可重構模塊化教學機器人設計
2012-03-30 08:57:58金安成路敦民梁志強莊偉斌
森林工程 2012年6期
金安成,路敦民,李 彬,梁志強,莊偉斌
(北京林業大學工學院,北京100083)
隨著網絡與集成技術的迅速發展,機器人除在制造業、農業、醫療等方面得到越來越多廣泛應用外,已開始滲透到人們生活的各個方面,因此導致機器人技術與相關方面人才的需要迅速增加,而教學機器人作為這種先進技術的實物載體,在教學中的位置也越來越重要[1]。教學機器人是一種適合大中專學生的具有開放式特征的實訓實驗平臺,是多種高科技的融合。
模塊化機器人恰恰符合教學機器人的要求。模塊化機器人系統是由一套具有不同尺寸和性能特征的模塊組成的,通過這些模塊能快速裝配出最適用于完成給定任務的機器人[2-4]。
現已有博創科技、森漢科技、中山大谷、北京智能佳等多家公司在制作和生產模塊化機器人,可以達到簡單地拼接成不同類型并通過控制可完成不同任務的機器人。但這些以效益為主的公司所研制和生產的產品存在許多弊端,并不匹配于教學。
(1)機器人這種新興產品所面向消費者必是中高消費人群,故其價格較高,不適合于成百套地購買用于教學[5]。
(2)現階段各公司的產品多是以娛樂玩具、生活幫手等固定式、局限性的特征立于市場抓住消費者眼球,比如一套套件只能做一個會跳舞的機器人,沒有深度開發的潛質,對教學來說沒有意義。
(3)套件的材質,由于研發的出發點就是以玩具類為主題,所以現階段機器人的模塊材質多以塑料為主,比如博創科技的第一代以及第二代產品的模塊都是用塑料生產而成,因為塑料的強度及剛度都遠小于金屬,這就造成了舵機連接件變形大,抗扭矩小等缺點,無法搭建多關節機械臂。
(4)產品的結構設計,對比多公司的產品發現,各公司的機器人模塊型式都大同小異,綜合特點就是型式太單一,造成自由度小,無法搭建可以完成更加復雜任務的各種機器人。
綜上所述,想要讓模塊機器人作為教學套件,一是選好舵機,二就是設計好舵機連接架。
1 模塊化套件設計
1.1 模塊設計準則
機器人套件是典型的機電一體化產品[6],在進行模塊化設計時,要考慮到實現各模塊的標準化、通用化、規格化,使其具有互換性、相關性[7],同時也要考慮到機器人整個系統的強度、剛度等問題[8]。因此,模塊設計應遵循以下準則:
(1)具有相對獨立的特定功能。根據所要實現的功能,恰當地確定模塊的數量和大小,要是模塊間的相互作用最小,從而使模塊功能獨立性最大。
(2)具有互換性。相同模塊在結構和功能上應具有互換性;而性能和結構各異而功能相同的模塊也應能互換使用,以便設計出系列化產品。
(3)具有通用性。模塊不僅實現橫系列、總系列通用,而且實現跨系列通用,并且通用模塊間機械、電氣接口要盡量簡單,以便套件的安裝、調試和維修。
(4)具有良好的經濟性。模塊組合時,應使所構成的結構具有明確的目的性、較大的靈活性和良好的經濟性。
1.2 模塊設計內容
(1)選擇合適的舵機,用以配備教學模塊機器人套件,使其有更多的自由度,可以完成更多的教學項目。
(2)舵機連接件的設計[9],使其可以和舵機緊固連接并保證剛度和強度的要求,可實現多種自由度,達到拼接更加靈活的關節的目的。
(3)除舵機連接件之外的一些中心連接件(如圓形舵盤、一字舵盤)、輔助件的設計,使該套件可以搭建更多類型的機器人,更大程度地開拓使用者的思維[10]。
1.3 模塊化結構設計
1.3.1 標準模塊設計
(1)舵機架
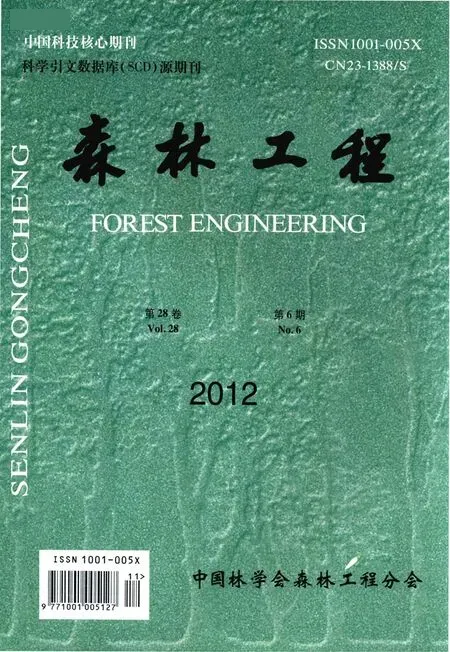
舵機架結構相同,通過增加零件 (小舵機連接板),可使現有舵機架可容納MG995及SMS8166M兩種大小不同的舵機,更體現模塊化這一特點——通用性[11]。
當連接大舵機時,如圖1所示,不用安裝兩個小連接片,直接把大舵機連接其上;當要連接小舵機時,如圖2所示,通過兩個連接片,使小舵機也可以連接其上,達到了大小通用的效果。
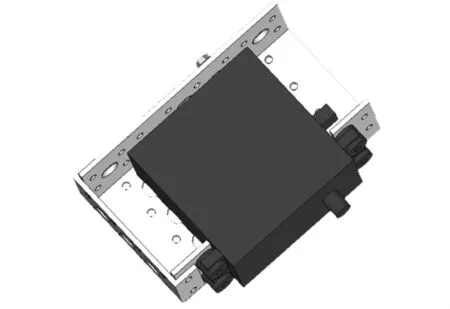
圖1 航機架連接大舵機Fig.1 Navigation frame connected with big steering gear
圖2 航機架連接小舵機Fig.2 Navigation frame connected with small stearing gear
(2)“U”型件
U型件 (如圖3所示)是舵機傳遞運動的構件[12],在舵機架上安裝一法蘭軸承,使舵機傳輸動作的“U”型件一邊連于舵盤,一邊連于軸承,使其連接更穩定,當懸臂較長時,不會出現手臂不穩的現象,很好地解決了現有設備U型件的連接問題。U型件與舵機架的設計尺寸緊密相連,因為舵機有大小兩種舵機,故U型件的設計也要適合兩種舵機。

圖3 U型件Fig.3 U-shaped componert
當安裝上兩種舵機后,所需U型架的尺寸相差很小,可設計固定尺寸的U型架,正適合大舵機連接,當連接小舵機時,采取在舵機架底部法蘭軸承下墊螺母的方法來解決問題。如圖4和圖5所示。

圖4 連接大舵機Fig.4 Connected with big steering gear
圖5 連接小舵機Fig.5 Connected with small steering gear
(3)機械臂旋轉模塊
如圖6所示,通過一個大小合適的推力軸承解決了機械手在底盤旋轉的問題,不再像現有套件機械臂受力都加載于舵盤及舵機軸上,使其受力承載于軸承上,使整個機械臂的基體更穩定。
(4)機械手爪模塊
拋棄市面現有的整體機械爪,圖7中自行設計的機械爪抓取范圍大,使機械爪整體連接穩定,不會出現抓取水杯等重物時使舵機受力較大的現象。
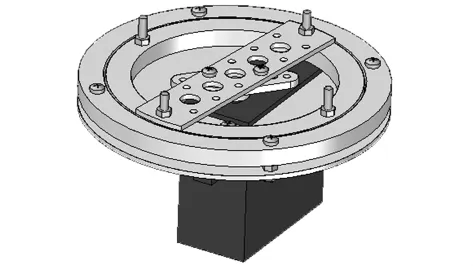
圖6 機械臂旋轉Fig.6 Rotation of the mechanical arm
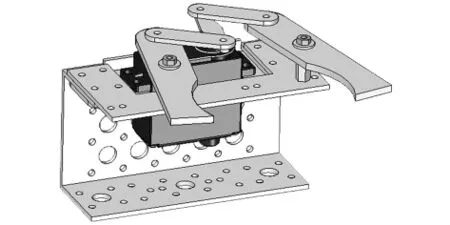
圖7 機械抓Fig.7 Mechanical grip
(5)舵機選擇
大舵機選擇為春天SM-S8166M型模擬舵機,該舵機輸出扭矩為33 kg-cm,且舵機底部為平底,無塑料軸,適合所設計的舵機架。在小舵機方面,選擇MG995通用型舵機,其尺寸為現在市場上最通用的,其各種配件也很齊全[13]。
1.3.2 可重構機器人裝配效果圖
可重構機器人裝配效果如圖8和圖9的示。
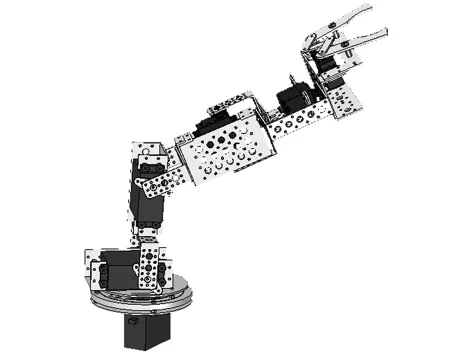
圖8 機械手臂Fig.8 Mechanical arm
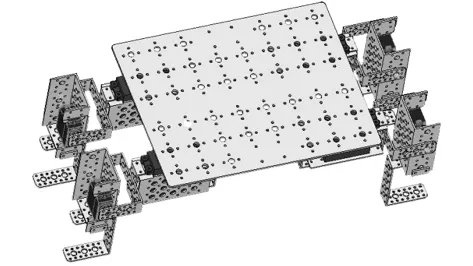
圖9 爬蟲式機器人Fig.9 Crawler type robot
2 結論
本文提出了可重構模塊化教學機器人的零件設計、材料選取及可重構實現方法,不僅解決了當前市場上教學機器人價格高昂、易損壞、可重構性差等問題,而且開發了一套易于學生搭建、功能強大、通用性強、制造簡單、成本低廉、便于拆卸的機器人模塊,利于學生對機器人各個基本機構原理的理解,為廣大大中專學生提供了具有開放式特征的實訓實驗平臺,激發了學生對機器人知識的濃厚興趣和熱情。
[1]濮良貴,紀名剛.機械設計[M].北京:高等教育出版社,2001.
[2]成大先.機械工程手冊:機械設計(二)[M].北京:機械工業出版社,1982.
[3]郭衛東.機械原理[M].北京:科學出版社,2010.
[4]辛 穎,薛 偉,楊鐵濱,等.楚魚創意組合模型在機器人林木實驗教學中的實踐與應用[J].森林工程,2012,28(1):81 -84.
[5]蔡自興.機器人學[M].北京:清華大學出版社,2000.
[6]張立勛,王 亮.機電一體化系統設計[M].北京:高等教育出版社,2007.
[7]加藤一郎.機械手圖冊.上海:上海科學技術出版社,1979.
[8]鄺治全.可重構模塊化教學機器人之機身設計[D].廣州:廣東工程職業技術學院,2007.
[9]陶 曄.組合模塊化機器人機械手爪的設計研究[D].南京:東南大學,2004.
[10]日本機器人學會,宗光華譯.機器人技術手冊[M].北京:科學出版社,1996.
[11]劉思寧,陳 永,章文俊.模塊機器人及計算機輔助設計[J].機器人,1999,21(1):16 -22.
[12]陳 麗,王越超,李 斌,等.蛇形機器人研究現況與進展[J].機器人,2002,24(6):559 -563.
[13]劉 繄.自重構模塊化機器人重構規劃方法的研究[D].武漢:武漢理工大學,2009.
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
現代裝飾(2020年5期)2020-05-30 13:01:56
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(2017年4期)2017-06-21 06:29:50
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09