基于EKF載波跟蹤環(huán)路的INS輔助性能分析?
2012-02-09 01:57:16宋高順王昌明奚芳華張愛軍
測(cè)試技術(shù)學(xué)報(bào) 2012年4期
關(guān)鍵詞:信號(hào)
宋高順,王昌明,奚芳華,張愛軍
(南京理工大學(xué)機(jī)械工程學(xué)院精密儀器系,江蘇南京 210094)
0 引 言
衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)和慣性導(dǎo)航系統(tǒng)的優(yōu)缺點(diǎn)有著很強(qiáng)的互補(bǔ)性,將兩個(gè)導(dǎo)航系統(tǒng)進(jìn)行組合,可以大大提高其在導(dǎo)航方面的性能.GNSS和 INS在組合方式上分為松組合、緊組合和超緊組合三種方式.由于松組合和緊組合實(shí)現(xiàn)簡(jiǎn)單,對(duì)硬件系統(tǒng)改動(dòng)較小,因此這兩種方式的研究開發(fā)比較早,在許多方面已經(jīng)有應(yīng)用[1-2].
近些年來,隨著軟件接收機(jī)技術(shù)的發(fā)展[3],超緊組合的方式成為組合導(dǎo)航中研究的重點(diǎn).超緊組合主要是對(duì)GPS接收機(jī)內(nèi)部進(jìn)行重新編排,利用INS對(duì)接收機(jī)的運(yùn)動(dòng)狀態(tài)進(jìn)行測(cè)量,對(duì)衛(wèi)星信號(hào)的跟蹤環(huán)路進(jìn)行輔助.采用這種輔助的形式可以抵消由于接收機(jī)運(yùn)動(dòng)所產(chǎn)生的衛(wèi)星信號(hào)頻移,從而降低跟蹤環(huán)路的帶寬,提高跟蹤環(huán)路的跟蹤精度[4].
在傳統(tǒng)的INS輔助跟蹤環(huán)路中,由于INS測(cè)量值存在誤差,跟蹤環(huán)路不能完全對(duì)信號(hào)的多普勒頻移進(jìn)行補(bǔ)償,跟蹤環(huán)路中必然存在跟蹤誤差.如果要降低環(huán)路中的跟蹤誤差則需要選用高精度的INS進(jìn)行組合,然而高精度的INS價(jià)格十分昂貴,這必將導(dǎo)致系統(tǒng)的成本增加,降低超緊組合的實(shí)用性.
文獻(xiàn)[5]提出了一種SINS輔助GPS超緊組合導(dǎo)航方案,并對(duì)輔助的穩(wěn)定性和精度進(jìn)行了仿真分析;文獻(xiàn)[6]分析了INS輔助GPS跟蹤環(huán)路在動(dòng)態(tài)環(huán)境下的動(dòng)態(tài)殘留及其對(duì)環(huán)路相位誤差的影響;文獻(xiàn)[7]研究了超緊組合中提升IMU輔助的方法.本文主要對(duì)超緊組合中基于EKF的跟蹤環(huán)路進(jìn)行設(shè)計(jì),研究在該環(huán)路中不同精度的INS對(duì)跟蹤環(huán)路噪聲的影響.
1 INS輔助跟蹤環(huán)路
1.1 載波跟蹤環(huán)路
GPS接收機(jī)的載波跟蹤環(huán)路通常由4部分組成:載波預(yù)檢測(cè)積分器、載波環(huán)鑒相器、載波環(huán)濾波器和數(shù)控振蕩器(NCO),如圖1所示.其中預(yù)檢測(cè)積分器的積分時(shí)間可以設(shè)置,其大小決定著跟蹤環(huán)路的動(dòng)態(tài)性能和環(huán)路對(duì)噪聲的抑制性能[8];載波環(huán)鑒相器實(shí)現(xiàn)對(duì)接收機(jī)信號(hào)估計(jì)值和信號(hào)接收值之間誤差的測(cè)量,選擇不同的鑒相器就會(huì)產(chǎn)生不同的載波跟蹤環(huán)路,即鎖相環(huán)(PLL),鎖頻環(huán)(FLL);載波環(huán)濾波器對(duì)鑒相器的輸出值進(jìn)行濾波處理,載波環(huán)濾波器通常為1階、2階的低通濾波器,不同階數(shù)的濾波器決定著環(huán)路對(duì)動(dòng)態(tài)信號(hào)的跟蹤性能;NCO根據(jù)濾波器的輸出,對(duì)估計(jì)頻率進(jìn)行修正,實(shí)現(xiàn)對(duì)接收信號(hào)的跟蹤.載波跟蹤環(huán)路的跟蹤誤差為[9]

式中:σPLL表示載波環(huán)路跟蹤噪聲;σtPLL表示1σ熱噪聲,與環(huán)路帶寬、預(yù)檢測(cè)積分時(shí)間、載噪比等有關(guān);σv和θA分別表示1σ由振動(dòng)引起的振蕩器顫動(dòng)和由阿倫偏差引起的振蕩器顫動(dòng),與環(huán)路階數(shù)、環(huán)路帶寬以及振蕩器性能等有關(guān);θe表示動(dòng)態(tài)應(yīng)力誤差,與環(huán)路階數(shù)、環(huán)路帶寬、動(dòng)態(tài)情況有關(guān)[10].
載波跟蹤環(huán)路中,降低環(huán)路熱噪聲和提高環(huán)路的動(dòng)態(tài)跟蹤性能之間存在矛盾,需要合理的選擇環(huán)路濾波參數(shù)以滿足二者的要求.對(duì)于2階環(huán)路濾波器,環(huán)路帶寬參數(shù)一般選取12~18 Hz,以滿足一般應(yīng)用環(huán)境的需要;3階環(huán)路濾波器雖然能夠降低動(dòng)態(tài)誤差,但3階環(huán)路濾波器不能無條件穩(wěn)定,且設(shè)計(jì)復(fù)雜.
1.2 INS輔助跟蹤環(huán)路
超緊組合跟蹤環(huán)路結(jié)構(gòu)如圖2所示.在超緊組合跟蹤環(huán)路中,INS的引入可以對(duì)信號(hào)的多普勒頻移進(jìn)行估計(jì),有效地對(duì)接收機(jī)運(yùn)動(dòng)狀態(tài)進(jìn)行補(bǔ)償.接收機(jī)可以工作在2階跟蹤環(huán)路中,且跟蹤帶寬可以降低到3Hz,在提高環(huán)路對(duì)動(dòng)態(tài)信號(hào)跟蹤能力的同時(shí),大大降低了環(huán)路中的熱噪聲.
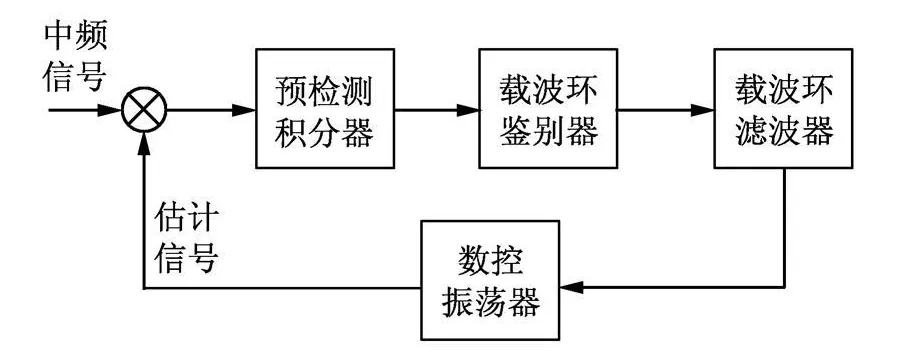
圖1 傳統(tǒng)載波跟蹤環(huán)路框圖Fig.1 Trad itional carr ier tracking loop architecture
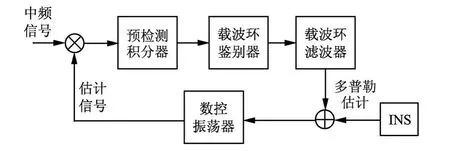
圖2 INS輔助跟蹤環(huán)路框圖Fig.2 INS-assisted-based tracking loop architecture
由于INS的測(cè)量存在誤差,INS的多普勒估計(jì)值并不能完全反映動(dòng)態(tài)情況下信號(hào)的多普勒頻移,因此,跟蹤環(huán)路的跟蹤誤差也受到INS精度的影響.本文主要分析不同精度的 INS的輔助性能,只考慮INS測(cè)量誤差對(duì)跟蹤環(huán)路的影響,C/A碼和數(shù)據(jù)碼認(rèn)為已經(jīng)鎖定.因此載波跟蹤環(huán)路的中頻信號(hào)為

式中:A表示信號(hào)幅值;fIF表示中頻信號(hào)頻率;fD表示信號(hào)的多普勒頻移值;φ表示信號(hào)的相位.數(shù)控振蕩器會(huì)產(chǎn)生兩個(gè)估計(jì)信號(hào)與中頻信號(hào)混頻,在超緊組合中混頻的頻率由 INS和鑒別器的輸出共同決定.則數(shù)控振蕩器輸出信號(hào)為

式中:fINS表示INS對(duì)多普勒頻移的估計(jì)值,由于存在誤差,因此

式中:fDbias表示由于 INS的精度所導(dǎo)致的多普勒頻移估計(jì)誤差.因此跟蹤環(huán)路中頻率跟蹤誤差為

對(duì)于二階跟蹤環(huán)路,由INS誤差所導(dǎo)致的跟蹤環(huán)路動(dòng)態(tài)應(yīng)力誤差可表示為

式中:δa表示INS在衛(wèi)星與接收機(jī)的基線上的加速度測(cè)量誤差;ωL表示二階跟蹤環(huán)路的自然角頻率;λ表示衛(wèi)星信號(hào)載波波長(zhǎng).
2 EKF跟蹤環(huán)路設(shè)計(jì)
通常情況下,環(huán)路中NCO在環(huán)路濾波器輸出的驅(qū)動(dòng)下對(duì)估計(jì)信號(hào)進(jìn)行調(diào)整,以保持對(duì)輸入信號(hào)的跟蹤.但是在超緊組合系統(tǒng)中,跟蹤的環(huán)路帶寬一般只有3~5H z,當(dāng)INS輔助的多普勒頻移信息與信號(hào)的實(shí)際多普勒頻移有誤差時(shí),跟蹤環(huán)路的穩(wěn)定性很容易出現(xiàn)惡化.若要選擇高精度的INS對(duì)環(huán)路進(jìn)行輔助,必然會(huì)帶來成本的增加.考慮到預(yù)檢測(cè)積分器輸出的觀測(cè)量為非線性的,本文提出基于EKF的跟蹤環(huán)路,降低 INS輔助精度對(duì)環(huán)路跟蹤精度的影響,環(huán)路的結(jié)構(gòu)如圖3所示.
在載波環(huán)路中,采用EKF替換載波環(huán)鑒相器可以更好地對(duì)預(yù)檢測(cè)積分器輸出量進(jìn)行濾波估計(jì),降低INS輔助精度對(duì)環(huán)路跟蹤精度的影響,增加環(huán)路的穩(wěn)定性[11].預(yù)檢測(cè)積分器的輸出結(jié)果被送進(jìn)Kalman濾波器中,Kalm an濾波器選用非線性濾波器EKF,如果直接采用KF則需建立線性的觀測(cè)方程,必然會(huì)產(chǎn)生觀測(cè)誤差,導(dǎo)致觀測(cè)噪聲加大,嚴(yán)重時(shí)導(dǎo)致濾波發(fā)散.濾波器估計(jì)出載波跟蹤的相位誤差δφ和頻率誤差 δf,用于驅(qū)動(dòng)載波跟蹤數(shù)控振蕩器.通道濾波器的狀態(tài)向量可以表示為[12]

式中:δφ表示環(huán)路相位偏差;δf表示環(huán)路頻率偏差;δa表示INS在接收機(jī)和衛(wèi)星基線上的加速度輔助偏差.
通道濾波器的狀態(tài)方程可以表示為

式中:狀態(tài)轉(zhuǎn)移矩陣B為
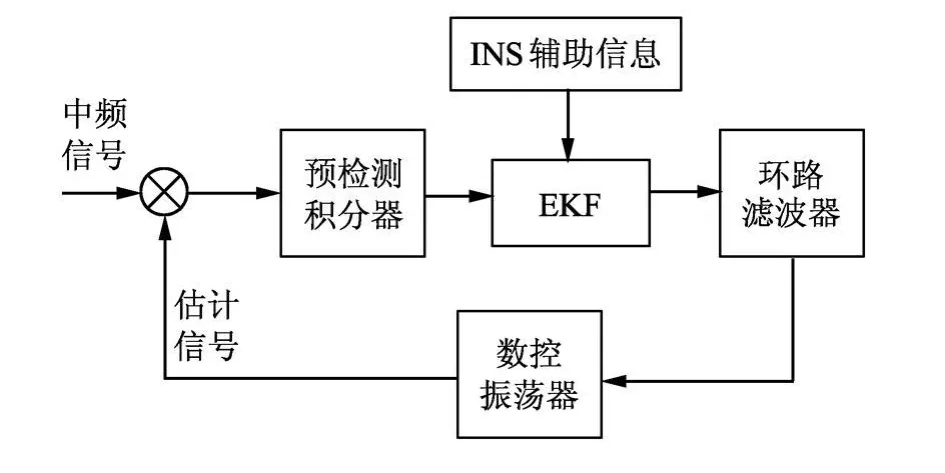
圖3 基于EKF載波跟蹤環(huán)路框圖Fig.3 EKF-based car rier tracking loop architecture

式(10)~(12)中,Δt表示積分預(yù)處理時(shí)間;ωφ表示載波相位跟蹤噪聲;ωf表示多普勒頻移跟蹤噪聲;ωa表示多普勒變化率跟蹤噪聲,此處均簡(jiǎn)化為高斯白噪聲.
濾波器的觀測(cè)量是跟蹤環(huán)路的預(yù)檢測(cè)積分輸出

3 仿真分析
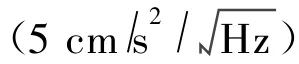
圖4中在微慣導(dǎo)級(jí)INS輔助情況下的跟蹤誤差為2.91°,因?yàn)椴捎玫氖?階環(huán)路,由于加速度計(jì)的偏差,在跟蹤環(huán)路中形成了穩(wěn)態(tài)誤差;在戰(zhàn)術(shù)級(jí)INS輔助情況下的跟蹤誤差為 1.22°,由于戰(zhàn)術(shù)級(jí) INS的測(cè)量精度高,因此產(chǎn)生的跟蹤誤差較小,且穩(wěn)態(tài)誤差并不明顯,證明了高精度的 INS能夠提高對(duì)環(huán)路的輔助能力.圖5中微慣導(dǎo)級(jí)INS和戰(zhàn)術(shù)級(jí)INS的輔助跟蹤誤差分別為0.72°和 0.59°,兩種情況下的跟蹤精度均遠(yuǎn)高于傳統(tǒng)INS輔助環(huán)路中相位跟蹤的精度,且微慣導(dǎo)級(jí) INS和戰(zhàn)術(shù)級(jí)INS之間的跟蹤誤差也較小.也就是說在基于EKF的跟蹤環(huán)路,在提高跟蹤環(huán)路精度的同時(shí),能夠有效地降低系統(tǒng)對(duì)INS精度的依賴,提高了低精度的INS對(duì)環(huán)路輔助的性能.

圖4 INS輔助環(huán)路相位跟蹤誤差Fig.4 Phase track ing errors of INS-assisted loop
圖5 基于 EKF的 INS輔助環(huán)路相位跟蹤誤差Fig.5 Phase tracking errors of INS-assisted loop based on EKF
4 結(jié) 論
傳統(tǒng)的 INS輔助跟蹤環(huán)路的結(jié)構(gòu)輔助效果依賴于INS的精度,低精度的 INS使系統(tǒng)工作在次優(yōu)的跟蹤狀態(tài)下,影響跟蹤的精度和穩(wěn)定性;高精度的INS必然帶來成本的增加.針對(duì)這一問題,本文提出的基于EKF的INS輔助跟蹤環(huán)路的結(jié)構(gòu),用于改善傳統(tǒng)輔助環(huán)路中存在的問題.通過仿真證明,該結(jié)構(gòu)可以有效地降低系統(tǒng)對(duì)INS精度的要求,提高了低精度的 INS對(duì)環(huán)路輔助的性能.該論文研究?jī)?nèi)容為低成本的INS應(yīng)用于超緊組合系統(tǒng)提供了一定的參考.
[1] 周坤芳,吳日希,孔鍵.緊耦合GPS/INS組合特性及其關(guān)鍵技術(shù)[J].中國慣性技術(shù)學(xué)報(bào),2009,17(1):42-45.
Zhou Kunfang,Wu Xi,Kong Jian.Modular characteristics and key technology of tightly-coup led GPS/INS[J].Journalof Chinese Inertial Technology,2009,17(1):42-45.(in Chinese)
[2] Jovanceivic A,Brown A,Gangu ly S,et al.U ltra tight coupling imp lementation using real time software receiver[C].Pro-ceedings of ION GNSS 2004,Rotterdam,The Netherlands,Institute of Navigation,2004:1575-1586.
[3] 徐曉蘇,范金洋.GPS軟件接收機(jī)捕獲算法[J].中國慣性技術(shù)學(xué)報(bào),2009,17(2):165-169.
Xu Xiaosu,Fan Jinyang.Acquisition algorithm of GPSsoftw are receiver[J].Journal of Chinese Inertial Technology,2009,17(2):165-169.(in Chinese)
[4] Alban S,Akos D,Rock S,et al.Performance Analysis and A rchitectures for INS-Aided GPS Tracking Loops[C].NTM,Anaheim,Institute of Navigation,2003:611-622.
[5] 于潔,王新龍.SINS輔助GPS跟蹤環(huán)路超緊耦合系統(tǒng)設(shè)計(jì)[J].北京航空航天大學(xué)學(xué)報(bào),2010,36(5):606-609.
Yu Jie,Wang Xinlong.U ltra-tightly coup led navigation system design based on SINSaiding GPS tracking loop[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(5):606-609.(in Chinese)
[6] 董曉明,孫迅.GPS/INS超緊耦合方法及其應(yīng)用分析[J].遙測(cè)遙控,2010,31(6):6-10.
Dong Xiaom ing,Sun Xun.GPS/INS Ultra-tightly coupled technique and its application analysis[J].Journal of Telemetry,Tracking and Command,2010,31(6):6-10.(in Chinese)
[7] Babu R,Wang J.Improving the Quality of IMU-Derived Doppler Estimates for U ltra-Tight GPS/INS Integration[C].GNSS 2004,Rotterdam,The Netherlands,Institute of Navigation,2004:144-152.
[8] Tao Lin,Cillian O'D risco ll,Gérard Lachapelle.Development of a Contex t-Aware Vector-Based High-Sensitivity GNSS Softw are Receiver[C].ITM 2011,San Diego,CA,2011:24-26.
[9] Elliott D Kap lan,Christopher J.GPS原理與應(yīng)用[M].寇艷紅,譯.第2版.北京:電子工業(yè)出版社,2007:299-312.
[10] 丁繼承.弱信號(hào)條件下GPS接收機(jī)關(guān)鍵技術(shù)研究[D].哈爾濱:哈爾濱工程大學(xué),2009.
[11] Petovello M,Lachapelle G.Comparison of Vector-Based Software Receiver Implementations with App lication to U ltra-Tight GPS/INS Integration[C].Proceedings of ION GNSS 2006,FortWorth TX,2006:2977-2989.
[12] Tao Li.Use of Wheel Speed Sensors to Enhancea Reduced IM U U ltra-TightGNSSReceiver[D].Calgary:University of Calgary,2009.
[13] Petovello M,Driscoll CO,LachapelleG.Weak Signal Carrier Tracking ofW eak Using Using Coherent Integration with an U ltra-Tight GNSS/IMU Receiver[C].Proceedings of European Navigation Con ference,Toulouse,2008:1-11.
[14] Dan KaiBorre.軟件定義的GPS和伽利略接收機(jī)[M].楊東凱,張飛舟,張波,譯.北京:國防工業(yè)出版社,2009.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06