全尺寸柵格舵鉸鏈力矩天平研制
2012-04-17 10:35:24陳建中易國慶譚顯慧
實驗流體力學 2012年1期
陳建中,易國慶,彭 超,譚顯慧
(1.北京航空航天大學航空科學與工程學院,北京 100191;2.中國空氣動力研究與發展中心,四川綿陽621000)
0 引 言
格柵舵是由外部框架和內部眾多的薄格壁布置成框架形式或蜂窩形式的空間多升力面系統,見圖1。作為一種新型的氣動控制舵面,在中國自主研制的飛行器中的應用尚屬空白,對其氣動性能尤其是舵控系統操縱性能的認識缺乏工程實用經驗。為研究某飛行器帶控制系統全尺寸柵格舵的氣動特性,評估舵控系統性能,氣動中心在FL-24(1.2m×1.2m)風洞構建了單獨柵格舵全尺寸模型帶控制系統試驗平臺,并開展了相應試驗技術研究。法向力大,鉸鏈力矩小是柵格舵模型載荷的一大特點,開展高速風洞試驗研究的瓶頸在于研制高靈敏度氣動測試天平[1]。
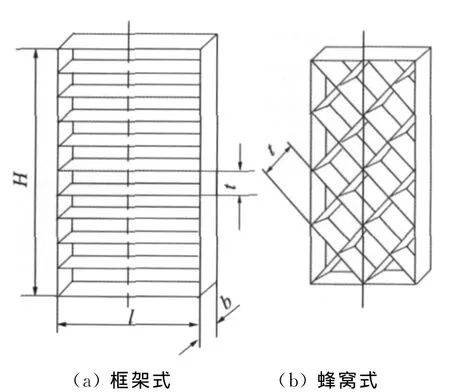
圖1 格柵翼的兩種形式Fig.1 Two styles of grid fin
1 天平設計方案
1.1 天平支撐方案及載荷匹配要求
柵格舵模型展向尺寸比較大,且需要連接舵控系統,在風洞中只能采用風洞側壁支撐方式,見圖2。受風洞駐室空間限制,天平的設計總長只能做到350mm左右。根據模型最大載荷估算,在M=0.4~3.0條件下,模型法向力與其余各氣動分量的比值見表1。按照常規高速風洞天平載荷匹配指標要求[2],在這樣有限長度范圍內設計該天平的難度非常大。為確保風洞試驗安全,滿足天平的強度、剛度校核要求,不得不適量放大天平Mx匹配載荷,最終確定的天平設計載荷指標見表2。
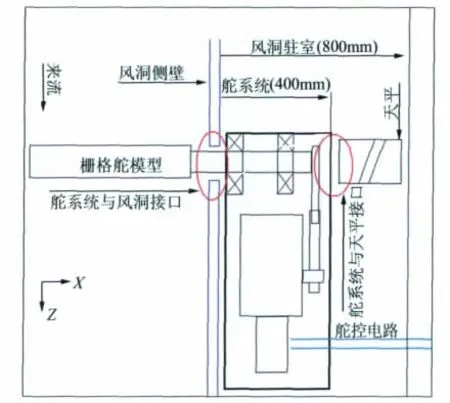
圖2 天平及模型支撐系統示意圖Fig.2 The sketch of balance and model support system

表1 模型匹配載荷Table 1 Matching loads of the model

表2 設計載荷(單位:N、N·m)Table 2 Design loads(Units:N、N·m)
1.2 天平結構設計
對高速風洞常規應變天平而言,常規天平的長度與直徑之比一般為6~10[3]。為縮短天平總長,增加元件布置空間,在天平的兩個端面采用了法蘭盤代替傳統的錐連接方式,最終確定的長度為350mm。同時,為了增加強度要求,天平直徑必須加大,通過有限元分析發現,天平直徑須做到260mm。在元件的布置上,為保證各元有足夠的空間,同時兼顧天平的強度、剛度和靈敏度,采用了元件串聯結構,這種布局的優點在于每個元件段互不干涉,獨立承擔和傳遞全部載荷,同時,通過調節各元件段之間的等直段長度,盡量減小了天平各元件段之間的相互干擾,容易獲得較高的靈敏度。
針對法向力Y,軸向力Z,在元件設計中采用了“工”梁放大結構,盡量提高這兩個元的靈敏度;針對鉸鏈力矩Mx,在元件的設計中采用了“三片梁”結構,中間梁主要承受天平的全部載荷,通過調節兩側的測量梁可以在本身強度變化很小的情況下讓Mx的應變量實現最大。最終完成的天平設計數模見圖3。
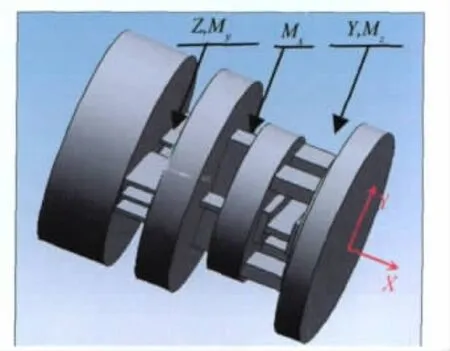
圖3 天平結構布局示意圖Fig.3 The sketch of balance structure
2 元件靈敏度分析
利用ANSYS與UGII的幾何接口,將幾何模型導入ANSYS,劃分網格,并在天平校心位置,分別加載表2所列載荷,得到天平各元件貼片表面的應變云圖,如圖4所示,各元應變計中心處的應變如表3所示。由圖4及表3可見,Y、Mz及My的應變輸出最大,Z和Mx輸出相對較小,根據以往天平設計經驗,此種天平元件靈敏度輸出,能夠分辨出模型氣動力結果。
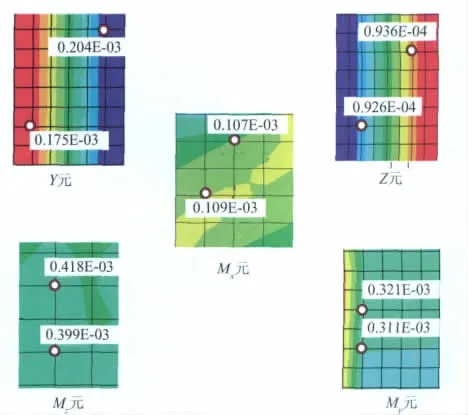
圖4 天平各元件靈敏度分析結果Fig.4 Every element of balance sensitivity analyzed result

表3 天平各元平均應變Table 3 Average strain of balance
3 強度校核分析
天平材料采用00Ni18Co8Mo5TiAl(工程上稱F141),由于模型載荷比較特殊,為確保試驗的安全,選擇了M=0.9~3.0的載荷進行了分段強度校核。圖5給出了典型M數載荷有限元分析結果。可以看出最大應力點出現在測量Mz的大梁根部,表4給出了各M數下的強度校核結果。其中最小安全系數也在8以上,滿足試驗的強度要求。
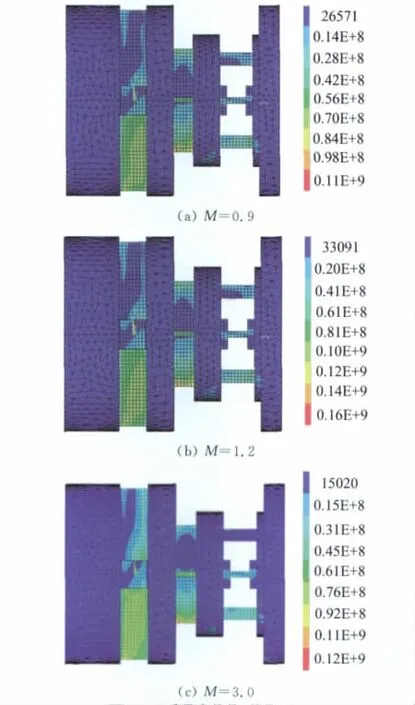
圖5 天平強度校核(單位:MPa)Fig.5 Intensity of the balance

表4 天平強度校核結果Table 4 Intensity strain of balance
4 粘貼、校準與電磁屏蔽措施
天平各分量均選擇ZF1000-4AA(11)-X型號的常溫應變計組成惠斯頓電橋,該電橋具有靈敏度高、測量范圍寬、電路結構簡單、測量精度高等優點。各電橋均采用精密直流穩壓電源供電,粘貼電橋圖見圖6。靜校坐標系為地軸系,校準方法同常規,靜校結果見表5,各項靜校指標合格。為避免舵機電磁干擾,采用了在天平外圍包薄銅皮,以及在天平輸出線和舵機控制線包錫箔紙,充分接地等措施,見圖7。試驗結果顯示,該屏蔽措施效果良好。
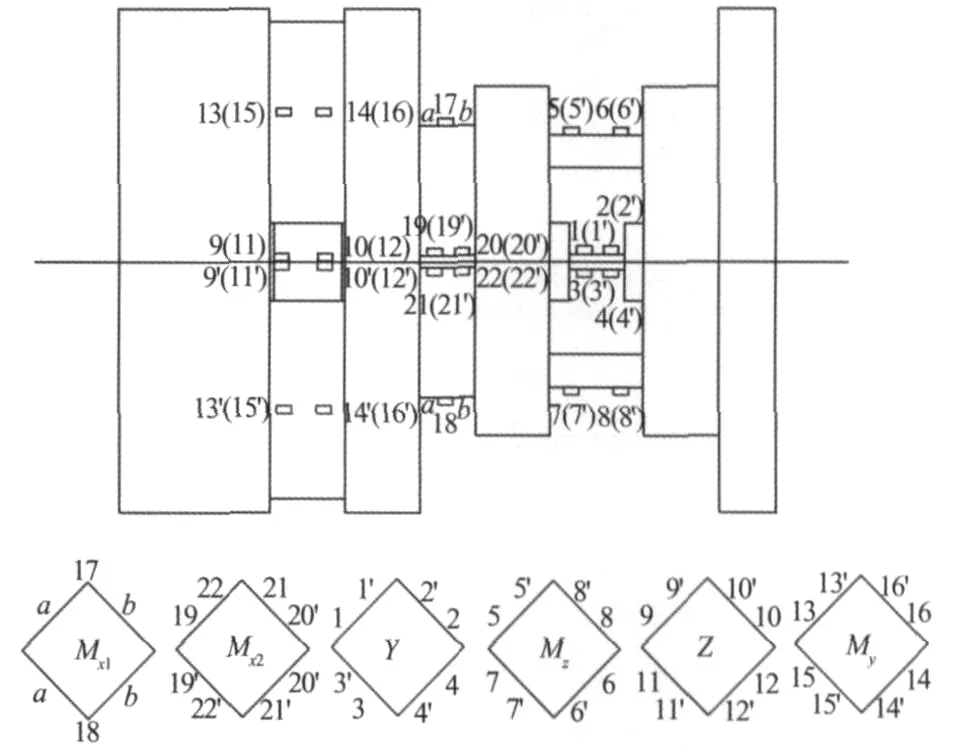
圖6 天平應變計粘貼位置圖Fig.6 Strain gauge of balance sticking position

表5 天平靜校性能指標Table 5 Balance static calibration index
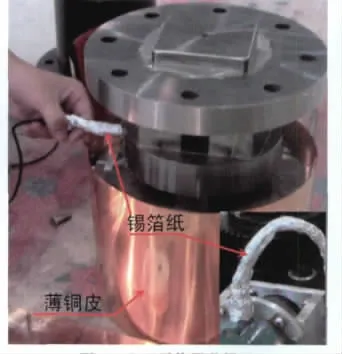
圖7 電磁干擾屏蔽措施Fig.7 Electromagnetic interfering shield step
5 典型試驗結果
圖8給出了M=0.7,模型法向力系數靜、動態測試結果對比曲線。由圖可見,模型法向力系數隨迎角(振幅)變化規律合理,靜、動態結果的一致性較好,說明天平在不同工況下,工作狀態正常,測試結果可信。
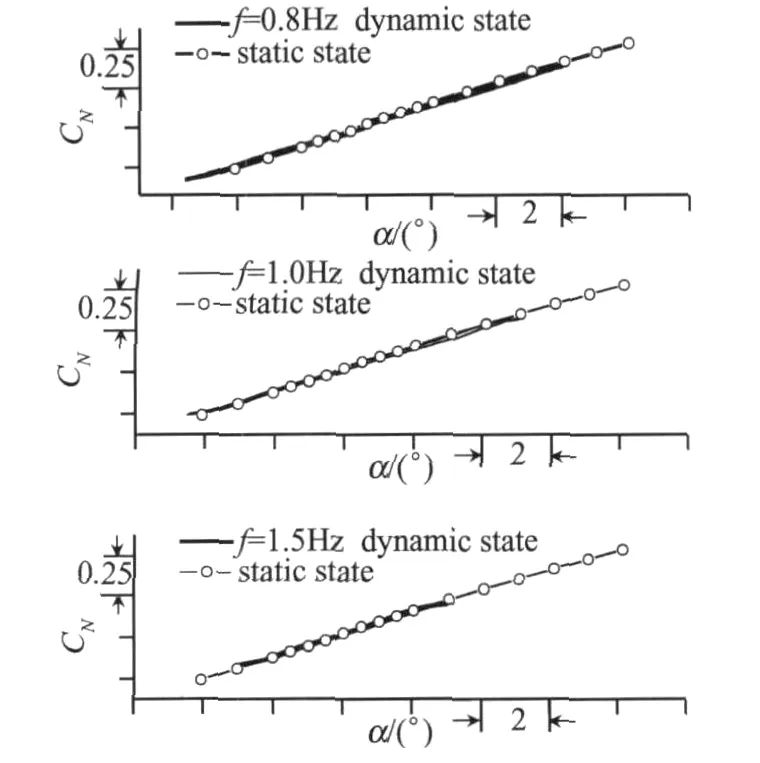
圖8 模型法向力系數靜、動態測試結果曲線(M=0.7)Fig.8 Normal force coefficient curves of the model with static and dynamic state(M=0.7)
圖9,10給出了M=0.7,振幅A=4°,8°時,不同頻率f條件下,模型鉸鏈力矩系數Mx、舵控信號UK、舵機軸電位計反饋信號Uf1以及模型軸電位計反饋信號Uf2的時間歷程曲線(圖中,Δ為Mx單位)。從圖中可以看出,Mx與Uf2的峰值信號對應一致,說明模型動態氣動滯后現象非常弱,同時也說明天平的動態響應能力足夠;從Mx變化規律還可以看出,天平靈敏度和抗電磁干擾的能力良好。
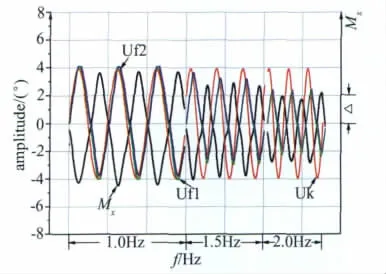
圖9 Uk,Uf1,Uf2,Mx隨f變化曲線(A=4°,M=0.7)Fig.9 Uk,Uf1,Uf2and Mxcurves with f transformation(A=4°,M=0.7)
6 結 論
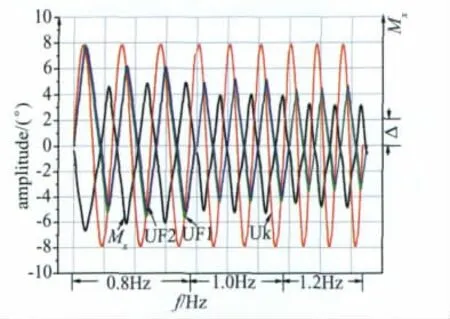
圖10 Uk,Uf1,Uf2,Mx隨f變化曲線(A=8°,M=0.7)Fig.10 Uk,Uf1,Uf2and Mxcurves with f transformation(A=8°,M=0.7)
由于該天平研制之前并無先例,加之模型載荷不匹配,天平尺寸軸向徑向受到試驗段空間限制,開展相應的設計技術研究十分必要。經地面靜態校準和風洞試驗,證明該天平的研制是成功的:
(1)天平結構設計合理。法蘭盤代替傳統的錐連接方式,有效縮短了天平長度;串聯結構的元件布局形式,既減小了天平各元之間的相互干擾,又便于進行提高個別元的測量靈敏度設計;
(2)適量放寬模型估算載荷對天平設計載荷指標的要求,有利于試驗方案的順利進行,同時,通過試驗過程證明這樣并不影響測量結果的可信度;
(3)天平靜態校準結果及風洞動、靜態試驗結果顯示,天平性能良好,滿足高速風洞柵格舵氣動特性測試需求。
[1] C.M.貝洛齊爾科夫斯基,Л.A.奧德諾弗爾,Ю.З.薩芬,等.李鶴清譯.柵格翼[R].中國運載火箭技術研究院第一設計部,1994.
[2] 陳德華,李曉華,彭云.彈射救生系統大迎角大側滑角天平設計研究[J].實驗流體力學,2005,19(1):66-70.
[3] 施洪昌.高低速風洞測量與控制系統設計[M].北京:國防工業出版社,2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03