杠桿法在復(fù)合輪系教學(xué)上的應(yīng)用
2012-02-21 07:28:24李明圣
裝備制造技術(shù) 2012年11期
李明圣
(湛江師范學(xué)院物理科學(xué)與技術(shù)學(xué)院,廣東 湛江 524048)
在機(jī)械中,常用到由幾個(gè)基本周轉(zhuǎn)輪系或定軸輪系和周轉(zhuǎn)輪系組合而成的復(fù)合輪系。由于整個(gè)復(fù)合輪系不可能轉(zhuǎn)化成一個(gè)定軸輪系,所以不能只用一個(gè)公式來(lái)求解。計(jì)算復(fù)合輪系時(shí),首先必須將各個(gè)基本周轉(zhuǎn)輪系和定軸輪系區(qū)分開來(lái),然后分別列出方程式,最后聯(lián)立解出所要求的傳動(dòng)比[1]。但是對(duì)初學(xué)者來(lái)說(shuō),不易區(qū)分周轉(zhuǎn)輪系和定軸輪系,計(jì)算傳動(dòng)比過(guò)程也比較繁瑣。因此,本文從行星齒輪機(jī)構(gòu)的運(yùn)動(dòng)特性方程式出發(fā),介紹了一種對(duì)行星齒輪機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析的圖解方法-杠桿法,并應(yīng)用杠桿法對(duì)汽車自動(dòng)變速器中的典型行星齒輪機(jī)構(gòu)進(jìn)行傳動(dòng)比的分析。
1 行星齒輪機(jī)構(gòu)傳動(dòng)的一般規(guī)律
單級(jí)行星齒輪系的傳動(dòng)比計(jì)算可通過(guò)轉(zhuǎn)換將周轉(zhuǎn)輪系轉(zhuǎn)換成定軸輪系,然后按求解定軸輪系傳動(dòng)比的方法來(lái)計(jì)算,如公式(1)。并可得出單級(jí)行星齒輪系的傳動(dòng)比通用計(jì)算公式

根據(jù)能量守恒定律,三個(gè)元件(太陽(yáng)輪、齒圈、行星架)上輸入和輸出的功率的代數(shù)和應(yīng)等于零。得出單級(jí)行星齒輪機(jī)構(gòu)一般運(yùn)動(dòng)規(guī)律的特性方程式[2]:

其中:n1、n2、nH、κ1分別為太陽(yáng)輪轉(zhuǎn)速、齒圈轉(zhuǎn)速、行星架轉(zhuǎn)速和齒圈與太陽(yáng)輪的齒數(shù)比。
由于雙級(jí)行星齒輪機(jī)構(gòu)多一對(duì)行星輪外嚙合,因此公式(1)的負(fù)號(hào)變正號(hào),傳動(dòng)比的計(jì)算公式

雙級(jí)行星齒輪機(jī)構(gòu)一般運(yùn)動(dòng)規(guī)律的特性方程式:

有級(jí)變速的自動(dòng)變速器采用的行星齒輪傳動(dòng)是一種常嚙合傳動(dòng),其傳動(dòng)比變換可通過(guò)分離與接合離合器或制動(dòng)器而方便的實(shí)現(xiàn),而且通過(guò)增減行星排內(nèi)行星齒輪的數(shù)目、行星排的數(shù)目,改變排與排之間的排列組合以及構(gòu)件間的連接和控制方式,可以得到較為理想的傳動(dòng)比。傳動(dòng)比計(jì)算方法通常采用解方程法,即根據(jù)式(2)或式(4)列出各行星排三元一次聯(lián)立方程,確定方程中各轉(zhuǎn)速的關(guān)系,輸入、輸出元件以及各排中的共體元件。具體為:先解出轉(zhuǎn)速為0的(有制動(dòng))單排方程,解出以共體元件為主函數(shù)的方程;再以此方程代入另一方程中的共體元件,就可將雙聯(lián)方程變?yōu)橹挥休斎搿⑤敵鲛D(zhuǎn)速的單列方程;將輸入轉(zhuǎn)速放在等號(hào)左邊,輸出轉(zhuǎn)速放在等號(hào)右邊,解出輸入軸轉(zhuǎn)速和輸出軸轉(zhuǎn)速關(guān)系的方程,再除去轉(zhuǎn)速,即得到輸入軸與輸出軸的速比。這種算法對(duì)單排和雙排行星齒輪傳動(dòng)分析還比較簡(jiǎn)單,但分析多排行星齒輪傳動(dòng)時(shí)就比較困難了,特別是在判斷機(jī)構(gòu)可能實(shí)現(xiàn)的傳動(dòng)比數(shù)目、各基本構(gòu)件、行星輪的相對(duì)轉(zhuǎn)速及力學(xué)和動(dòng)力學(xué)問(wèn)題時(shí),非常困難。如果采用杠桿法進(jìn)行分析,上述問(wèn)題就變得容易,學(xué)生理解起來(lái)很輕松。
2 杠桿法的工作原理
2.1 單行星排齒輪傳動(dòng)時(shí)杠桿圖
由于一個(gè)行星排由太陽(yáng)輪、行星輪、齒圈及行星架構(gòu)成。根據(jù)其結(jié)構(gòu)特點(diǎn)將一個(gè)行星排等效為一個(gè)垂直杠桿和三個(gè)支點(diǎn),三個(gè)支點(diǎn)分別代表太陽(yáng)輪S、行星架PC和齒圈R。對(duì)于單行星行星排,由公式(3)和能量守恒定理可得出中間支點(diǎn)為行星架PC,兩端支點(diǎn)分別為S和R;對(duì)于雙行星行星排,由公式(5)和能量守恒定理可得出中間支點(diǎn)為齒圈R,兩端支點(diǎn)分別為PC和S。支點(diǎn)S和R距支點(diǎn)PC的長(zhǎng)度分別與太陽(yáng)輪齒數(shù)和齒圈齒數(shù)成反比,如圖1(a)、(b)所示為單行星行星排和雙行星行星排的杠桿圖,圖中為齒圈與太陽(yáng)輪的齒數(shù)比。可以用杠桿圖進(jìn)行行星齒輪的轉(zhuǎn)速分析,建立xoy坐標(biāo)系,三個(gè)支點(diǎn)按比例畫在y軸,x軸表示支點(diǎn)的轉(zhuǎn)速大小和方向,在這里假設(shè)輸入支點(diǎn)的轉(zhuǎn)速為1,方向朝x軸方向?yàn)檎喾礊樨?fù),被固定支點(diǎn)的轉(zhuǎn)速為 0。如圖 2(a)、(b)所示,圖(a)為單行星行星排轉(zhuǎn)速分析圖,齒圈R輸入、太陽(yáng)輪S被固定,行星架PC輸出,利用相似三角形定理,行星架的轉(zhuǎn)速nPC=κnR/(κ+1),屬于減速同向,與公式(3)計(jì)算結(jié)果一樣;圖(b)為雙行星行星排轉(zhuǎn)速分析圖,行星架PC輸入、太陽(yáng)輪S被固定,齒圈R輸出,利用相似三角形定理,齒圈的轉(zhuǎn)速nR=(κ-1)nPC/κ,屬于減速同向,與公式(5)計(jì)算結(jié)果一樣,但杠桿法更簡(jiǎn)單、直觀。

圖1 星排杠桿圖
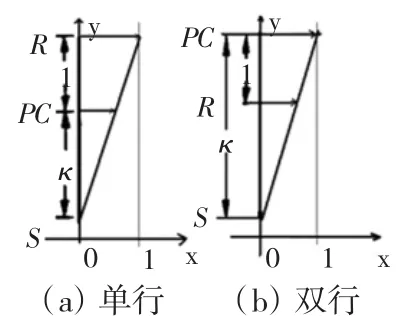
圖2 星排轉(zhuǎn)速圖
2.2 多行星排行星齒輪傳動(dòng)時(shí)杠桿圖
當(dāng)多行星排并聯(lián)時(shí),每個(gè)行星排視為一個(gè)垂直的杠桿和三個(gè)支點(diǎn),行星排之間的構(gòu)件相互連接,在杠桿圖上視為各支點(diǎn)之間的連接。在處理時(shí),根據(jù)需要,既可以將杠桿重疊,又可以將杠桿分開:重疊時(shí),將相互連接的部分合并為一個(gè)點(diǎn);將杠桿分開時(shí),連接點(diǎn)用一水平線來(lái)表示。兩種情況都要對(duì)杠桿的力臂進(jìn)行調(diào)整,調(diào)整時(shí)要保證連接部分合并點(diǎn)之間的力臂長(zhǎng)度相等,并且各杠桿力臂長(zhǎng)度比不變,這樣將多個(gè)行星排的杠桿圖合并為一個(gè)總杠桿圖,并在圖上標(biāo)上離合器C、制動(dòng)器B、單向離合器F以及輸入構(gòu)件i,輸出構(gòu)件o,即得多行星排并聯(lián)機(jī)構(gòu)的轉(zhuǎn)速杠桿圖[3]。如圖3所示為辛普森式行星齒輪機(jī)構(gòu)轉(zhuǎn)速圖,其中,(a)圖為行星齒輪機(jī)構(gòu)的示意圖;(b)圖為行星齒輪機(jī)構(gòu)轉(zhuǎn)速圖,C2B2(或F)接合得到1檔,連C2B2與PC1R2相交,交線段長(zhǎng)度為輸出轉(zhuǎn)速的大小,方向與輸入同向。同樣方法,C2B1接合得到2檔,C2C1接合得到3檔,C1B2接合得到R檔。
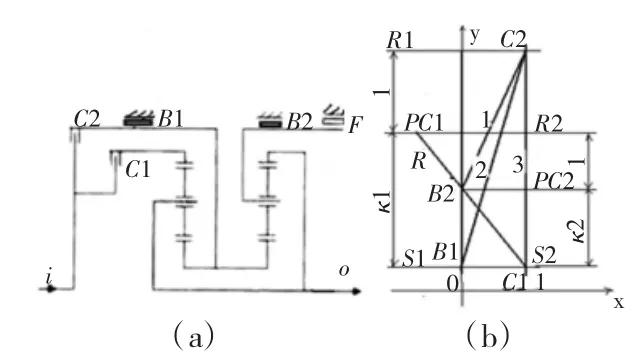
圖3 辛普森式行星齒輪機(jī)構(gòu)轉(zhuǎn)速圖
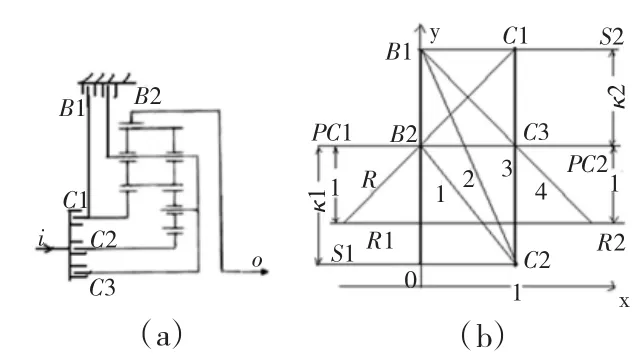
圖4 拉威娜式行星齒輪機(jī)構(gòu)轉(zhuǎn)速圖
如圖4所示為拉威娜式行星齒輪機(jī)構(gòu)轉(zhuǎn)速圖。其中,(a)圖為拉威娜式行星齒輪機(jī)構(gòu)結(jié)構(gòu)的示意圖;(b)圖為拉威娜式行星齒輪機(jī)構(gòu)轉(zhuǎn)速圖,C2B2接合得到1檔,連C2B2與R相交,交線段長(zhǎng)度為輸出轉(zhuǎn)速的大小,方向與輸入同向。同樣方法,C2B1接合得到2檔,C2C3接合得到3檔,C3B1接合得到4檔,C1B2接合得到R檔。各檔位傳動(dòng)比的大小可通過(guò)相似三角形的方法求解。
2.3 各檔位下傳動(dòng)比
參見圖 3(b)、圖 4(b),假設(shè)輸入件構(gòu)件的轉(zhuǎn)速為1,制動(dòng)件構(gòu)件轉(zhuǎn)速為0,輸出構(gòu)件轉(zhuǎn)速為該檔位的轉(zhuǎn)速線的長(zhǎng)度,方向與x軸向同為正,相反為負(fù),利用相似三角形的關(guān)系,很快可以得出此時(shí)的傳動(dòng)比。辛普森式自動(dòng)變速器和拉威娜式自動(dòng)變速器各檔傳動(dòng)比的大小,如表1和表2所列。

表1 辛普森式自動(dòng)變速器各檔傳動(dòng)比
表2 拉威娜式自動(dòng)變速器各檔傳動(dòng)比
3 杠桿法的具體應(yīng)用
現(xiàn)以ZF公司生產(chǎn)的5速電子控制自動(dòng)變速器5HP-24為例,應(yīng)用杠桿法來(lái)分析它的傳動(dòng)路線及傳動(dòng)比。
5HP-24自動(dòng)變速器動(dòng)力傳遞路線示意圖如圖5(a)所示。由圖可知,行星齒輪組由三個(gè)單級(jí)行星齒輪機(jī)構(gòu)組成。行星排1的行星架與行星排2的內(nèi)齒圈相連;行星排1的內(nèi)齒圈與行星排2的行星架及行星排3的內(nèi)齒圈相連;行星排2和行星排3的太陽(yáng)輪相連。行星排3的行星架是動(dòng)力輸出端。變速器內(nèi)部共有7個(gè)換擋執(zhí)行元件,包括3個(gè)離合器、3個(gè)制動(dòng)器和1個(gè)單向離合器。
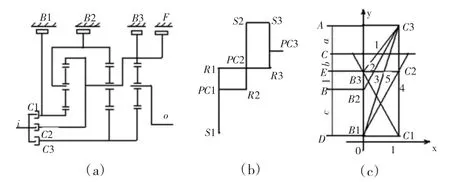
圖5 5HP-24自動(dòng)變速器杠桿圖
3.1 建立5HP-24傳動(dòng)機(jī)構(gòu)的杠桿圖
在三行星排并聯(lián)時(shí),每個(gè)行星排視為一個(gè)垂直的杠桿和三個(gè)支點(diǎn),行星排之間的構(gòu)件相互連接,在杠桿圖上視為各支點(diǎn)之間的連接。三行星排并聯(lián)時(shí),在杠桿圖上有五個(gè)個(gè)支點(diǎn),如圖5(b)所示,各支點(diǎn)的距離由行星輪的特性系數(shù)κ決定。
3.2 計(jì)算5HP-24傳動(dòng)機(jī)構(gòu)各檔位下傳動(dòng)比
合并圖 5(b)的杠桿圖,建立圖 5(c)所示的杠桿轉(zhuǎn)速圖。假設(shè)輸入件構(gòu)件的轉(zhuǎn)速為1,制動(dòng)件構(gòu)件轉(zhuǎn)速為0,輸出構(gòu)件轉(zhuǎn)速為該檔位的轉(zhuǎn)速線的長(zhǎng)度,方向與x軸向同為正,相反為負(fù),利用相似三角形的關(guān)系,求各檔的傳動(dòng)比。設(shè) AC= α、CE=b、ED=1、DB=c,其中,各檔的傳動(dòng)比見表3。從轉(zhuǎn)速圖可知,三行星排這種并聯(lián)布置形式可實(shí)現(xiàn)六個(gè)前進(jìn)檔,但這款變速器只采用前五檔。
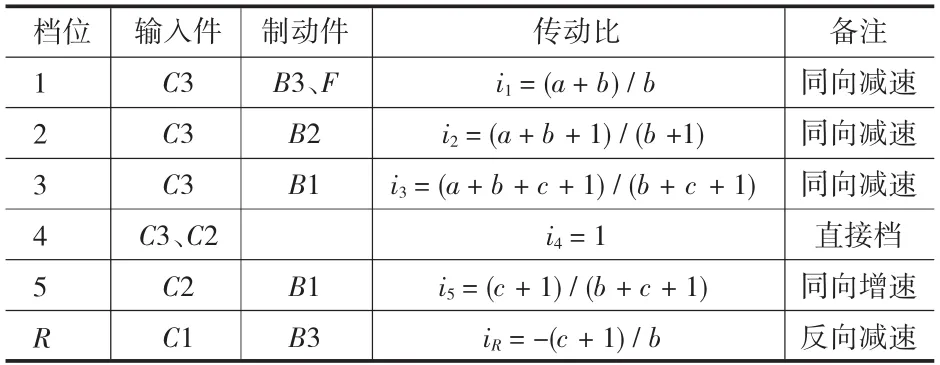
表3 5HP-24自動(dòng)變速器各檔傳動(dòng)比
4 結(jié)束語(yǔ)
(1)在教學(xué)中,首先讓學(xué)生掌握杠桿法的工作原理,單行星齒輪排轉(zhuǎn)速分析圖的畫法,這點(diǎn)很重要,是應(yīng)用杠桿法的關(guān)鍵。
(2)畫多行星排行星齒輪傳動(dòng)時(shí)杠桿圖時(shí),相互連接的部分重疊時(shí)合并為一個(gè)點(diǎn),將杠桿分開時(shí),連接點(diǎn)用一水平線來(lái)表示;保證連接部分合并點(diǎn)之間的力臂長(zhǎng)度相等,并且各杠桿力臂長(zhǎng)度比不變。
(3)杠桿法不但可以計(jì)算并聯(lián)行星齒輪排的傳動(dòng)比,各構(gòu)件的相對(duì)轉(zhuǎn)速也可通過(guò)杠桿法轉(zhuǎn)速圖進(jìn)行分析。
[1]楊可禎,程光蘊(yùn),李仲生.機(jī)械設(shè)計(jì)基礎(chǔ)[M].北京:高等教育出版社,2006.
[2]陳家瑞,馬天飛.汽車構(gòu)造[M].北京:人民交通出版社,2006.
[3]李興華,何國(guó)旗,等.效杠桿法分析行星齒輪傳動(dòng)[J].機(jī)械傳動(dòng),2004,(1):44-45.