高速公路綠籬修剪機運動學仿真分析
2012-02-20 03:32:44歐陽天成梁燕成陳樹勛
裝備制造技術 2012年11期
歐陽天成,梁燕成,陳樹勛
(廣西大學 機械工程學院,廣西 南寧 530004)
當今綠籬修剪機被廣泛應用于高速公路綠籬修剪和園林美化,大幅度提高了工作效率。今后綠籬修剪機將朝著一機多用、自動化程度高、適應性強、工作可靠、環保等方面發展。基于這一思想,并參考現有修剪機的設計方法,本文設計出了一款結構簡單、功能優越的高速公路綠籬修剪機,如圖1所示。該修剪機不僅能在高速公路和園林上進行綠籬修剪,還可以在公園、城市小區的草坪上割灌。修剪機的工作原理大致為:液壓馬達驅動回轉平臺,調整工作臂的空間位置;舉升液壓缸驅動舉升臂繞基座旋轉,調整工作臂的修剪高度;伸縮液壓缸驅動伸縮臂,調整修剪機構修剪距離;翻轉油缸驅動刀架盤旋轉,調整修剪機構作業角度;修剪電機通過皮帶驅動刀片旋轉;承載車向前移動,修剪機向前推進作業。
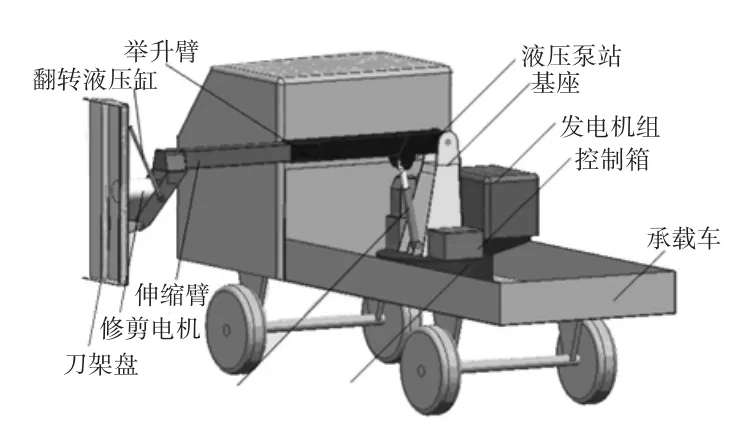
圖1 修剪機設計結構總成
為了驗證設計的可行性,需使用ADAMS軟件進行運動學仿真分析。仿真結果表明,修剪機的運動參數符合所設計的要求,各構件間沒有出現干涉和“死點”問題,所選的液壓缸滿足使用要求,達到了預期的設計效果。
1 修剪機運動學仿真分析
修剪機運動學仿真的目的:檢驗運動干涉和“死點”問題;獲得修剪機主要技術參數;提取液壓缸作用力。運動機構“死點”是指:當從動件上的壓力角為90°,驅動力對從動件的有效回轉力矩為零,這個位置稱為機構的死點位置。修剪機運動學仿真分析如下。
1.1 建立模型,添加運動副
仿真的CAD模型在UG中建立,如圖2所示,此時的修剪機為裝車轉場狀態。將模型導入ADAMS后,在各連接構件間添加相關的運動副,運動副所在的位置和性質如圖3和表1所示。
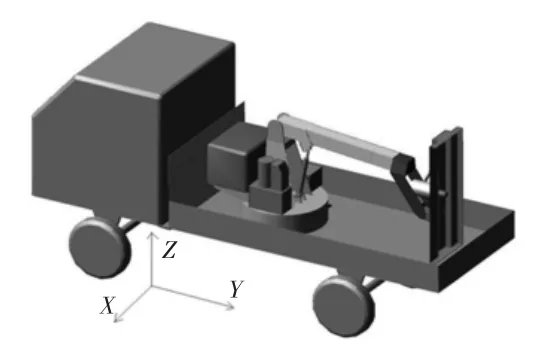
圖2 修剪機仿真模型
21.2 計算修剪機模型的自由度
模型中有16個運動構件、8個固定副(承載車與大地固接)、8個低副、2個高副和4個驅動副,則模型的自由度為

施加4個驅動約束后,模型的自由度為0,則模型的運動軌跡已確定。
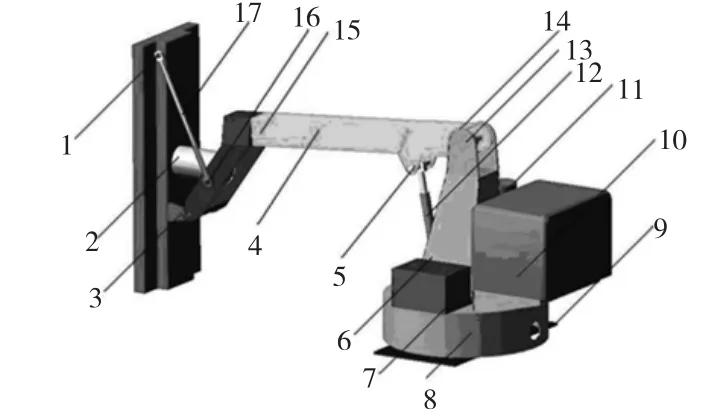
圖3 修剪機運動副約束位置
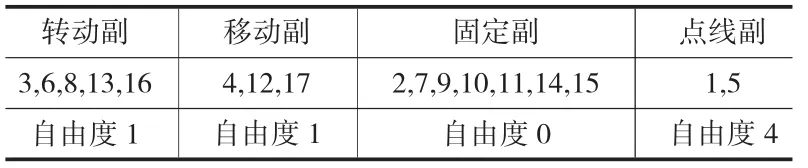
表1 四種運動副約束
1.3 制定修剪機的運動方案
虛擬仿真模擬修剪機六個極限作業姿態和轉場運輸姿態,以此來檢驗修剪機設計方案的合理性以及在任意時刻的運動狀態,每個修剪姿態作業時間為15 s,280 s完成7個修剪姿態。運動方案如表2所示。

表2 修剪機的運動方案
1.4 對模型施加驅動副
根據模型運動特點,決定采用ADAMS庫函數里的三次多項式構造STEP階躍函數作為液壓缸中移動副的驅動函數,STEP函數的具體表達式為:

式中,
X為自變量;
X0為階躍函數起點自變量值;
H0為階躍函數起點函數值;
X1為階躍函數終點自變量值;
H1為階躍函數終點函數值。
根據修剪機運動方案定義STEP函數,用時間(time)表示X;液壓缸初始時間表示X0;液壓缸初始伸長量表示H0;液壓缸終點時間表示X1;液壓缸終點伸長量表示H1。
按照修剪機的運動方案,把液壓缸活塞桿的伸長量定義為時間(time)變化的函數,采用以下函數來描述三對液壓缸和回轉支承的運動:
(1)舉升液壓缸的移動副驅動函數
STEP(time,0,0,20,255)+STEP(time,20,0,100,0)+STEP(time,100,0,130,-387)+STEP(time,130,0,145,0)+STEP (time,145,0,160,29)+STEP(time,160,0,175,0)+STEP(time,175,0,190,141)+STEP(time,190,0,235,0)+STEP(time,235,0,255,100)+STEP(time,255,0,270,0)+STEP(time,270,0,280,-138)
負號表示移動副沿正方向的反向運動,即沿活塞桿縮進方向運動。
(2)伸縮液壓缸的移動副驅動函數
STEP (time,0,0,35,0)+STEP (time,35,0,55,1100)+STEP(time,55,0,235,0)+STEP(time,235,0,255,-1100)
(3)翻轉液壓缸的移動副驅動函數
STEP (time,35,0,55,486)+STEP (time,55,0,70,0)+STEP (time,70,0,85,-321)+STEP (time,85,0,100,0)+STEP (time,100,0,130,179)+STEP(time,130,0,145,0)+STEP(time,145,0,160,-402)+STEP(time,160,0,175,0)+STEP (time,175,0,190,490)+STEP(time,190,0,205,0)+STEP(time,205,0,220,-409)+STEP(time,220,0,235,0)+STEP(time,235,0,270,0)+STEP(time,270,0,280,-23)
(4)回轉支承的轉動副驅動函數
STEP (time,20,0,35,-90d)+STEP(time,35,0,255,0)+STEP(time,255,0,270,90d)
2 修剪機的運動學仿真結果
2.1 運動學仿真動畫
在仿真計算后,可獲得修剪機的運動軌跡動畫。其中有六個重要的極限位置,即最高水平、豎直修剪,最低水平、豎直修剪,最遠水平、豎直修剪,它們的動畫截圖如圖4所示。

圖4 修剪機極限位置
2.2 運動學仿真數據處理
經過仿真計算后,產生的各類數據已存在ADAMS的數據庫里,在ADAMS中對仿真分析的結果進行數據處理的目的:
(1)通過在刀架盤上、下防護裙和地面處定義標記點,獲得修剪機最高水平、最高豎直修剪高度;最低水平修剪高度、最低豎直修剪高度;最遠水平修剪距離和最遠豎直修剪距離。
(2)提取舉升臂水平夾角。
(3)提取舉升液壓缸、伸縮液壓缸、翻轉液壓缸負荷。
280 s完成7個修剪姿態運動學仿真后處理,相關圖表如圖5~圖10所示。
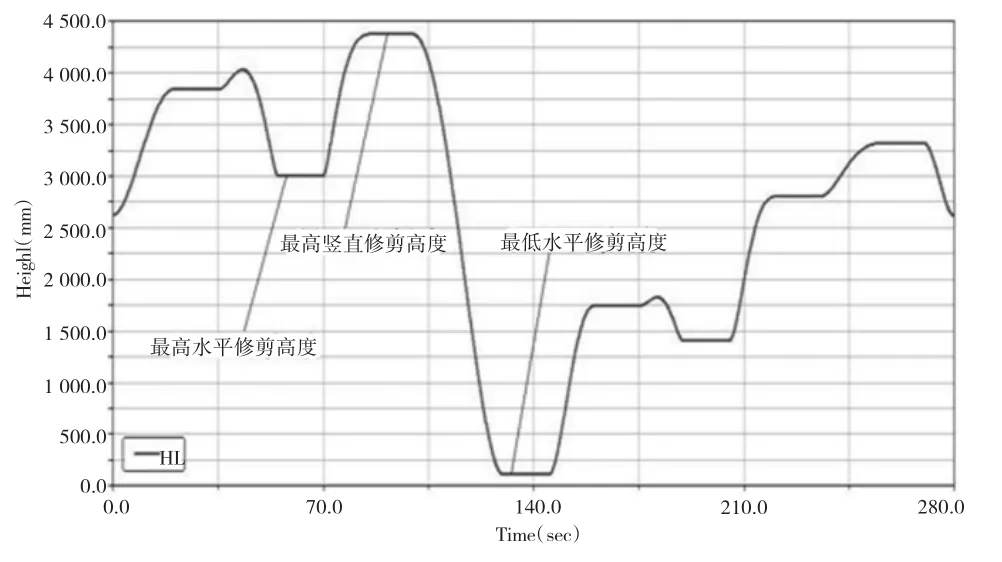
圖5 修剪高度參數
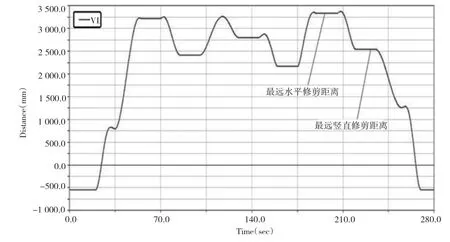
圖6 修剪距離參數
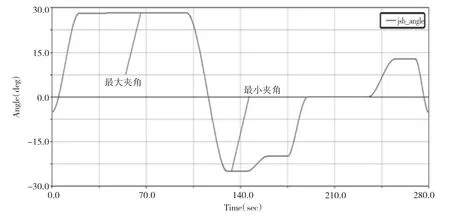
圖7 舉升臂水平夾角
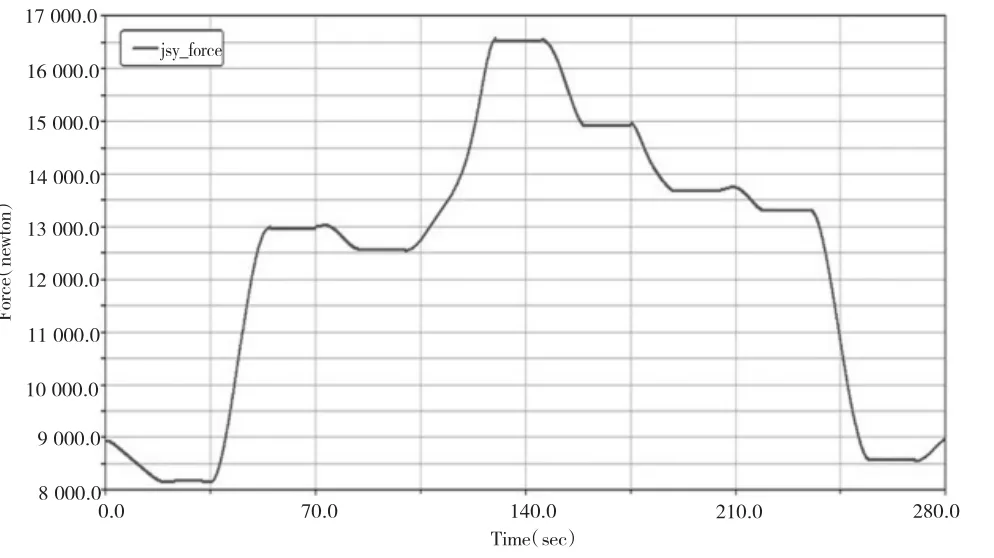
圖8 舉升液壓缸負荷
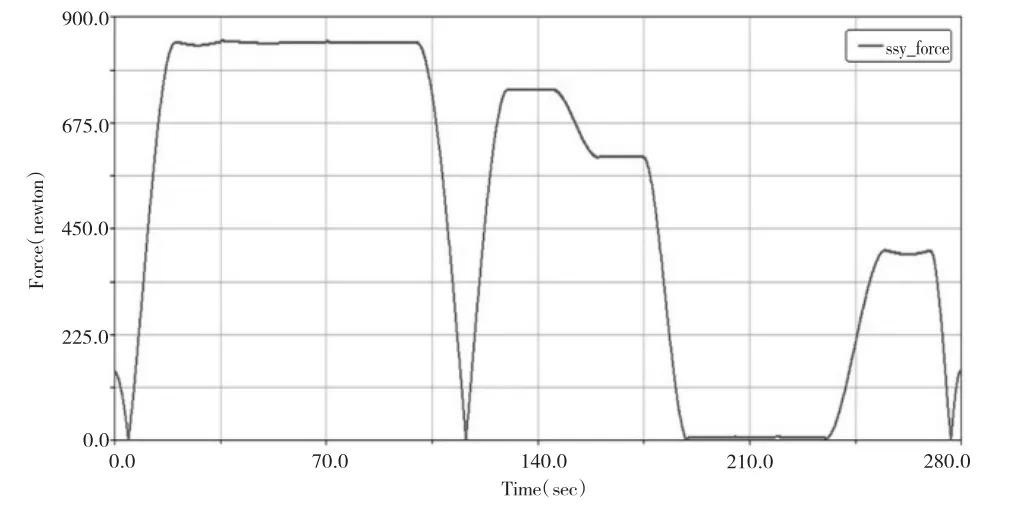
圖9 伸縮液壓缸負荷

圖10 翻轉液壓缸負荷
通過運動學仿真可以得到修剪機主要作業參數的仿真值,并將其與設計值對比,校核設計方案能否達到設計要求。仿真值與設計值比較如表3所示。
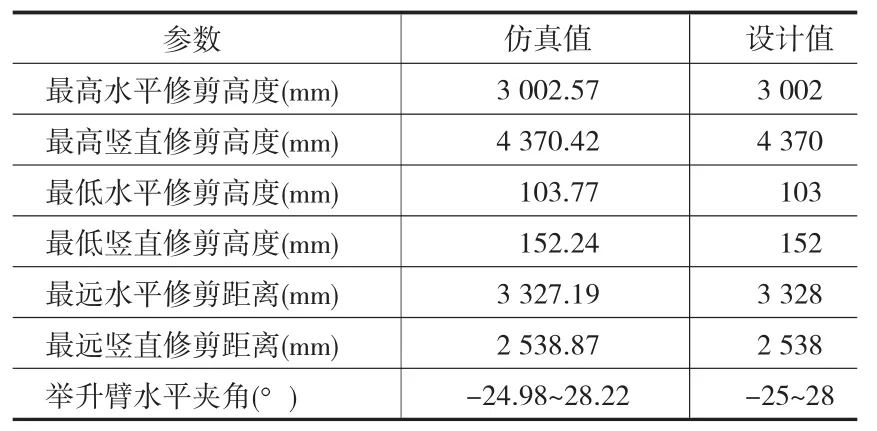
表3 仿真值與設計值比較
仿真結果表明,修剪機在作業過程中各個運動構件沒有發生運動干涉和出現“死點”問題,由于ADAMS仿真計算是通過STEP函數控制,計算步長不是無限小,所以STEP函數會出界,導致運動學仿真獲得的作業范圍與設計值存在一定的差異,但這些差異都控制在設計要求允許的范圍之內,修剪機設計方案符合實際要求。
2.3 仿真數據的驗證
為了進一步給校核修剪機液壓缸和為液壓缸的選擇提供負荷特性參考,可以把初始選配液壓缸的數據與仿真模型中對應的數據進行比較。本文分別校核舉升液壓缸、伸縮液壓缸和翻轉液壓缸的最大輸出力。
根據液壓缸企業提供的資料,初選定的三種液壓缸額定輸出壓力都為16 MPa,活塞桿外徑分別為36、28、22 mm,三種液壓缸最大輸出力的仿真值與額定值比較如表4所示。

表4 液壓缸仿真值與額定值比較
通過表4得知,三種液壓缸的最大仿真輸出壓力都小于額定輸出壓力,所以初步選配的液壓缸符合設計要求。
3 結束語
通過ADAMS對所設計的高速公路綠籬修剪機進行運動學仿真分析。仿真后所獲得的修剪機運動參數和液壓缸參數均滿足設計要求,并且各構件間未發生干涉和“死點”問題,從而證明了該設計的可行性。
[1]曹海東.高速公路養護機械設備與管理[J].遼寧工程技術大學學報(自然科學版),2011,30(5):208-210.
[2]孟俊煥,王衛東,劉 敏.園林綠化機械設備的現狀與發展趨勢[J].農業裝備與車輛工程,2006,174(1):4-5.
[3]鄭建榮.ADAMS虛擬樣機技術及提高[M].北京:機械工業出版社,2002.
[4]李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2006.
[5]李 軍.ADAMS實例教程[M].北京:北京理工大學出版社,2002.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30