效率外,太陽跟蹤是太陽光伏發電系統中另一種提高轉換效率的有效手段.實驗表明精確的太陽跟蹤可使太陽能利用率大大提高.
圖中α為太陽板電池與太陽光的角度.由圖可得相同的外界情況下,α越大,太陽板電池越正對太陽光,太陽能輸出功率越大,因此增大光伏電池的光照強度就可以增大光伏電池的輸出效率.由圖可以看出太陽光的光照強度不同時,太陽能電池的輸出特性有較大的改變.
5 結束語
本文設計的太陽能自動跟蹤機器人能夠追蹤太陽方位角,使光伏發電系統獲得最大輸出功率.本系統具有適用范圍廣、工作穩定可靠和免維護等優點,具有較為廣泛的應用前景.太陽能發電技術在新農村建設中的推廣應用,對于促進經濟社會可持續性發展和我國正在實施的節能減排都具有長遠的意義[2].
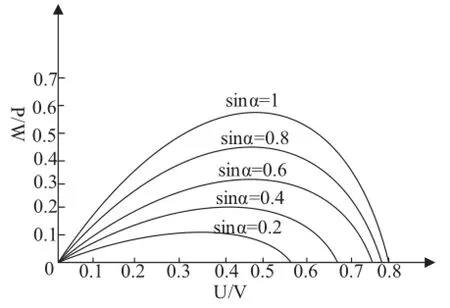
圖7 不同角度的太陽能電池功率特性曲線
[1]Sefa I,Dem irtas M,Colak I.App licat ion of one ax is sun track ingsystem[J].En ergy Convers ion and Managemen,2009,50(11): 2709-2718.
[2]王雪文.太陽能電池板自動跟蹤控制系統設計[J].西北大學學報(自然科學版),2004,34(2):163-164.
[3]帥麒,朱華.太陽能光伏組件在不同跟蹤方式下的發電量比較[J].中國高新技術企業,2009(4):136-137.
[4]饒鵬,孫勝利,葉虎勇.兩維程控太陽跟蹤器控制系統的研制[J].控制工程,2004(5):542-543.
[5]馬健,向平.高精度太陽位置算法及太陽能發電中的應用[J].新技術新工藝,2008.
[6]Shen Chao,He Yaling,LiuY inwen,et al.M odell ing and s imu lation ofsolar radiat ion data p rocess ing with S imu link[J].Simulat ion Modelling P ractice and Theory,2008,16(7):721-735.
[7]劉四洋,伍春生.主動式雙軸太陽跟蹤控制器[J].可再生能源,2007,25(6):69-72.
The Design of the Solar Automatic Tracking Robot
FEI Min,MAO Li-min,ZHANG Li-jun,LU Yu-min
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
This paper presents a microcontroller AT89S52-based dual-axis solar tracking robot design methodology by making full and efficient use of solar energy.The method is based on tracking sensor for tracking components, judging whether the solar panels are vertical to sunlight,and at the same time the panels can be adjusted by the control system dual-axis tracking device.The experiments show that the robot is running stably,that the tracking efficiency is relatively high,and that it has a high practical value.
solar energy;dual-axis tracking;robot
TP23
B
1008-2794(2012)04-0069-04
2012-03-16
校青年教師科研啟動項目“粒子濾波算法在FPGA中的研究”(QZ1101);江蘇省大學生實踐創新訓練計劃項目“太陽能自動跟蹤機器人的設計”(S1135)
費敏(1989—),男,江蘇靖江人,常熟理工學院電氣與自動化工程學院2008級學生.
毛麗民(1981—),男,江蘇常熟人,講師,碩士,研究方向:機器人與目標跟蹤研究.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
