一種微型燃氣輪機抗擾控制器設計及驗證方法
2012-01-25 07:43:44段建東孫力趙克吳鳳江王要強
電機與控制學報 2012年6期
段建東,孫力,趙克,吳鳳江,王要強
(哈爾濱工業大學 電氣工程系,黑龍江 哈爾濱150001)
0 引言
微燃機具有功率密度大、高效率、低排放等特點,近年來得到迅速發展,國內外學者在這一領域進行了卓有成效的研究[1-3]。微燃機控制器是決定系統性能的主要部件之一,在產品的研制階段直接利用實際系統調試會造成局部過熱、轉子變形等損害甚至發生火災、飛車等重大事故,因此有必要研究微燃機的動態模擬系統,用于控制器的設計和性能驗證。
由于研究目的不同,文獻中微燃機數學模型復雜程度存在較大差異。較復雜的模型是考慮部分工況的非線性模型,用于研究微燃機的機械特性和熱力學特性[4-6],對于控制器設計使用較多的是額定工況下的小擾動模型[7-10]。本文在 Rowen模型基礎上建立了微燃機穩態工作點處小擾動模型。經分析發現變頻器驅動異步電機調速系統具有與微燃機近似的動態模型。基于動態模型相似性對異步電機調速系統進行調整使其與微燃機控制系統具有相同的模型結構。因此可以利用微燃機模擬系統進行控制器設計和性能驗證,無疑這種方案既安全又可以在短時間內重復試驗[11-14]。
此外由于實際系統軸系的轉動慣量較大,負載擾動導致轉速的變化需要較長時間,顯然基于轉速誤差的調節器輸出會明顯滯后,因此,造成系統動態調節時間長、轉速波動大、抗負載擾動能力差等問題。本文提出的負載前饋控制基于模型分析找到了解決辦法,使負載的變化直接影響燃料的大小,縮短了調節時間、增強了抗負載擾動的能力。利用Matlab進行了仿真,最后在模擬系統實驗平臺上進行了驗證。
1 微型燃氣輪機動態模型
系統的啟動和停機是轉速開環控制,在穩態工作點附近切入轉速閉環調節,因此建立的動態模型適用于穩態工作點附近而不包括系統啟停的大動態過程。假設穩態下空氣流量不變,溫度環不起作用,暫不考慮負載擾動,則系統動態模型框圖如圖1所示。其中Gω(s)是速度調節器傳函;燃料伺服系統近似為一階慣性環節,時間常數為τf;燃燒室為純滯后延時環節,時間常數為 τB;壓氣機等效為具有增益的一階慣性環節,Kk為增益系數,τk為時間常數;透平的輸出轉矩為TT(s)=f1(s)=K1W'f(s)+K2ω(s),K1為與燃料相關系數,K2為與轉速相關系數,W'f(s)為透平等效燃料輸入;TL(s)是負載轉矩;軸系為積分環節,Jr為軸系的轉動慣量[15-18]。
在穩態工作點附近令TL(s)=0,則可求出透平等效燃料輸入W'f(s)和轉子角頻率ω(s)之間的傳遞函數為
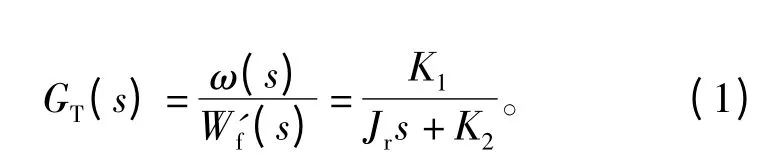
燃料伺服系統和壓氣機小慣性環節可以用一個慣性環節來等效,則系統開環傳遞函數可表示為

式中:Kr=K1Kk/K2為被控對象總增益;τ1=τf+τk為燃料伺服系統和壓氣機的總慣性時間常數;τ2=Jr/K2為透平軸系的慣性時間常數;τB為燃燒室純滯后延時時間常數。

圖1 微燃機動態結構Fig.1 Dynamic structure of micro-turbine
2 模擬系統動態模型及控制律設計
2.1 模擬系統動態模型
在模擬系統中用異步電機模擬微燃機透平,用變頻器模擬壓氣機和燃料伺服系統的慣性環節,用數字延時環節代替燃燒室。設定系統的穩態工作點為2 000 r/min,轉速調節器輸出經限幅環節和D/A轉換后變為模擬信號,作為變頻器的輸入。模擬系統的動態模型結構如圖2所示,其中:Gn(s)為速度調節器傳函;KDA為DA轉換的比例系數;Kh為變頻器中模擬信號輸入對應頻率給定的比例系數;τh為變頻器近似一階慣性環節的時間常數;Te為電機電磁轉矩;TL為負載轉矩;Jm為轉子轉動慣量;α為轉速反饋系數。
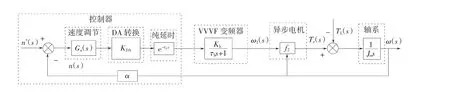
圖2 模擬系統動態結構Fig.2 Dynamic structure of the simulation system
異步電動機恒壓頻比正弦波供電時,當轉差很小時忽略電動機的電磁慣性,電動機的機械特性方程式為

式中:np為電機極對數;Us為電機定子相電壓有效值;ω1為電機同步角頻率;ω為電機轉子角頻率;R'r為折合到定子側的轉子每相電阻。由于采用VVVF變頻方式,所以設Ks=Us/ω1為常數。
令TL(s)=0,可求出 ω1(s)和 ω(s)的傳遞函數為

式中,τm=JmR'r/(3npKs2)。進而可求出模擬系統開環傳函為

對比式(2)和式(5)發現模擬系統模型比微燃機模型少了一個延時環節,為了讓模擬系統與微燃機模型具有相同的形式,在模擬系統中串入一個數字純延時環節來模擬燃燒室,τZ為純延時時間常數,修改后的模擬系統開環傳函為

這樣所建立的模擬系統模型與微燃機系統具有相同的開環傳遞函數結構。因此針對模擬系統模型進行控制器設計等效于對微燃機控制器規律的設計。
式(6)中具有指數函數 e-τZs,此系統為非最小相位系統,給控制器設計帶來了不便,由于 τZ為大約10 ms的常數,對于這樣小的純延時環節可以近似為一階慣性環節,則開環傳函變為

2.2 控制規律設計
所采用的微燃機模擬系統模型參數為DA轉換增益KDA=0.003 9,變頻器增益Kh=3.75,變頻器慣性時間常數τh=1 s,純延時時間常數 τZ=0.01 s軸系轉動慣量Jm=0.001 5 kg·m2,折合到定子側的轉子每相電阻 R'r=0.151 Ω,異步電機額定相電壓UsN=220 V,異步電機額定同步角頻率ω1N=314 rad/s,電機慣性時間常數τm=0.026 s,轉速反饋系數α=9.55,其中變頻器慣性時間常數最大,異步電機和純延時時間常數較小,系統的開環增益較小。
從被控對象的Bode圖(圖3)發現相角裕度和增益裕度都不滿足系統穩定條件,且動態快速性和穩態精度差。不能滿足微燃機系統穩態運行時具有良好平穩性、穩態精度、抗干擾能力以及不希望出現大轉速超調的要求。針對被控對象的特點和系統對控制器的要求模擬系統采用PI控制。基于模擬系統得到的校正流程和參數整定經驗可以應用于微燃機系統。

圖3 模擬系統Bode圖Fig.3 The Bode diagrams of the simulation system
PI控制的傳遞函數為

式中,Kpi為比例放大系數,τ1為微分項超前時間常數,τ1/Kpi為積分時間常數。從式(7)可知被控對象是由一個較大的慣性環節和兩個較小的慣性環節組成的三慣性系統。將兩個小慣性環節合并為一個,控制器微分項抵消大慣性環節,系統設計成典型Ⅰ型系統;或者將大慣性環節近似為積分環節,合并兩個小慣性環節,系統設計成典型Ⅱ型系統。每種系統選擇了兩組參數,具體數值見表1,Bode圖如圖3所示。
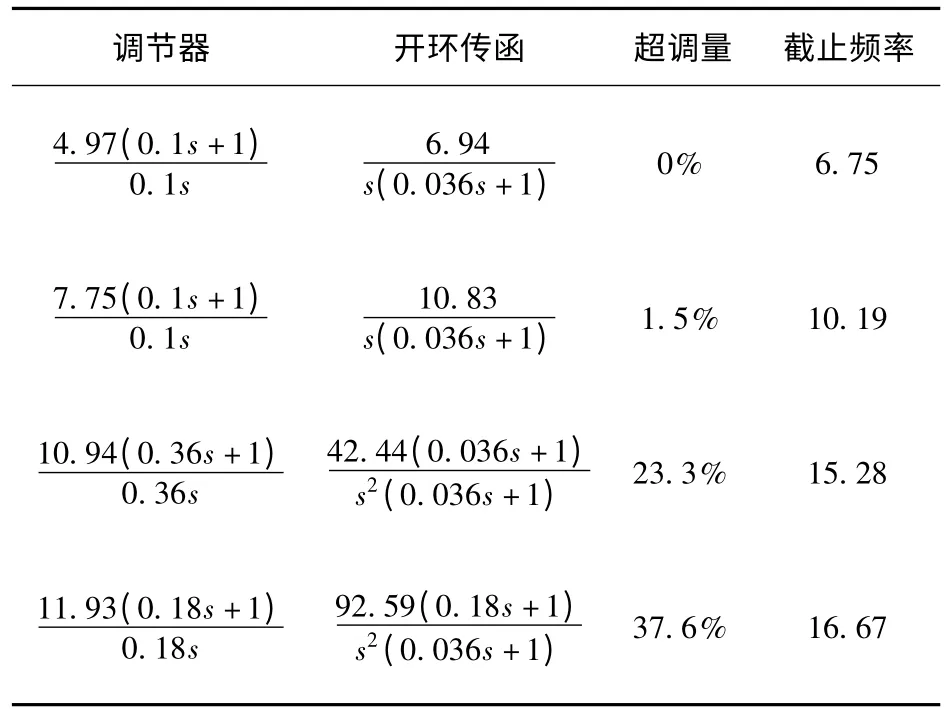
表1 控制參數設計Table 2 Designing control parameters
由表1和圖3可知,設計成典型Ⅰ型系統的特點是超調小、穩定裕度大和動態響應慢;設計成典型Ⅱ型系統的特點是超調較大、穩定裕度較小和動態響應快。
3 負載前饋控制
由于微燃機的轉動慣量較大,負載發生變化需要較長時間反應到轉速,并且PI調節器的輸出還要經過延時和慣性環節才能反應到透平轉矩,因此PI調節器不能很好的抑制負載擾動。轉速調節器為PI控制無負載前饋時負載與轉速的傳函為

式中,Kn=αKDAKhKω。
加入負載前饋后的系統控制框圖如圖4所示,GL(s)為負載前饋通道的傳函。有負載前饋的負載與轉速的傳函為
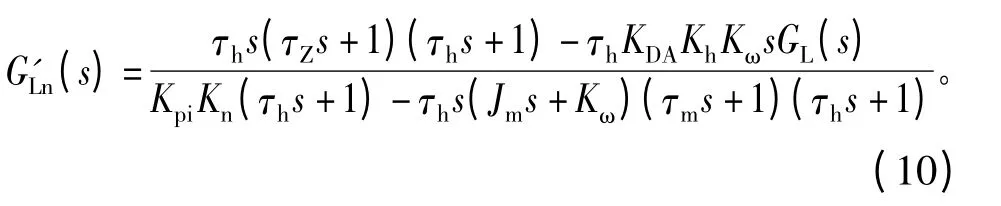
為了抵消大慣性的影響,令

式(10)變為

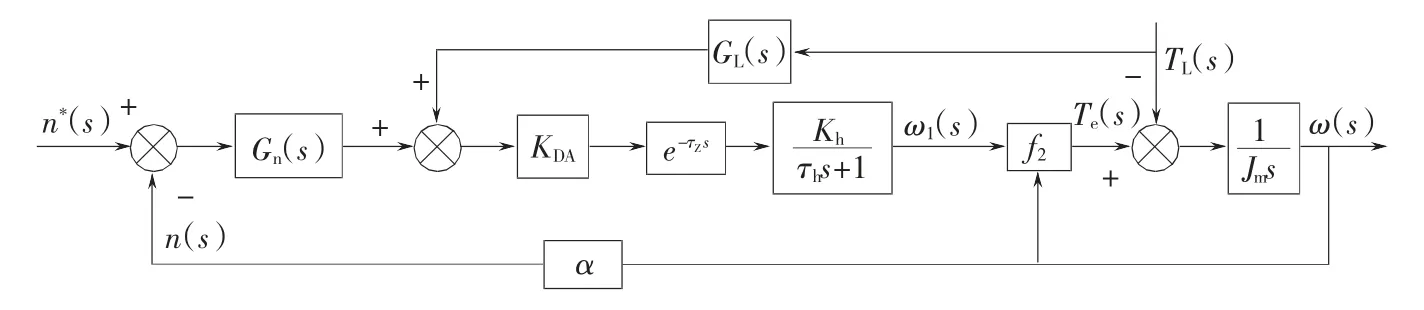
圖4 模擬系統負載前饋控制框圖Fig.4 Load feedforward control diagram of the simulation system
對比式(9)和式(12)可知加入負載前饋后傳函的分子由純微分和一階微分環節變為二階純微分環節,減小了負載對轉速動態影響而且可以抑制加速度輸入的負載對轉速的影響,增強了系統的抗負載擾動能力。
負載前饋控制的加入使燃油量不僅決定于調節器的輸出而且還受負載的控制,負載的變化直接影響了燃油量,提高了系統對負載的動態特性。在模擬系統中證明了負載前饋控制的有效性。
4 仿真分析及實驗驗證
根據前文建立的微燃機和模擬系統動態模型,利用所設計的轉速控制規律和負載前饋控制分析,在Matlab/SIMULINK中進行了仿真。圖5(a)是按照典型Ⅰ型系統設計的兩組調節器參數結果,隨著比例增益的增大超調增大、調節時間減小、震蕩次數增加。圖5(b)是按典型Ⅱ型系統設計的兩組調節器參數結果,比例增益對動態性能的影響與典型Ⅰ型系統相似。對比5(a)和圖5(b)可知按典型Ⅰ型系統設計比Ⅱ型系統的超調小甚至無超調、震蕩次數少、動態響應慢。仿真結果與前面的理論設計動態特性具有很好的一致性。圖5(c)和圖5(d)分別是Ⅰ型系統和Ⅱ型系統采用兩組控制規律時突加負載有無負載前饋的仿真結果。由于負載前饋的引入加快了負載擾動時的轉速恢復時間,減小了轉速降,提高了系統的抗負載擾動性能,與前面的理論分析結果是一致的。
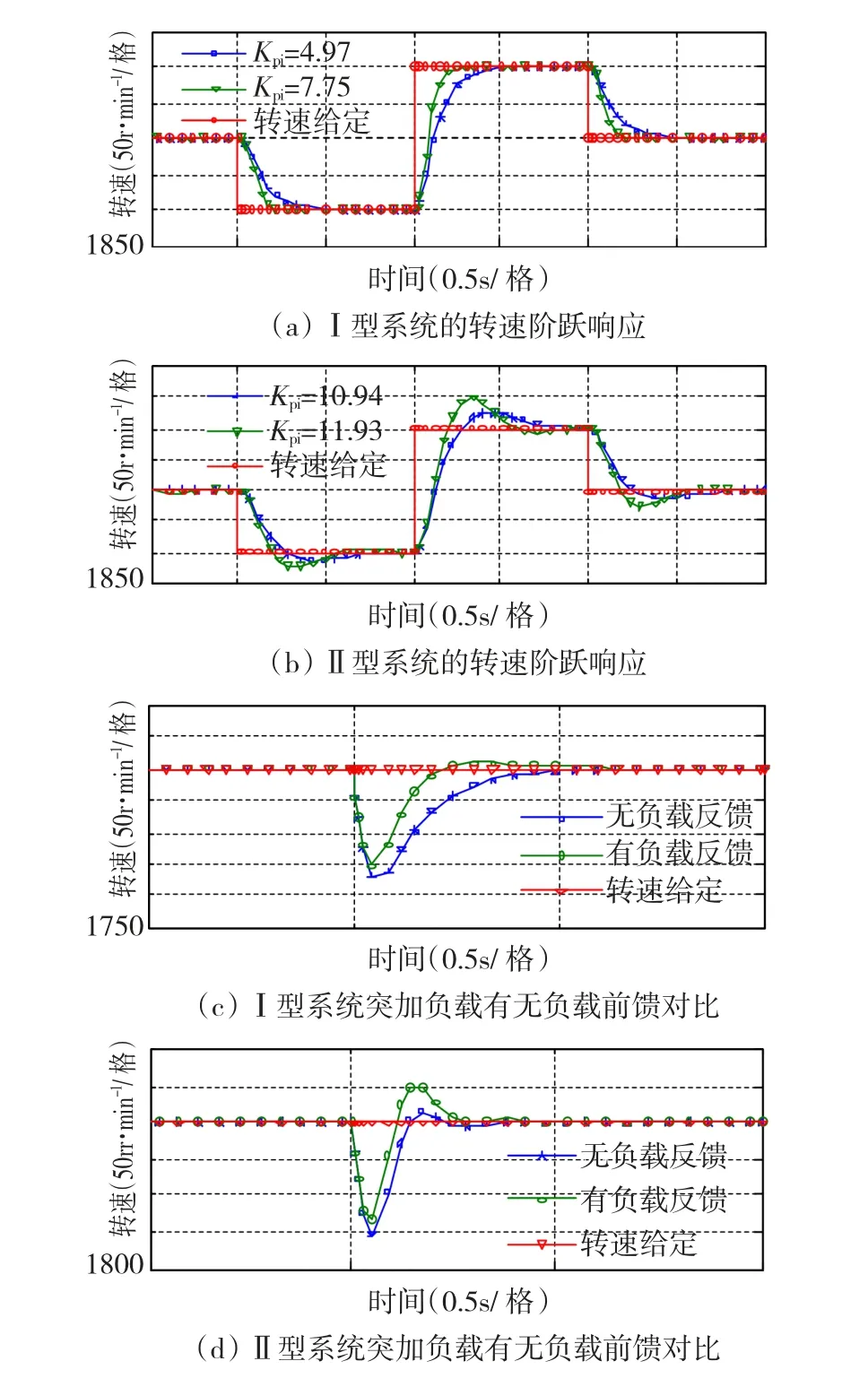
圖5 仿真波形Fig.5 Simulation waveforms
基于前述理論分析設計和仿真驗證構建了微燃機模擬系統實驗平臺,如圖6所示。異步電機、直流啟動發電機和步進電機同軸連接,直流啟動發電機在啟動過程用于拖動系統升速,利用步進電機端電壓的過零點測取轉速,同時步進電機作為負載元件。這樣構建的實驗平臺可以模擬微燃機冷運轉、啟動、空載運行、帶載運行、負載突變、故障模擬等工況。

圖6 模擬系統平臺示意圖Fig.6 The simulation system schematic diagram
控制器參數為Kpi=4.97、τ1=0.1,轉速參考值由2 100 r/min變為1 900 r/min和由1 900 r/min變為2 100 r/min的實驗結果如圖7(a)、(b)所示,穩態誤差為20 r/min,轉速變化與前面的仿真一致,驗證了理論分析設計的正確性。接入三相對稱電阻的步進電機繞組電流反映了切入負載的變化和大小,沒有負載前饋控制的實驗結果如圖7(c)所示,有負載前饋控制的實驗結果如圖7(d)所示。對比可知負載前饋控制的加入加快了轉速閉環的動態過程,增強了抗負載擾動的能力,與前面的理論分析吻合。

圖7 模擬系統實驗波形Fig.7 The simulation system experimental waveforms
5 結語
基于動態模型的相似性增加了數字純延時環節的變頻器驅動異步電機調速系統構成了微燃機模擬系統。按照典型Ⅰ型系統設計的控制規律很好的滿足了實際系統對平穩性、穩態精度及轉速超調的要求。進一步在理論上分析了轉速抗負載擾動動態性能差的原因,提出的負載前饋控制使負載與轉速傳函的分子由原來的純微分、一階微分環節變為二階純微分環節,加快了轉速控制器對負載擾動的動態響應。Matlab仿真和模擬系統平臺實驗結果證明利用模擬系統調試控制器是正確而有效的,所提負載前饋控制的確增強了控制器抗負載擾動性。本文所提方法對微燃機控制器的研制具有理論參考價值和應用價值。
[1]趙克,耿加民,孫力.微型燃氣輪機發電系統新型并網控制技術[J].電機與控制學報,2008,12(4):409 -414.ZHAO Ke,GENG Jiamin,SUN Li.Novel grid-connected control tecnniques for the microturbine generation system[J].Electric Machines and Control,2008,12(4):409 -414.
[2]耿加民,張化光,張宏杰.微型燃氣輪機雙向電力變換系統設計與研究[J].電機與控制學報,2007,11(5):551 -554.GENG Jiamin,ZHANG huaguang,ZHANG Hongjie.Design and research of bidirectional electric converter for micro - turbine[J].Electric Machines and Control,2007,11(5):551 -554.
[3]DAVIS M W,GIFFORD A H,KRUPA T J.Microturbines-an economic and reliability evaluation for commercial,residential,and remote load applications[J].IEEE Transactions on Power Systems,1999,14(4):1556 -1562.
[4]徐鋼,林汝謀,邵艷軍,等.燃氣輪機建模的通用性和精細性研究[J].中國電機工程學報,2005,25(21):106 -111.XU Gang,LIN Rumou,SHAO Yanjun,et al.Study on universality and precision of gas turbine modeling[J].Proceedings of the CSEE,2005,25(21):106 -111.
[5]張化光,鄧瑋,耿加民.發電用燃氣輪機的非線性數學建模及穩定性分析[J].中國電機工程學報,2007,27(26):108 -114.ZHANG Huaguang,DENG Wei,GENG Jiamin.Nonlinear modeling and stability analysis of gas turbine used for electricity generating[J].Proceedings of the CSEE,2007,27(26):108 -114.
[6]KUNITOMI K,KURITA A,OKAMOTO H.Modeling frequency dependency of gas turbine output[C]//IEEE Conference on Power Engineering,Columbus,2001.
[7]ROWEN W I.Simplified mathematical representations of heavy-duty gas turbines[J].American Society of Mechanical Engineers Journal of Engineering for Power,1983,105:865 -869.
[8]Working Group on Prime Mover and Energy Supply Models.Dynamic models for combined cycle plants in power system studies[J].IEEE Transactions on Power Systems,1994,9(3):1698-1708.
[9]Working Group on Prime Mover and Energy Supply Models.Hydraulic turbine and turbine control models for system dynamic studies[J].IEEE Transactions on Power Systems,1992,7(1):167-179.
[10]GUDA S R,WANG C,NEHRIR M H.A simulink-based microturbine model for distributed generation studies[C]//IEEE Proceedings of the Thirty-Seventh Annual North American Power Symposium,Ames,2005.
[11]張會生,劉永文,蘇明,等.燃氣輪機調速系統半物理仿真研究[J].系統仿真學報,2002,14(3):400 -402.ZHANG Huisheng,LIU Yongwen,SU Ming,et al.Hardware-inthe-loop simulation of the speed regulator of gas turbine[J].Journal of System Simulation,2002,14(3):400 - 402.
[12]程濤.小型渦噴發動機數控調節器的半實物仿真[J].航空動力學報,2004,19(3):383 -386.CHENG Tao.Hardware in the loop simulation of minitype turbojet engine digital control regulator[J].Journal of Aerospace Power,2004,19(3):383 -386.
[13]NITAIGOUR P M,KISEON K.A prototype for hardware-in-theloop simulationof a distributed control architecture[J].IEEE Transactions on Systems,Man,and Cybernetics:Part C:Applications and Reviews,2008,38(2):189 -200.
[14]GUILLAUD X,DEGOBERT Ph,LORIOL D.Real-time simulation of a micro-turbine integrated in a distribution network[C]//IEEE International Symposium on Power Electronics,Electrical Drives,Automation and Motion,Taormina,2006.
[15]SOON K Y,HUGHES F M,MILANOVIC J V.Comparative analysis and reconciliation of gas turbine models for stability studies[J].IEEE Power Engineering Society General Meeting,Tampa,2007.
[16]SAHA A K,CHOWDHURY S,CHOWDHURY S P,et al.Modeling and performance analysis of a microturbine as a distributed energy resource[J].IEEE Transactions on Energy Conversion,2009,24(2):529 -538.
[17]ROWEN W I.Simplified mathematical representations of single shaft gas turbines in mechanical drive service[C]//International Gas Turbine and Aeroengine Congress and Exposition,Cologne,1992.
[18]CENTENO P,EGIDO I,DOMINGO C,et al.Review of gas turbine models for power system stability studies[C]//9th Spanish Portuguese Congress on Electrical Engineering,Marbella,2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16