船舶主機氣囊隔振技術對中控制策略研究
2012-02-13 11:57:20卜文俊
振動與沖擊 2012年8期
卜文俊,何 琳
(海軍工程大學 振動與噪聲研究所,武漢 430033)
氣囊隔振器具有固有頻率低、蠕變小等優(yōu)點。將其應用于船舶主機隔振是一條有效的低頻隔振技術途徑[1]。
由于難以有效保持裝置長期工作過程中良好的軸系對中狀態(tài),根據(jù)已查閱的文獻,將氣囊隔振器直接應用于船舶主機隔振的研究開展較少。目前船舶主機隔振系統(tǒng)普遍選用剛度相對較大的隔振器來保證裝置在外界擾動力作用下的軸系對中精度[2],但對低頻振動隔離效果并不理想。
氣囊隔振器應用于船舶主機低頻隔振難以長期保持較好的軸系對中狀態(tài)主要有兩方面原因[3]:① 固有頻率低,相比同等承載能力的其它類型隔振器具有更低的剛度,因此在外界擾動力(力矩)作用下會產(chǎn)生相對較大的變形;② 以空氣為工作介質,環(huán)境溫度變化以及長期工作過程的正常氣體泄漏均會導致囊體產(chǎn)生變形,并影響軸系對中狀態(tài)。實現(xiàn)高精度對中控制是氣囊隔振器成功應用于船舶主機低頻隔振必需突破的關鍵技術。
由于可通過氣囊隔振器工作壓力的調整實現(xiàn)其承載力的調整,因此,如果能夠研制出一套自動控制系統(tǒng)對氣囊隔振裝置實施充(放)氣控制,那么就可解決其長期工作過程中氣體泄漏及主機運行過程擾動力(力矩)對軸系對中的影響問題,從而解決船舶主機低頻隔振及軸系良好對中狀態(tài)這一矛盾。
對中控制過程可概括為:針對系統(tǒng)當前不對中狀態(tài),通過對相應氣囊隔振器充(放)氣控制來改變其當前承載力狀態(tài),以使得系統(tǒng)由當前不對中狀態(tài)遷移至下一改善的不對中狀態(tài),并最終通過一系列充(放)氣作用過程實現(xiàn)對中控制,并保持裝置承載力的均勻分配。可見,研究出優(yōu)化的對中控制氣囊隔振器充(放)氣作用調整策略(即對中控制策略)是該控制問題的關鍵。
本文控制對象屬于典型的多變量、強耦合系統(tǒng)。一方面,裝置通常由數(shù)目較多的氣囊隔振器組成,各氣囊隔振器間具有較強的耦合變形影響。另一方面,對中控制問題涉及的控制目標較多,各控制目標間耦合較強,且部分情況下可能存在相互沖突。對于該類復雜控制對象,必須建立合理的對中控制策略,以實現(xiàn)強耦合條件下的多目標協(xié)調控制,否則將難以保證控制系統(tǒng)的收斂性。
文獻[4]已開展了對中狀態(tài)監(jiān)測的相關研究。本文將在此研究基礎上,通過對控制對象的對中狀態(tài)響應特性分析,研究出對中控制策略,然后對控制策略進行試驗驗證。
1 力學特性分析
1.1 分析對象結構簡介
船舶主機氣囊隔振裝置結構示意如圖1所示。
圖中,系統(tǒng)坐標系(靜止坐標系)原點位于機器重心;氣囊隔振器以斜置角α沿y軸對稱布置。
1.2 對中狀態(tài)響應特性分析
將船舶主機視為剛體,忽略基座位移,則系統(tǒng)無阻尼六自由度運動方程表達為:
式中:M為主機的質量矩陣;X=[xgygzgθxθyθz]為描述主機重心的平動、轉動向量;K為系統(tǒng)剛度矩陣;ω為激勵力角頻率;F=[FxFyFzMx MyMz]為激勵力向量。
M、K的詳細表達式參見文獻[5]。
對中狀態(tài)響應特性是指對裝置中氣囊隔振器施加充(放)氣作用所引起的對中狀態(tài)變化。由于對中狀態(tài)響應特性分析并不關心實際動態(tài)響應過程,因此,可以“準靜態(tài)”過程進行分析,即:

同時,可將充(放)作用看成等效的靜態(tài)的外力(力矩)作用。
對中狀態(tài)響應向量A可用下式表示:

式中,Δxc為水平偏移量xc的響應;Δyc為軸向變形量yc的響應;Δzc為豎直偏移量zc的響應;Δθ為水平偏斜角θ的響應;Δφ為豎直偏斜角φ的響應;Δψ為扭轉角ψ的響應。
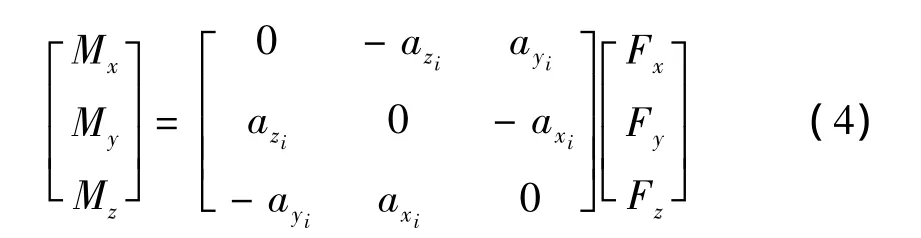
充(放)作用的等效外力、力矩具有以下關系:
可建立氣囊隔振器充(放)氣作用下裝置重心的運動響應X的計算模型:
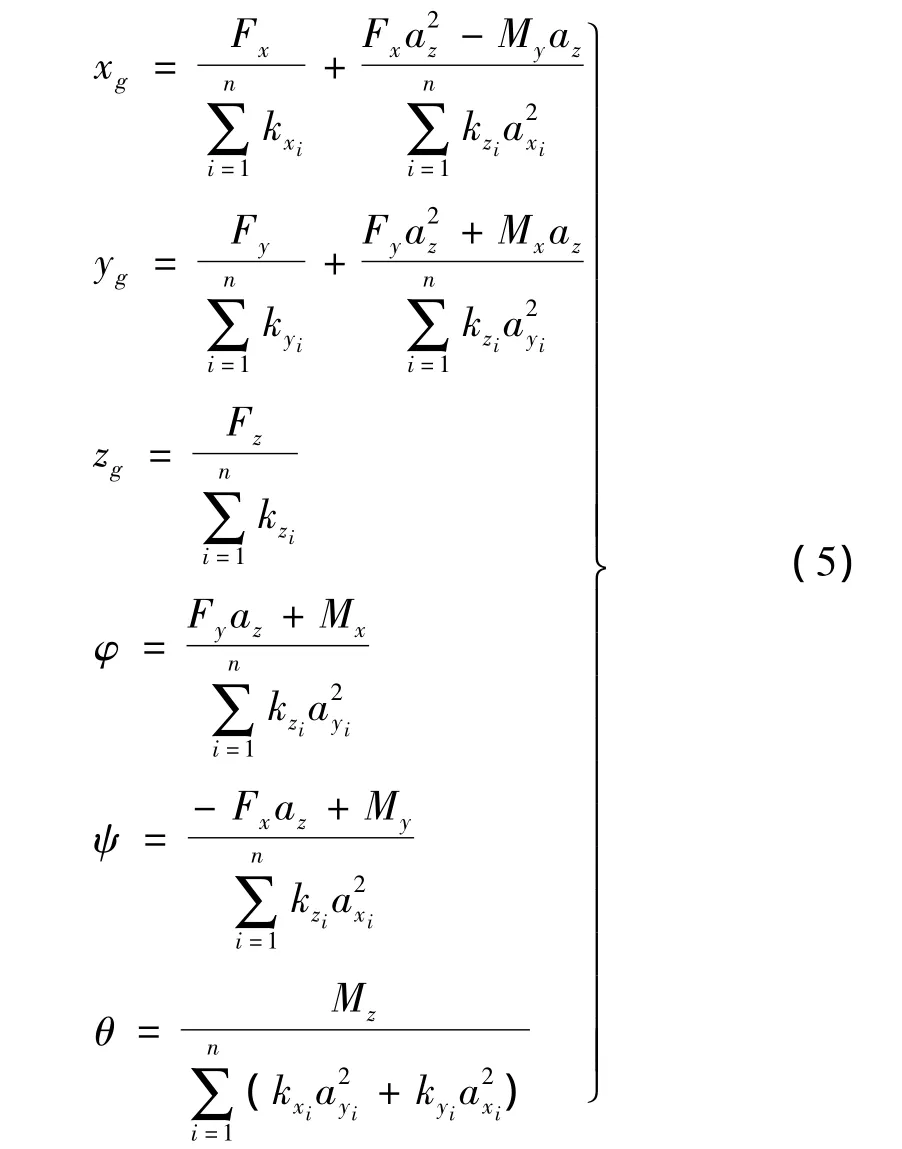
式中,i為充(放)氣作用對應的氣囊隔振器編號;n為氣囊隔振器數(shù)目;各氣囊隔振器的azi相同,取為az。
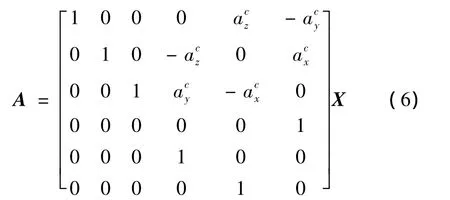
根據(jù)文獻[4]中的對中狀態(tài)監(jiān)測模型,A與X存在以下關系:
1.3 偽靈敏度分析方法
當未在軸向布置氣囊隔振器時,可以近似認為充(放)氣作用等效外力Fy為0,并且可以不考慮軸向變形量yc的控制問題[4]。
因此,對本文控制對象而言,實際的對中控制目標為:

根據(jù)氣囊隔振器承載力公式:

式中,p為氣囊工作壓力;se為氣囊隔振器有效面積。
當對某氣囊隔振器施加充(放)氣作用時,將引起其工作壓力p的增加(減少),進而引起其承載力F的增大(減小),并最終導致裝置對中狀態(tài)的變化。由于單次充(放)氣作用前后囊體產(chǎn)生的變形較小,所以分析過程可忽略有效面積se變化的影響。
將承載力變化量沿x軸、z軸方向分解可得到充(放)氣等效外力作用分量Fx、Fz。
假設對i#氣囊隔振器施加充氣作用引起工作壓力變化 Δpi,Δpi與對中狀態(tài)分量A'(j)(j=1,2,…,5)之間的靜態(tài)增益為:

由于氣體傳輸管路流量特性計算易受充(放)氣過程中氣源壓力波動、電磁閥執(zhí)行精度等因素影響,因此,準確計算出充(放)氣作用引起的氣囊工作壓力變化Δpi存在一定難度。另一方面,將實際充(放)作用等效為氣囊隔振器軸向承載力變化也在一定程度上存在近似。因此,在實際分析過程中難以得到式(5)的相關精確計算輸入?yún)?shù),即嚴格意義上的定量對中響應特性分析結果難以獲取。
假設對不同氣囊隔振器施加充(放)氣作用引起的Δpi相同,則可對計算輸入?yún)?shù)Fx、Fz進行無量綱化處理。以充氣作用為例,取充氣作用引起的軸向承載力增量為單位1,則Fx、Fz的無量綱形式如下:

符號函數(shù)sgn(axi)定義如下:

采用以上分析方法得到的盡管不是嚴格定量形式的對中狀態(tài)響應結果,但仍然可從各分量響應特性的符號性、相對量值差異兩方面來表示不同氣囊隔振器充(放)氣作用下的對中狀態(tài)響應特性差異,其分析結果同樣可作為對中控制策略制定的依據(jù)。
由于采用該計算參數(shù)輸入方法得到的并不是嚴格意義上的定量計算結果,所以稱之為偽靈敏度矩陣。
1.4 算例分析
某船舶主機氣囊隔振試驗裝置重約8.6 t,由12個額定承載力為1 t的氣囊隔振器組成,布置方式如圖1所示,斜置安裝角為30°。各氣囊隔振器布置位置(以上蓋板安裝面中心點的系統(tǒng)坐標表示)見表1。
以承載力均勻分布最優(yōu)為目標,可進行氣囊工作壓力分布設計,優(yōu)化設計方法參見文獻[7]。優(yōu)化設計后,位于x軸正半軸區(qū)域氣囊的最優(yōu)工作壓力分布(也稱理論目標壓力分布)為:

位于x軸負半軸區(qū)域內氣囊的理論目標壓力分布可根據(jù)布置位置對稱性確定。
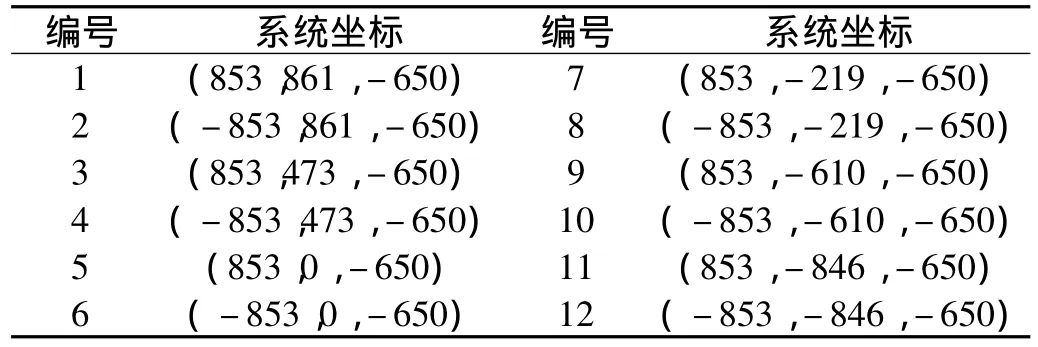
表1 氣囊隔振器布置位置Tab.1 Location of air spring
為便于反映氣囊實際工作壓力pi相對目標壓力的偏離程度,引入歸一化工作壓力系數(shù):

經(jīng)過計算,可得到該試驗裝置充(放)氣作用下的對中狀態(tài)響應偽靈敏度矩陣為:
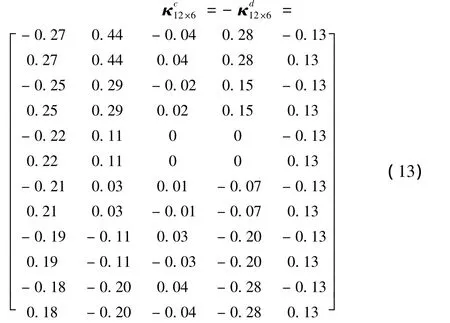
通過式(13)可知:
(1)盡管偽靈敏度矩陣未能提供嚴格意義上的定量信息,但其矩陣元素可準確反映不同氣囊隔振器充(放)氣作用下對中狀態(tài)響應特性的差異(符號性、相對量值方面);
(2)對于某一確定的不對中狀態(tài),可供選擇的充(放)氣作用氣囊并不唯一,需要引入相關約束條件才能得到最終控制策略;
(3)對任意不對中狀態(tài),并不總是存在可供選擇的氣囊使得充(放)氣作用對所有不對中分量同時產(chǎn)生趨向0值方向的變化,控制目標間具有較強耦合關系,控制策略必須能夠協(xié)調多目標控制過程。
2 對中控制策略
為使得對中控制策略具備充(放)氣控制電磁閥故障、氣囊故障情況下的容錯控制能力,分別建立當前控制時刻各氣囊隔振器的充氣作用允許標志位Ci(i=1,2,…,12)、放氣作用允許標志位Di。
Ci的判斷規(guī)則如下:對于i#氣囊隔振器,如果充氣控制電磁閥無故障且氣囊無破損故障,那么Ci=true,否則Ci=false。Di的判斷規(guī)則與之類似。
基于對中狀態(tài)響應偽靈敏度矩陣,根據(jù)“控制系統(tǒng)實現(xiàn)高精度對中狀態(tài)控制的同時,盡量保證裝置承載力的均勻分配”原則,本文建立了以下對中控制策略:
Step1. 取式(13)中各對中分量最大絕對響應,計算出各對中分量最小理論充(放)氣調整次數(shù)Nj(j=1,2,…,5),對于未超出控制精度的對中分量,取Nj=0;
Step2. 取Nj最大值對應的超標對中分量A(k)(k∈{1,2,…,5})作為當前控制目標,將多目標控制問題轉化為單目標控制;
Step5. 提取待充氣氣囊歸一化工作壓力系數(shù)最小值、待放氣氣囊歸一化工作壓力系數(shù)最大值;
Step7. 執(zhí)行機構完充(放)氣控制作用,返回Step 1,直至所有對中狀態(tài)分量均滿足控制精度要求時結束本次控制過程。
3 實驗驗證
試驗方法:以氣囊隔振裝置無氣狀態(tài)為初始試驗狀態(tài),通過對中控制系統(tǒng)將裝置調整至對中控制狀態(tài)。
偏移量控制過程如圖2所示。姿態(tài)分量控制過程如圖3所示。
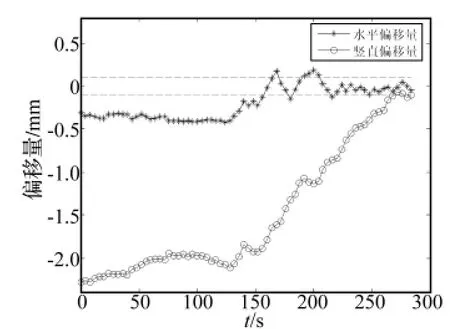
圖2 偏移量控制過程Fig.2 Control process of offset
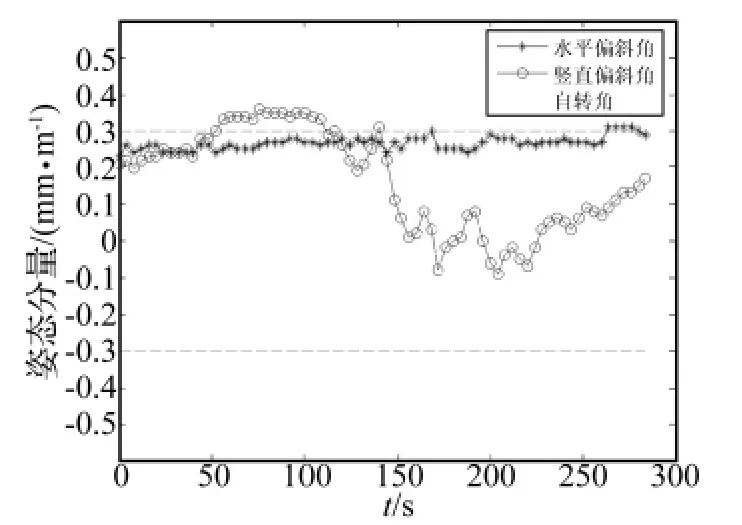
圖3 姿態(tài)分量控制過程Fig.3 Control process of attitude
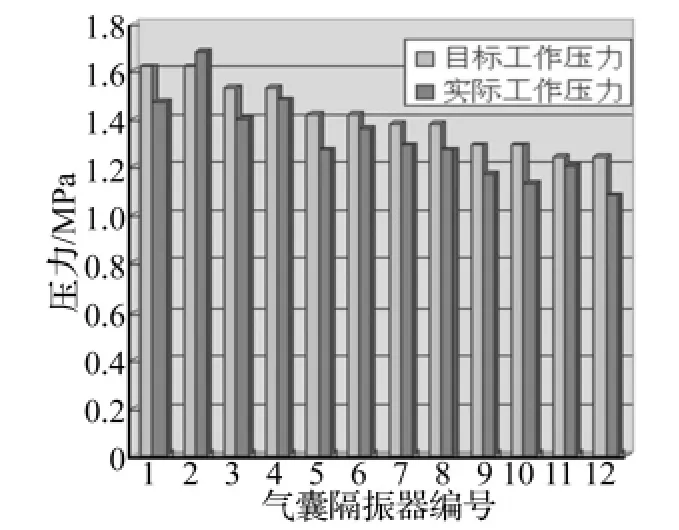
圖4 工作壓力分布對比Fig.4 Contrast of pressure distribution
通過圖2、圖3可知:
(1)對中控制策略在強耦合條件下實現(xiàn)了高精度的多目標協(xié)調對中控制,偏移量控制精度達到[-0.1,0.1]mm、姿態(tài)分量控制精度達到[-0.3,0.3]mm/m,該對中控制精度已部分達到軸系剛性對中要求[9];
(2)從無氣初始狀態(tài)至對中狀態(tài),控制系統(tǒng)所需時間約5分鐘,具有較好的動態(tài)工作性能。
(3)采用的對中狀態(tài)響應偽靈敏度分析方法,解決了計算輸入?yún)?shù)無法準確獲取的困難,并為對中控制策略提供了準確的決策信息,在工程上是可行的。
對以上試驗過程,當系統(tǒng)處于對中狀態(tài)時,實際工作壓力分布與理論目標壓力分布對比如圖4所示。
通過圖4可知,實際工作壓力與理論目標壓力分布的差異在±10%以內,考慮到理論目標壓力分布的合理計算誤差,可知該控制策略能夠使得控制系統(tǒng)同時具備良好的承載力均勻分配控制能力。
4 結論
本文建立了船舶主機氣囊隔振裝置對中狀態(tài)響應特性分析模型。針對該模型計算輸入?yún)?shù)無法準確獲取的特點,提出一種對中狀態(tài)響應偽靈敏度分析方法,并基于控制對象偽靈敏度矩陣研究出對中控制策略。試驗結果表明,建立的對中控制策略使得控制系統(tǒng)在具備高精度對中控制、較好的動態(tài)工作性能的同時,實現(xiàn)良好的裝置承載力均勻分配控制效果。該成果可有效解決氣囊隔振器應用于船舶主機低頻隔振研究中的高精度對中控制問題。
[1]朱石堅,何 琳.船舶減振降噪技術與工程設計[M].北京:科學出版社,2002.
[2]伏同先,莊國華.某潛艇推進電機隔振裝置的研制[J].艦船科學技術,1998,1:44-49.
[3] Xu W,He L,Shuai C G,et al.Stiffness calculation and dynamic simulation of air spring[C].Proceedings of the ASME International Design Engineering Techn.Conferences and Computers and Information in Engineering Conferences DETC,2005:1395-1399.
[4]卜文俊,何 琳,施 亮,等.船舶主機空氣彈簧隔振裝置輸出軸對中姿態(tài)實時監(jiān)測研究[J].振動與沖擊,2009,28(10):217-220.
[5]Harris C M,Piersol A G.Shock and vibration handbook[M].New York:McGraw-Hill,fifth edition,2002.
[6]代桂平.半Markov控制過程的性能靈敏度分析、優(yōu)化及其算法研究[D].合肥:中國科學技術大學,2004.
[7]張戰(zhàn)寧,何 琳,鮑海閣.氣囊隔振裝置壓力分布優(yōu)化控制研究[J].振動與沖擊,2007,26(9):60-62.
[8]王生龍.潛艇軸系安裝技術條件[S].中國船舶工業(yè)總公司,1993.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
廣西科技大學學報(2016年1期)2016-06-22 13:10:41
通信電源技術(2016年1期)2016-04-16 04:57:26
浙江大學學報(工學版)(2015年2期)2015-05-30 07:04:46
中國艦船研究(2014年6期)2014-05-14 06:45:22