多功能內置式IRIG-B碼終端設計
2012-01-29 07:19:46劉維京
電子設計工程 2012年13期
劉維京
(92941部隊93分隊 遼寧 葫蘆島 125001)
武器裝備靶場試驗時需多臺/套測控設備[1](測量與控制設備的簡稱)參加,不同測控設備獲得的試驗數據在時間上密切相關。因此,要求參試測控設備(有時包括被試裝設備)在時間統一信號[2](簡稱時統信號。是各種時間編碼信號、各種頻率定時信號和時標信號的統稱)協調下工作。為了保證各參試測控設備時鐘同步,靶場除設置時統中心站[3]外,一般需根據參試測控設備、被試裝設備投入情況,設置多個時統分站[3]。時統分站通過通信線路和時間碼與時統中心站聯系,并與時統中心站保持頻率和時間同步,再向用戶(測控設備或被試裝設備)提供標準時間和標準頻率信號。試驗過程中由時統中心站接收國家授時臺發播的時間標準進行對時[3],并向時統分站送出對時、校頻信號,統一靶場時間[2]。
隨著靶場時統設備[3](時間統一設備的簡稱。產生與輸出各種時間編碼、定時信號和接授時間碼對時同步的設備,包括時碼鐘、時統中心控制臺等)采用GPS時間作為時間標準,在測控設備中采用GPS授時技術自主同步靶場時間的條件已經成熟,研究基于GPS衛星時間的IRIG-B碼終端設備十分必要。
1 靶場測控設備同步技術現狀
靶場測控設備經歷了脈沖形式時統信號同步,IRIG-B時間碼[3](以下簡稱IRIG-B碼)同步,GPS衛星時間同步等階段。脈沖同步信號傳輸距離有限,抗干擾能力弱,不能提供絕對時間信息,測控設備在試驗飛機或艦船上安裝時需采用電臺傳送時統信號。此種同步模式在測控系統內部設備間同步采樣時仍普遍采用。
IRIG-B碼是IRIG(美國靶場時間測量組)制訂的一種串行BCD調制時間碼[4-5]。IRIG-B時間編碼信息為天、時、分、秒,碼元速率為100脈沖/s,時幀周期為1 s,秒標志和位置識別符脈沖寬度為 8 ms,“1”碼寬度為 5 ms,“0”碼和索引計數符脈沖寬度為2 ms。幅度調制的載波頻率為1 kHz,無載波調制時稱直流(DC)碼,有載波調制時稱交流(AC)碼。測控設備在試驗飛機或艦船上安裝時仍需采用電臺傳送IRIG-B碼信號,此種同步模式目前在靶場測控設備中普遍采用。
GPS衛星時間是導航、遙測及精確時間傳遞等領域的時間基準[6]。在需要準確時間的系統上加裝GPS衛星時間的采集和本地時間校準裝置,便可使系統時間始終與GPS衛星時間同步。GPS接收機不受時間、地點和氣候的限制,只要能同時接收4顆以上衛星信號即可提供高精度、連續實時授時信息。GPS衛星時間目前已成為公認的一種時間基準,已開始在靶場測控設備中得到應用。
2 總體設計
2.1 終端組成
IRIG-B碼終端設計為PCI總線結構形式,GPS OEM模塊固定在PCI卡上。終端由GPS OEM模塊,IRIG-B碼采集模塊,IRIG-B碼產生模塊等組成,其組成如圖1所示。
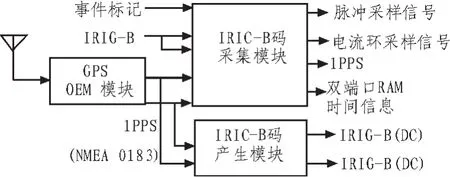
圖1 多功能內置式IRIG-B碼終端組成框圖Fig.1 Framework of multi-function built-in IRIG-B code terminal
2.2 終端功能
1)GPS衛星時間同步;
2)IRIG-B 碼同步;
3)IRIG-B 碼產生;
4)提供脈沖形式、電流環形式同步采樣信號;
5)提供事件標記中斷時間。
2.3 終端工作過程
終端插入測控設備計算機擴展槽,控制計算機加電后8031、8751復位。控制計算機通過對終端編程實現同步模式選擇,通過編程實現同步采樣信號頻率修改。
選擇GPS衛星時間同步模式時,GPS接收信號穩定后終端對外輸出同步采樣信號。選擇IRIG-B碼同步模式時,大約1秒終端對外輸出同步采樣信號。
事件標記中斷出現時終端提供中斷時刻時間信息。
GPS衛星時間同步時,對外輸出基于GPS衛星時間的IRIG-B碼時間信號,提供相當于靶場時統分站的功能。
3 詳細設計
3.1 IRIG-B碼采集模塊設計
IRIG-B碼采集模塊結構如圖2所示。8751單片機[5]內部有4 kB的EPROM存貯器,片內EPROM已存入終端工作程序。當選擇IRIG-B碼同步時,B碼時間的檢測由8751和一組并行十進制計數器完成。當終端選擇GPS衛星時間同步時,秒以下時間信息的產生與選擇IRIG-B碼同步時一致,秒以上時間從NMEA 0183[6]報文獲得(RS-232接口)。
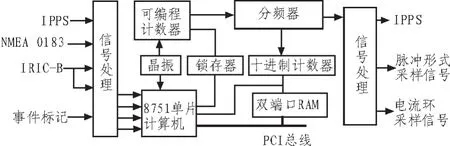
圖2 IRIG-B碼采集模塊結構Fig.2 Construction of ERIG-B code sampling model
8751 P0端口和P2端口用作地址總線和數據總線,P1端口的P1.1接收IRIG-B碼,P1.2接收事件標記,P1.0用于精確計時計數器修正量的置入。P3.0用于接收GPS衛星時間報文[7],P3.2用于B碼每個碼元的中斷INT0;P3.3用作外部中斷(INT1)入口,用于接收GPS 1PPS作為GPS衛星時間報文的基準。定時器0用作定時中斷產生,用于B碼檢測;定時器1用作串行口波特率發生器。
可編程計數器用于時間量的精確計時[8],最大計數值1 s。為使計數器和IRIG-B碼同步,需對計數器初值進行修正。修正量可通過理論計算或實測得到,并由8751寫入鎖存器。當8751檢測到IRIG-B碼參考標志時,P1.0端發出一個置入脈沖,將鎖存器中的修正量置入計數器,達到同步目的。
IRIG-B碼檢測和時間信息的讀出由軟件完成,IRIG-B碼同時接到P1.1和INT0(P3.2),每個碼元脈沖前沿均引起一次中斷,進入中斷后由軟件判斷碼元脈沖寬度,當連續檢測到2個8 ms寬碼元時,即表示檢測到IRIG-B碼參考標志,在P1.0端口發出一個計數器修正量置入脈沖,之后進入數碼判讀程序。在數碼碼元位置檢測到5 ms寬碼元時記作“1”,檢測到2 ms寬的碼元時記作“0”。
B碼采集模塊設置一組分頻器用于產生各種頻率采樣信號,分頻器的輸入是時間計數器輸出的100 kHz脈沖,通過分頻器輸出不同頻率脈沖形式同步采樣信號和電流環形式同步采樣信號。
當選擇GPS衛星時間同步時,秒以上時間信息從GPS OEM模塊NMEA 0183報文獲得,秒以下時間信息從六位十進制計數器的高四位中讀出。兩部分時間信息合并組成當前時間信息,并自動寫入雙端口RAM供控制計算機讀取。當選擇IRIG-B碼同步時,秒以上時間信息的檢出每秒一次,秒以下時間信息的獲得同GPS衛星時間同步模式。
3.2 IRIG-B碼產生模塊設計
IRIG-B碼產生模塊與GPS OEM模塊的連接如圖3所示。利用GPS OEM接收機輸出的NMEA 0183報文和外部1PPS信號得出GPS時間的年、月、日、時、分、秒信息,分別作為IRIG-B碼產生模塊的時間編碼信息和1PPS標準時間信號。對外部5 MHz進行隔離、放大、分頻得到1 MHz頻率信號,再將1 MHz頻率信號分別送2 ms、5 ms、8 ms產生模塊,由2 ms、5 ms、8 ms產生模塊分別對 1 MHz頻率信號進行500、200、125分頻,產生頻率為100 Hz、脈沖寬度分別為2 ms、5 ms、8 ms時鐘信號。
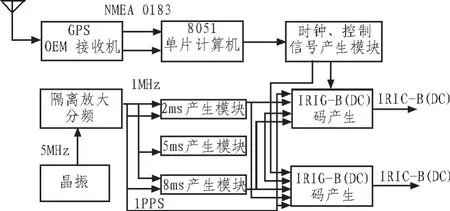
圖3 IRIG-B碼產生模塊原理框圖Fig.3 Principle gramework of IRIG-B code model
8051根據年、月、日、時、分、秒信息和標準1PPS信號,控制兩路IRIG-B(DC)碼產生模塊產生IRIG-B(DC)碼信號。供戰位附近其他測控設備與靶場時間同步時使用。
3.3 軟件模塊設計
軟件采用模塊化結構,由主程序如圖4所示、B碼中斷服務程序如圖5所示、定時器0中斷服務等程序如圖6所示組成。
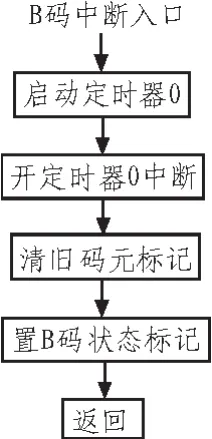
圖5 B碼中斷服務程序流程圖Fig.5 Flow chart of B code interrupt service routine
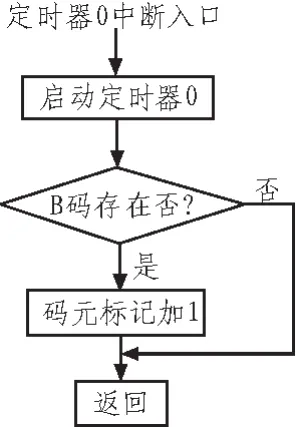
圖6 定時器O中斷服務程序流程圖Fig.6 Flow chart of timer O interupt service routine
1)主程序
控制計算機加電后8751復位,主程序對串行口初始化,取計數修正量并開中斷。根據中斷程序設置的狀態位判斷本IRIG-B碼碼元是“0”或是“1”、還是B碼同步頭(標志碼)。一幀IRIG-B碼結束后讀取瞬時時間并送雙端口RAM,然后進行下一幀的檢測。
2)IRIG-B碼中斷服務程序
每個IRIG-B碼脈沖前沿均引起一次中斷,進入中斷后由軟件判斷碼元脈沖寬度,當連續檢測到2個8 ms寬碼元時,即表示檢測到了IRIG-B碼標志。在P1.0端口發出一個計數器修正量置入脈沖,之后進入數碼判讀程序。檢測到5 ms寬碼元時記作“1”,檢測到2 ms寬碼元時記作“0”。
3)定時器0中斷服務程序
定時器0中斷是定時器0的溢出中斷,用于判斷B碼是否存在,此中斷只置中斷次數標記。
4)事件標記
事件標記用于確定重要事件發生時的絕對時間。如彈動時間,導彈起飛時間等。終端可將事件出現時間寫入雙端口RAM,供控制計算機讀取。
4 結束語
靶場測控設備普遍采用GPS衛星時間自主同步后,不用再在試驗現場設置時統分站,免除在試驗飛機、艦船、車輛等載體上加裝時統設備。有利于減少參試兵力,方便試驗組織與指揮,提高試驗綜合效益。
[1]楊榜林.軍事裝備試驗學[M].北京:國防工業出版社,2002.
[2]童寶潤.時間統一技術[M].北京:國防工業出版社,2004.
[3]魯培耿.海軍裝備試驗常用詞典[M].北京:國防工業出版社,2007.
[4]邴志光,束坤,顧燕飛.IRIG-B碼在時間同步系統中的應用[J].現代電子技術,2012(7):16-18.BING Zhi-guang,SHU Kun,GU Yan-fei.Application of IRIG-B code in time synchronization system[J].Modern Electronic Technique,2012(7):16-18.
[5]龐吉耀.基于FPGA的IRIG-B編碼器實現[J].現代電子技術,2009(24):113-117.PANG Ji-yao.Implementation of IRIG-B encoder based on FPGA[J].Modern Electronic Technique,2009(24):113-117.
[6]劉旭東.衛星通信技術[M].北京:國防工業出版社,2003.
[7]胡漢才.單片機原理及其接口技術[M].2版.北京:清華大學出版社,2004.
[8]周明光.計算機測試系統原理與應用[M].-北京:電子工業出版社,2005.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00