3-UPS/S并聯轉臺的遠程控制
2012-02-20 08:49:52岳曉虎韓先國
裝備制造技術 2012年7期
樊 銳,岳曉虎,韓先國
(北京航空航天大學 機械工程及自動化學院,北京 100191)
并聯機構作為一種新型的傳動機構,具有剛度大、承載能力強、誤差小、精度高、自重負荷比小、動態性能好、容易控制等一系列優點[1],已廣泛地應用于機器人、并聯機床、運動仿真器等。3-UPS/S是一種串并聯機構,其既繼承了并聯機構的優點,又發揮了串聯機構運動空間大的特點,是并聯機構的一個重要發展趨勢[2]。
轉臺作為航空、航天等領域中進行仿真和測試的關鍵設備,在飛行器的研制過程中,起著極其重要的作用。傳統的三軸轉臺結構,本質上是由3個轉動副串聯而成,是典型的串聯機構,其優點是在3個轉動方向都可以實現360°回轉,轉動空間非常大。與傳統轉臺相比,并聯轉臺具有的優點如下:并聯轉臺體積和凈質量可以大大減小;并聯機構反解容易的特點使之軌跡規劃簡單,易于控制;動平臺運動靈活,容易實現多個自由度聯動以及適應多種仿真和測試任務。
本文以一種三自由度3-UPS/S并聯轉臺為研究對象,遠程控制系統要求實現每50 ms收發一組數據,角位置精度達到0.05°及角速度精度達到0.01°/s。根據需求搭建“PC+PMAC”為硬件平臺的控制系統,利用CAN總線的遠程數據傳輸功能,實現了并聯轉臺的遠程控制。
1 機構介紹
并聯轉臺需要實現3個自由度的轉動,轉動的工作空間分別為
α=± 40°,β=± 40°,γ=± 360°。
根據需求設計的并聯三軸轉臺的機械部分由電動轉臺、靜平臺、動平臺、中央立柱以及3條由螺母絲杠組成的支鏈組成,如圖1所示。
其中,中央立柱以及3條伸縮支鏈與靜平臺的連接,采用高精度的球鉸來實現,3條伸縮支鏈與動平臺的連接,采用高精度的虎克鉸來實現。3條支鏈在伺服電機的驅動下連同電動轉臺,使得并聯轉臺可以繞空間X軸、Y軸、Z軸實現3個自由度的轉動。
2 系統的控制策略
控制系統采用IPC+PMAC運動控制卡的結構形式。控制系統硬件主要包括工控機、PMAC運動控制卡、CAN卡、電動轉臺、安川伺服電機及驅動器組成。控制系統原理圖如圖2所示。
其中下位機采用工控機,向用戶提供良好的操作界面,使用戶完成模式切換、遠程控制、參數設置、監控等操作。PMAC運動控制卡和接口卡,共同實現伺服電機的精確位置伺服控制。遠程計算機通過CAN通訊卡,向下位機發送位置和速度信息,PMAC卡通過PCI總線,接受工控制的控制命令,實現對4個軸的控制。
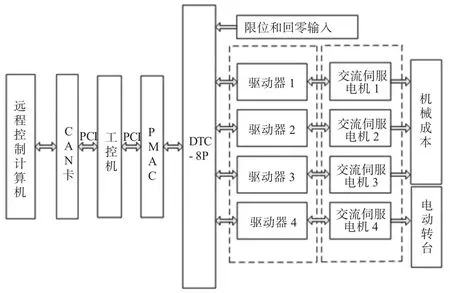
圖2 3UPS/S控制系統原理圖
3 并聯轉臺遠程控制
遠程計算機提供并聯轉臺3個自由度的運動軌跡,按照一定的時間間隔(如50 ms)將運動軌跡在時間軸上進行離散化,得到時間軸上并聯轉臺位置、速度的離散序列,并且按照此時間間隔,定時向工控機發送離散后的一組位置與速度,當工控機接收到一組數據后,配合PMAC卡與伺服單元,驅動各個伺服電機運動到相應的位置。
結合并聯機構的虛實插補策略(虛軸粗插補、實軸精插補)[3],為了實現遠程控制,整套遠程控制系統,需要具備遠程數據傳輸和位置伺服兩個主要功能,因此整個遠程控制系統可以分成以下兩個部分:
(1)遠程數據的傳輸,該過程由CAN總線實現;
(2)支鏈的軌跡控制,該過程由工控機、PMAC卡、伺服單元與伺服電機共同完成,其中工控機完成位置逆解運算、運動程序語句的生成以及下載;PMAC、伺服單元與伺服電機共同完成位置的精確伺服控制。
3.1 遠程數據傳輸
CAN是一種多主方式的串行通信總線,可提供高達1 Mbit/s的數據傳輸速率。研華PCI-1680有兩個獨立的CAN接口,可以實現單PC自發自收,使得上位機的軟件調試工作,得以方便進行,在卡的內部,采用了SJA-1000作為CAN控制器,PCA-82C250作為CAN收發模塊[4]。
PCI-1680U驅動程序中所用到的主要函數大多在CANbus2.0.h里進行了聲明,在原驅動程序中API調用函數順序如圖3所示,其中圖3(a)為數據發送流程,圖3(b)為數據接收流程。
并聯轉臺軌跡經過粗插補后的位置與速度值,以報文的形式按間隔時間從遠程計算機發送到上位機,在PCI-1680中報文的表示方法為:
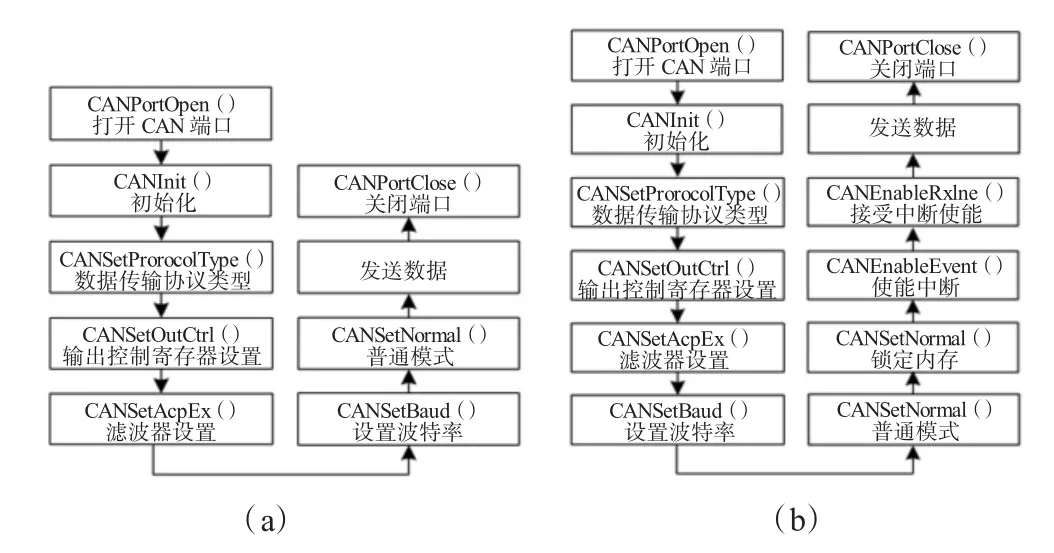
圖3 API調用函數順序流程圖
typedef struct{
UCHAR ff;
UCHAR rtr;
ULONG id;
UCHAR dlen;
UCHAR data[8];
}CAN_MSG;
其中,
ff為選擇使用標準幀格式還是擴展幀格式,根據需求選擇具有29位標識符的擴展幀格式;
rtr為遠程標志位,發送數據時該位應設為0;
id為報文的標識符;
dlen為數據的長度;
data[8]為存儲的具體位置與速度信息。
由于每一個位置與速度值都是一個double類型,因此規定一個報文只存儲一個位置值或速度值,這樣一組完整的遠程信息就包括6個報文,即3個位置與3個速度,如表1所示。
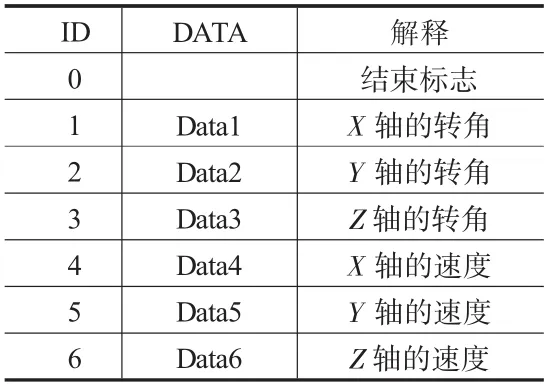
表1 CAN通信的具體報文
報文的ID為1~3代表X軸、Y軸、Z軸的轉角,ID為4~6代表各軸的速度,ID為0為停止標志。
應用PCI-1680U接收遠程報文,有兩種方案:
(1)一組完整的遠程信息共包含6個報文,因此在接收方定義一個6個報文大小的FIFO接收緩沖區,當接收緩沖區接收到6個報文后,系統會產生一個事件,通知從緩沖區中讀取這些數據;
(2)在接收數據方建立一個比較大的FIFO接收緩沖區,自動接收保存通過CAN總線發過來的數據。然后等待工控機將一組完整的信息從緩沖區中順序讀出來。
第一種方案中,當下一組數據到達后,而第一組數據還未被讀取時,可能會造成數據混亂或者丟失,需要有足夠大的緩沖區,來接接收這些數據,為了避免數據的混亂或者丟失,采用第二種方案接收報文信息。
當并聯轉臺進入遠程控制模式并開始接收命令時,工控機會一直查詢CAN緩沖區內是否有數據到達,如果有數據到達,則將數據按順序存儲在一個數組里,當收到ID從1到6的一組數據后,工控機暫時停止查詢緩沖區,轉而進行處理數據,當該組數據處理完成后,工控機又開始查詢緩沖區。當接收到ID為0的數據時,工控機停止讀取緩沖區,等待電機停止后退出遠程模式。接收遠程數據的流程具體如圖4所示。
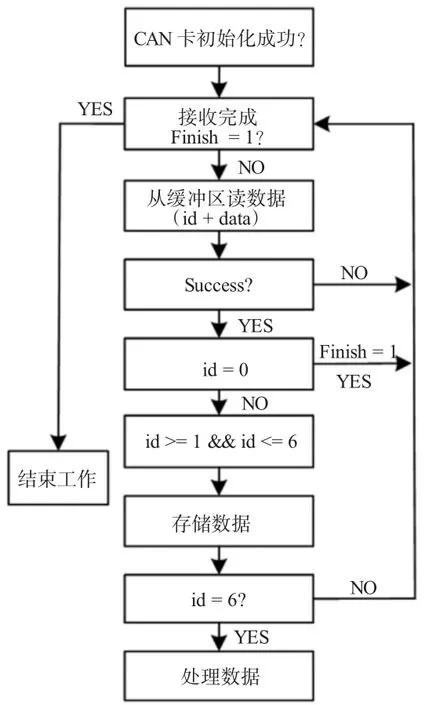
圖4 CAN通訊流程圖
3.2 PMAC軌跡控制
當遠程計算機按照間隔時間發來數據后,工控機應該及時接收、處理、轉化為程序語句,并下載到PMAC卡中,為了能夠快速執行程序語句,需要在PMAC卡中建立旋轉緩沖區,旋轉緩沖區允許在程序執行的期間對程序進行下載,并覆蓋已經被執行的程序行[5]。這樣PMAC卡在接收到程序語句后,就會將程序語句放入緩沖區中等待執行。
緩沖區的具體定義如下:
A;停止所有運動
CLOSE;關閉所有緩沖區
&1 DELETE ROT;刪除存在的緩沖區
&1 DEFINE ROT{常量};常量為緩沖區大小,
B0;準備運行
&1 OPEN ROT;打開緩沖區
PVT{常量};選定PVT的時間間隔
R程序開始執行
CLOSE;關閉緩沖區
這里的PVT是指位置—速度—時間插補方式,之所以選擇PVT精插補方式,是由于這種插補方式能實現對軌跡圖形更緊湊地控制。
通過CAN接收到數據后,要經過位置逆解,轉化為各桿的伸縮量及速度,記為當前位置,將當前位置和前一個位置之間平均細分為5個位置,這是由于使用PVT插補方式時,緩沖區中必須保證至少有兩條指令,才能開始執行,然后將細分后的位置與速度寫成程序語句,下載到PMAC卡中等待執行。
結合CAN的遠程數據傳輸以及PMAC的軌跡控制,設計出如圖5所示的遠程控制流程圖。
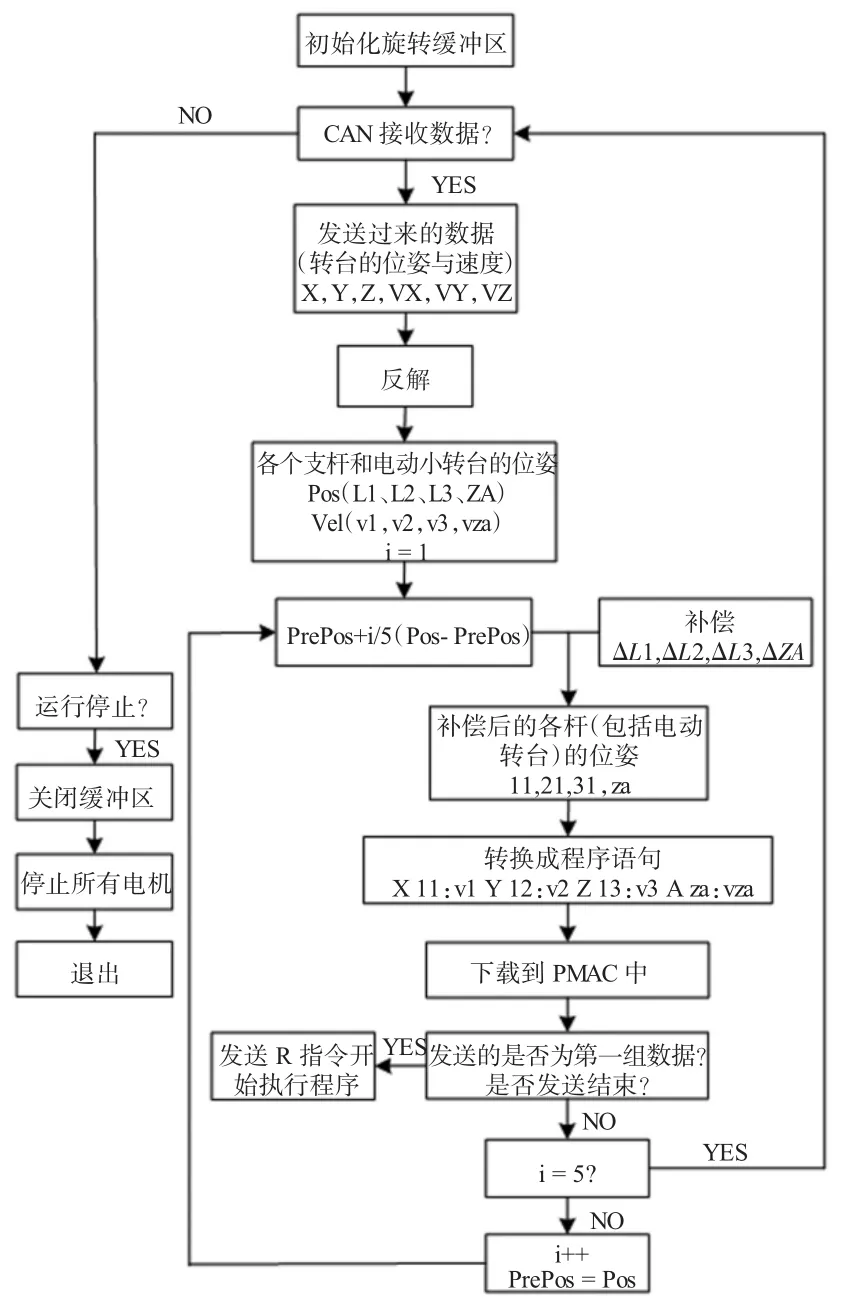
圖5 遠程運動控制流程圖
4 實驗
一般速率精度的測試方法,有定角測時法和定時測角法[6]。
根據現場實驗條件,遠程控制系統采用定時測角法,來測量并聯轉臺速率精度。
首先在遠程計算機中,采用S型速度曲線規劃并聯轉臺勻速運行的位置曲線,并且將并聯轉臺的位置、速度軌跡在時間軸上按照50 ms間隔進行離散化。
然后采用VC中高精度的多媒體定時器定時每隔50 ms向下位機發送一組位置、速度信息,下位機在接收到數據后,經過反解、細分、寫成程序語句,下載到PMAC卡的旋轉緩沖區等待執行。當轉臺運行平穩后,在下位機中同樣采用VC中高精度的多媒體定時器定時一定時間(該時間由角度增量的名義值和速度決定,一般選取的角度增量名義值為10°)讀取4個電機編碼器的位置反饋值,連續測量11次,保證有10個時間間隔。
最后通過位置正解,求得并聯轉臺實時位置,通過計算可以得出轉臺的速度。
定時測角法速率精度Uω的計算公式為[6]
式中,
θg為給定速率下,被測軸在規定采樣時間間隔內的角度增量名義值;
△T為采樣時間間隔。
圖6中,
(a)、(b)分別為并聯轉臺以 2°/s、10°/s的速度,繞X軸轉動的位置曲線;
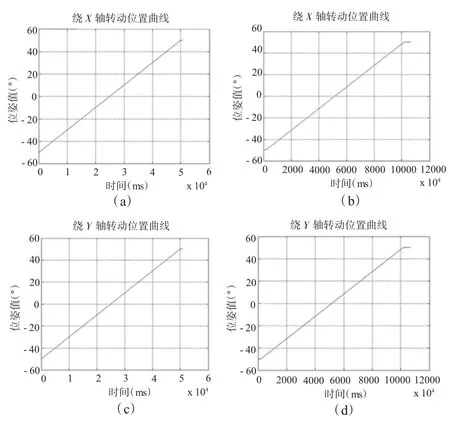
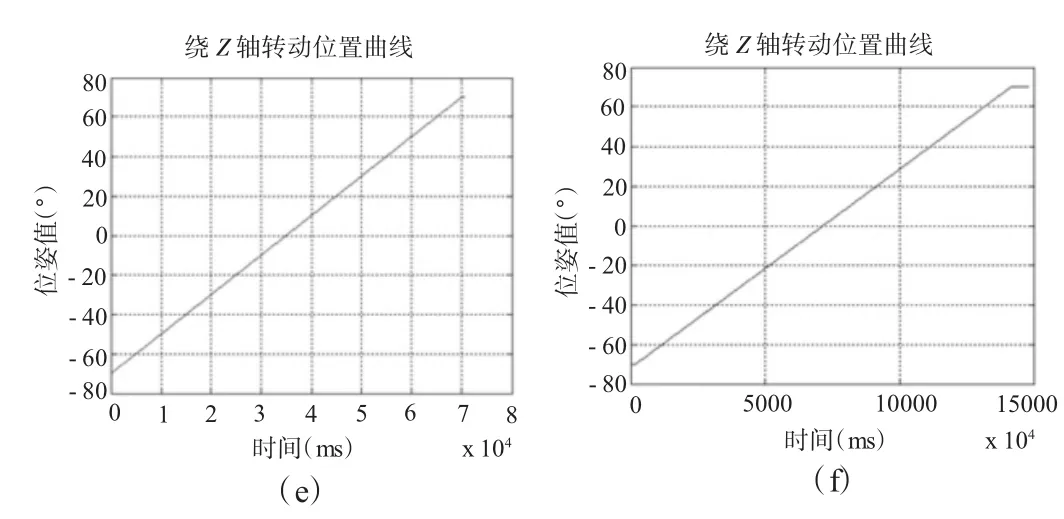
圖6 并聯轉臺以恒定速度繞各軸轉動的位置曲線
(c)、(d)分別為并聯轉臺以 2°/s、10°/s的速度,繞Y軸轉動的位置曲線;
(e)、(f) 分別為并聯轉臺以 2°/s、10°/s的速度,繞Z軸轉動的位置曲線。
經計算,當并聯轉臺分別繞X軸、Y軸、Z軸以2°/s、10°/s的速度運動時,速率精度如表2所列。
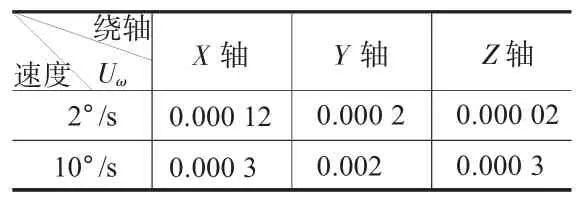
表2 各軸在不同速度下轉動的速率精度
5 結束語
從表中可以看出,轉臺繞各軸轉動的速率精度都在0.01°/s以內,滿足指標要求。通過大量的實驗證明,并聯轉臺在半徑5 m的范圍內,實時控制工作穩定、性能可靠。
[1]黃 真,孔令富,方躍華.并聯機器人機構學理論及控制[M].北京:機械工業出版社,1997.
[2]王 洋,倪雁冰,黃 田,等.球面并聯機構實時控制系統的開發[J].制造業自動化,2001,23(4):16-19.
[3]姜復興,龐志成.慣導測試設備原理與設計[M].哈爾濱:哈爾濱工業大學出版社,1998.
