數控設備運動誤差的基本類型和解決方法
2012-02-21 07:28:16張興旺
裝備制造技術 2012年11期
關鍵詞:設備
張興旺
(江蘇省聯合技術學院無錫交通分院,江蘇 無錫 214062)
計算機的發展速度已經使傳統的制造體系,無法適應現代機械制造業的發展需求。隨著全新制造模式的出現。數控設備也必須隨之改進自身的功能,其作為現代機械制造業的重要加工工具,對制造業實現柔性、自動化、集成化、智能化起著舉足輕重的作用,其應用能力、加工效率的高低直接體現了企業的加工水平和生產實力。所以,數控設備的誤差應該降到最低。本文根據加工出的成品零件的微觀形狀對數控設備的運動誤差進行原因分析,并找到相應的解決方法。
數控設備在精密零件加工方面有著重要的作用,但是在檢測加工好的零件的時總會發現各種問題,我們從零件微觀形狀這一方面來檢測和觀察,可以確定數控設備存在著許多的問題。以下就數控設備運動誤差的基本類型和基本方法來闡述,僅以和同行探討。
1 反向間隙誤差
反向間隙誤差是指由于機床傳動鏈中機械間隙的存在,機床執行件在運動過程中,從正向運動變為反向運動時,執行件的運動量與理論值存在的誤差,最后反映為疊加至工件上的加工精度的誤差。反向偏差會影響查補運動的精度,如在g01切削運動時,方向偏差會影響插補運動的精度,偏差過大就會造成“圓不夠圓,方不夠方”的情形。另外,反向偏差還會影響到機床的定位精度,使得鉆孔等工作受到阻礙,影響工作的正常開展。在這里我就反向間隙誤差的原因及解決方案做一下詳細的解析如圖1所示。

圖1 反向間隙誤差
1.1 反向間隙誤差產生的原因
(1)機械運動在改變方向時,導軌的間隙引起運動,導致間隙過大。
(2)編碼器磁滯現象的影響。
(3)在運動時滾珠絲杠的末梢部分有輕微的浮動。
(4)間隙補償量不適當。
(5)滾珠絲杠由于應力過大而造成部分磨損,從而導致滾絲竹杠彎曲。
(6)滾珠絲杠由于熱度過大而變形。
(7)驅動聯接磨損。
(8)配重平衡影響。
1.2 反向間隙誤差的解決方法
(1)機械運動在改變方向時,確定導軌間隙。
(2)正確設定間隙補賞量。
(3)隨時調整編碼器磁滯現象影響的數據。
(4)調整傳送帶或者楔鐵在運動過程中的的松緊度。
(5)及時檢查傳送部分零件,若發現破損,及時更換。
(6)配重平衡系統要做到及時調整。
2 周期性誤差
周期性誤差是指以某一固定量為周期重復出現的系統誤差,屬于測距單元的一項原理誤差,對測距精度有直接的影響。測距儀指以一定距離為周期重復出現的測距誤差。光學度盤指以某一角度為周期重復出現的分劃誤差。它主要來源是儀器內部電信號的竄擾以及光信號的竄擾,并且在接收單元形成一個固定不變的干擾信號。然而對這些竄擾卻不易捕捉的到,甚至是束手無策,只能測定其誤差值的大小與相位,對測量成果進行周期性誤差的改正。對于周期性誤差問題我做了以下方面的研究如圖2所示。

圖2 周期性誤差
2.1 周期性誤差產生的原因
(1)滾珠絲杠在運動過程中有輕微的跳動。
(2)配重平衡系統失效。
2.2 周期性誤差產生的解決方法
(1)調整滾珠絲杠避免跳動現象發生。
(2)調整配重平衡系編程。
3 粘滯爬行誤差
通過對機床導軌爬行現象的產生機理分析可知,在系統模型傳輸帶速度減小的過程中,系統的靜平衡狀態失穩,出現了純滑動和粘滯——滑動形式的導軌爬行現象。機床導軌爬行嚴重影響機床的加工精度、表面粗糙度和定位精度,是精密機床及重型機床必須解決的問題。粘滯爬行誤差的存在首先會損壞到局部的零部件,慢慢的會影響到機器其它零部件的正常功能,進而導致整部機器癱瘓。以下是我針對此問題所做的具體的研究總結如圖3所示。

圖3 粘滯爬行誤差
3.1 粘滯爬行誤差產生的原因
(1)低速運轉時進給動力不足。
(2)滑軌潤滑的誤差。
(3)導軌損壞。
(4)楔鐵變形。
3.1 粘滯爬行誤差的解決方法
(1)檢查導軌的完好性。
(2)檢查潤滑導軌面。
(3)校正楔鐵。
(4)加大伺服增益。
4 運動丟失誤差
運動丟失誤差指的是影響設備正常運轉的自身缺失的因素,是人為的缺失,可以是機器銜接間隙大小有誤、可以是零部件變形等等。在軸承零件加工的每一道工序中,為了獲得直線運動軸承加工表面的尺寸、形狀和位置精度,總得對機床、夾具和刀具進行調整,任何調整工作都必然會帶來一定的誤差。運動丟失誤差總體來說比較好控制,它大多都是直觀因素,平時多注意對機器進行維護檢修,就可以最大程度的避免。下面,我就運動丟失誤差得以滋生的原因及解決方案做一下具體的闡述如圖4所示。
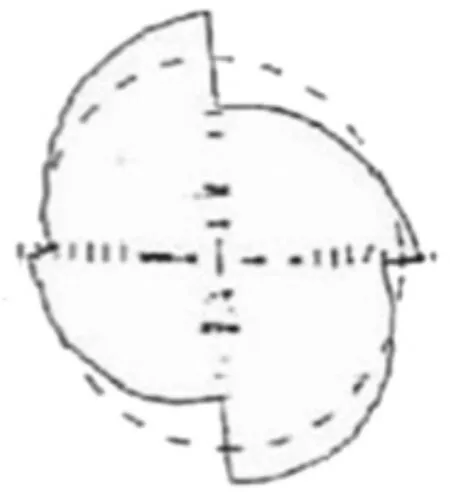
圖4 運動丟失誤差
4.1 運動丟失誤差產生的原因
(1)滾珠絲杠和支撐在數控設備在運動過程中由于彈性比較大導致運行軌道的變形。
(2)在運動過程中的滑動阻力造成驅動系統的變形。
(3)軸承座的內軸承之間軸向的游隙過大。
(4)軸承座的剛性不足,由彈性引起軌道變形。
4.2 運動丟失誤差產生的解決方法
(1)檢查滾珠絲杠和支撐是否變形。
(2)潤滑導軌。
(3)調整軸承座的內軸承,消除間隙。
(4)調整軸承的剛性。
5 矩形誤差
是指零部件角度不精準,或是因外部原因導致零部件受磨損。舉一個很平常的例子,在繪制矩形中心線時,首先腦袋里會有一個具體的設計框架,但是當下筆畫下來時總會覺得這有毛病、那有毛病,線直不直、長不長、短不短等等,稍有不慎就會出現偏差,這個偏差就成了誤差形成的要因。因為工件各處尺寸的設置在一定程度上需要人工進行尺寸編程,需要重視精度的把握,誤差的產生不可避免。下面就矩形誤差產生的原因及解決方案做一下具體分析如圖5所示。

圖5 矩形誤差
5.1 矩形誤差產生的原因
(1)兩軸的角度有誤差,并非垂直90°。
(2)滾珠絲杠有輕微的彎度。
(3)導軌磨損。
(4)工作臺平面度超差。
5.2 矩形誤差的解決方法
(1)調整軸向,確定角度準確。
(2)檢查滾珠絲杠。
(3)修磨導軌。
(4)修整工作臺。
6 比例誤差
比例誤差是指與被測距離成比例的測距誤差。比例誤差可以造成零部件銜接不緊密、兩軸之間運行不一致等不正常現象,致使機器不能正常運轉。我們都知道,在數控設備方面,存在比例控制技術,這種技術價廉、可靠且實用。這一項技術的發明很大程度上嚴格控制了比例誤差的產生,使得數控設備在這個微電子盛行的時代得以穩健的生存。只能說為了更大程度的完善設備的性能,多方面的去彌補、減小誤差的產生,但是終歸還是杜絕不了誤差的存在。以下,就誤差產生的原因及解決方案做一具體分析如圖6所示。

圖6 比例誤差
6.1 比例誤差產生的原因
(1)兩條運行軸之間運行位置不同。
(2)線性誤差補償參數的設定有一定的誤差。
(3)滾珠絲杠熱度過高或者已經損壞。
(4)導軌平行度不夠精準或者剛性不夠充足。
6.1 比例誤差的解決方法
(1)補償參數的設定要精準。
(2)滾珠絲杠的檢查工作要到位。
(3)檢查導軌。
7 結束語
上述的幾種只是通過對精加工零件出現問題的部分分析,并不能涵蓋所有問題,只是簡單的通過找出數控設備在運動過程中存在的問題,進行有針對性的分析,提出基本的解決方法,還有很多問題在以后操作過程中繼續探索。
[1]裘為章.實用起重機電氣技術手腳[M].北京:機械工業出版社,2002.
[2]CB50055.通用用電設備配電設計規范[S].
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00