基于小波分解的彎道識別技術
2012-01-19 12:15:26杜毓皓張亞岐
電子科技 2012年8期
關鍵詞:單片機
杜毓皓,張亞岐,李 健
(長安大學汽車學院,陜西西安 710064)
基于小波分解的彎道識別技術
杜毓皓,張亞岐,李 健
(長安大學汽車學院,陜西西安 710064)
為了保障車輛安全有效的通過彎道,準確識別彎道曲率尤為重要。因此,文中提出一種基于小波分解的彎道識別技術,該算法通過車載CCD實時采集自車前方的車道線的圖像信息,對采集的圖像進行小波去噪以及小波邊緣檢測,最終準確辨識車道線,通過曲線擬合確定道路的曲率半徑。經試驗驗證,該算法能準確辨識出彎道的曲率半徑。
彎道識別;小波分解;曲線擬合
車輛在彎道行駛時少有產生變道行為,因此在彎道上行駛時,近似認為車輛始終處于車道保持狀態。且新手駕駛員路感差,通過彎道時不能準確控制車速,易造成交通事故,且在交通流量較大的路段,快速高效地通過彎道路段對改善交通流量有幫助。因此,尋求簡單易行的彎道超速預警算法成為研究人員關注的焦點。文中在此基礎上提出了基于小波分析的彎道識別技術,一方面,通過車載CCD實時采集車輛前方道路信息,利用小波分解對采集回來的圖像進行去噪、邊緣檢測處理,經過坐標變換轉換成實際道路曲線弧長,確定道路的曲率半徑;另一方面,通過車載加速度傳感器實時采集車輛橫向和縱向加速度,經過推導得到車輛超速比,單片機通過超速比的大小來提醒駕駛員當前車速是否超速,若超速,則單片機控制蜂鳴器會提醒駕駛員當前車速過高,以當前車速通過該路段有危險,因此,該算法結合車載傳感器采集回來數據對車輛超速進行預警。目前,圖像去噪方法甚多,較為成熟的有:均值濾波、中值濾波、高斯濾波[1]以及雙向濾波等。這些方法簡單,對去除與信號不相關的噪聲效果也較為理想,但是,這些方法易造成邊緣和紋理的模糊。文中利用小波分析去噪,再進行邊緣提取,最終準確確定道路曲率半徑。該方法精度高、穩定性好,對改善交通堵塞具有一定的輔助作用,且檢測結果與實際結果吻合度高。
1 小波分析
1.1 小波分析
小波被譽為“數學顯微鏡”,在時頻兩域具有較好的局部特性。將信號f(t)進行小波級數分解

式中,Ψj,k(t)為小波函數;dj,k為小波系數,且為小波函數的共軛函數,小波是級數的兩重求和,同時兼有頻率指標j和時間指標 k,小波函數
式中,j為伸縮參數;k為平移參數。小波變換的窗口是可調的時頻窗,尺度因子j不僅改變小波的頻譜結構,而且改變時頻窗口的大小。若j大,此時對應低頻端,頻率分辨率高,時間分辨率低;若j小,對應高頻端,頻率分辨率低,時間分辨率高。
1.2 像素距離向實際距離的轉化
圖1是攝像機傾角成像原理圖。

圖1 攝像機傾角成像原理圖
圖1中,F為鏡頭的光心位置;虛線為主光軸;M,N分別為鏡頭視角的上下端點;A,B為成像物體的上下端點;C,D分別為A,B兩點在圖像中的成像位置;L為焦點到垂直平面距離。當A點在鏡頭主光軸的上部,B點在下部,則
式中,2n為視角內總的像素;PA,PB分別為 A,B兩點像素值。AB就為物體的實際長度。其他兩種情況跟上述情況相似,只是A,B點在主光軸的位置不同。
2 試驗驗證
2.1 彎道識別
試驗采用攝像頭拍攝的照片,并利用Matlab語言[2]對其進行圖片處理。小波函數選用的是dB2,進行2層分解。為最大限度的保障安全,選用圖2(a)中右邊線作為彎道弧線,試驗中對各個車道線曲率半徑均進行擬合,挑選曲率半徑最小的彎道作為當前彎道曲率半徑。

由圖3可以看出,小波去噪后能夠較好地保持圖像的邊緣特征,小波多尺度分解能夠細化圖像邊緣,為精確提取圖像邊緣特征提供有效的數據支撐。進行3次曲線擬合如圖4所示。
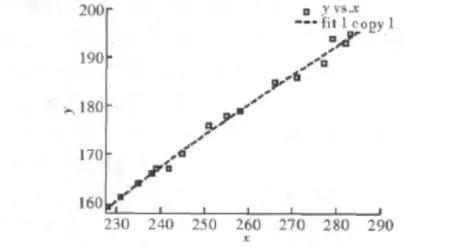
圖4 曲線擬合
擬合關系式f(x)=p1*x3+p2*x2+p3*x+p4;p1=1.594e-005;p2=-0.013 6;p3=4.46;p4=-340.4;將該段曲線近似看作一段弧長,經過坐標變換得出彎道的曲率半徑為725.33 m。實際彎道的曲率半徑為719.9 m,誤差為1%。
2.2 預警方案
彎道超報警輔助裝置包括車輛橫向加速度傳感器,縱向加速度傳感器,速度傳感器,8051單片機以及報警裝置。當自車行駛到彎道時,車速傳感器、車輛橫向加速度傳感器以及縱向加速度傳感器采集車輛的運動參數,將車輛的運行參數經過A/D轉換器輸入單片機,在單片機內進行簡單運算后,根據判定條件,單片機直接控制蜂鳴器是否作用。在單片機內需要計算車輛通過彎道的最大速度vmax,由于車輛在轉彎時很少變道,因此,忽略彎道處車輛的變道情況。且不考慮車輛質心側偏角的影響,計算車輛通過彎道的最大速度vmax公式如下
其中,R為轉彎的曲率半徑;v為車輛的速度,ax通過傳感器采集;為車輛的縱向加速度,通過加速度傳感器采集;aymax為最大橫向加速度,通過加速度傳感器采集;vmax為車輛通過彎道的最高車速;v為車輛當前的速度,通過速度傳感器采集。u為路面的附著系數,一般取0.7。也可通過儀器采集獲得。
聯立以上3式可以求得超速比λ
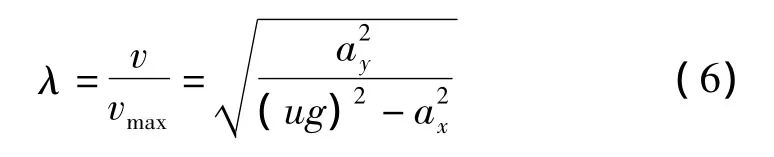
在單片機內判斷超速比是否>1,如果超速比λ>1時,表明此時車輛的速度過高,此時單片機控制報警裝置發出警報,提醒駕駛員以當前的速度v通過該彎道時會有危險。如果當前超速比λ>1時,報警裝置不起作用,說明此刻的車速低,以當前的速度v直接通過該彎道不會有危險。因此,這種彎道超速報警裝置可以有效地提高彎道處車輛的通行能力,降低彎道處由于車速高而引起的交通事故。且在夜間行駛時,這種彎道超速報警裝置可以明顯改善事故多發路段的交通狀況。
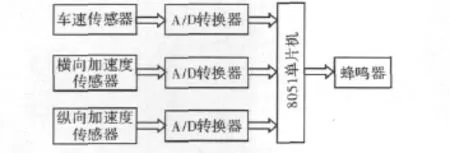
圖5 預警方案圖
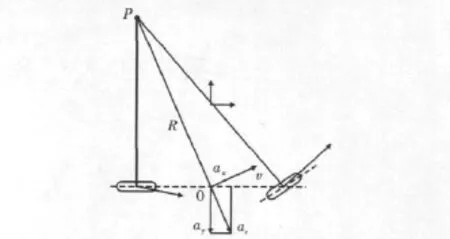
圖6 汽車穩態轉向運動簡圖
其中,忽略車輛的質心側偏角,即認為圖中的ax與v在同一方向上。v為車輛的質心速度;ax,ay分別為車輛橫向加速度和縱向加速度;w為車輛的橫擺角速度;P為彎道的曲率中心;R為彎道的曲率半徑。
3 結束語
通過對采集的車道線圖像信息進行小波去噪,充分保留圖像邊緣特征,為后續彎道識別提供了可靠數據支撐,而后進行小波邊緣檢測[3-5],提取圖像輪廓,通過圖像灰度值梯度變化率確定各個車道線,運用3次曲線擬合,確定車道線的弧長,經坐標變換最終確定彎道的曲率半徑。該方法充分利用小波良好的局部性質,且通過車載傳感器實時采集車輛運動參數,根據判定條件決定報警單元是否報警,這樣可以有效提高車輛通過彎道的速度,為保障行車安全提供技術支持。
[1]呂玉琴,曾光宇.基于圖像邊緣檢測算法的研究[J].太原科技,2009(2):31-33.
[2]張善文,雷英杰,馮有前.Matlab在時間序列分析中應用[M].西安:西安電子科技大學出版社,2007.
[3]甘亞輝,戴先中,李新德,等.小波邊緣檢測在焊縫圖像處理中的應用[J].華中科技大學學報:自然科學版,2008,36(增刊 I):65 -67,86.
[4]賈超,王耀坤,邢晶晶.利用小波多尺度積實現裂紋缺陷的邊緣檢測[J].計算機工程與應用,2011(15):219-221.
[5]姜涌,曹杰,杜亞玲,等.基于形態學梯度矢量的圖像邊緣提取算法[J].南京航空航天大學學報,2005,37(6):771-775.
Technology of Winding Roads Based on Wavelet Decomposition
DU Yuhao,ZHANG Yaqi,LI Jian
(School of Automobile,Chang'an University,Xi'an 710064,China)
In order to ensure that vehicles go through winding roads safely and effectively,accurate identification of the bend curvature is particularly important.Therefore,this article proposes a technology of identifying winding roads based on wavelet decomposition.This algorithm collects the real-time road images with vehicle-mounted CCD.The wavelet of the collected images is then de-noised and its edge detected.Finally the lane's line is accurately identified.The curvature radius is determined through curve fitting.Experiments show that this algorithm can accurately identify the curvature radius of the winding roads.
corners to identify;wavelet decomposition;curve fitting
TP206
A
1007-7820(2012)08-093-03
2012-01-03
國家道路交通安全科技行動計劃基金資助項目(2009BAG13A05)
張亞岐(1986—),男,碩士研究生。研究方向:車輛主動安全及ACC自動巡航控制。杜毓皓(1987—),男,碩士研究生。研究方向:車輛主動安全及ACC自動巡航控制。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
