智能小車尋線控制與跡線分支識別方案設計
2012-01-12 14:44:34吳天強李浩琦黃曉陽林文龍
臺州學院學報 2012年3期
吳天強,李浩琦,吳 洲,黃曉陽,林文龍
(臺州科技職業學院,浙江 臺州 318020)
智能小車尋線控制與跡線分支識別方案設計
吳天強,李浩琦,吳 洲,黃曉陽,林文龍
(臺州科技職業學院,浙江 臺州 318020)
介紹了一種機器人智能尋跡與跡線分支識別方法,給出了小車尋線過程中錯誤干擾信息的處理方法。利用小車頭部4個紅外反射式傳感器,讀取的導航路徑信息經識別后,能夠區分十字路口、丁字路口、左直角轉彎、右直角轉彎、死路以及起始、終點等基本路徑信息,實現小車在平面線軌跡地圖中的自主導航運動。
尋跡小車;紅外傳感器;尋線控制;抗干擾
1 引言
隨著機器人技術的不斷發展,人們希望機器人能更加靈活地適應各種工作環境,完成更為復雜的任務,研制能夠代替人類在危險,惡劣環境下工作的具有一定自主能力的輪式機器人是當前國內外研究的熱點[1]。
智能尋跡電動小車是一個運用傳感器、單片機、信號處理、電機驅動及自動控制等技術來實現環境感知和自動行駛為一體的高新技術綜合體,它在軍事、民用和科學研究等方面已獲得了應用[2]。
光電傳感器具有結構簡單、檢測精度高、反應快、非接觸等優點,在智能尋跡小車等應用領域獲得快速發展,本文以紅外反射式光電傳感器在智能尋跡小車中的應用為例,通過實例設計,說明一種尋線控制與跡線分支識別的方法。
2 尋線控制
尋線控制是尋跡小車的基本功能,能使小車按照固定引導線前進,當小車與引導線發生偏移時,小車能夠自動調整以消除偏差,使小車前進方向與引導線方向保持一致[3]。尋線控制效果好壞與傳感器的數量多少、布置方式密切相關。傳感器數目越多,尋線控制效果越好,但是,大量的傳感器會帶來布局安裝困難和復雜的尋跡算法。為提高尋線識別能力,引導線與背景之間色差區別越大越好,如白色與黑色,對光線反射與吸收差別明顯,有利于傳感器區分引導線所在位置。

圖1 紅外反射式傳感器布局示意圖
圖1給出本文設計的4個紅外反射式光電傳感器的“一”字型布局位置示意圖,其中,引導線黑色、背景白色,②③號傳感器均需壓在引導線正上方,①與②、③與④傳感器間距略大于引導線寬度。
為方便說明,設傳感器檢測到引導線輸出為“1”,檢測到背景輸出為“0”,并假定用小方框表示傳感器,方框內的顏色表示傳感器的取值,規定用“□”符號表示該傳感器取值為“1”狀態,“■”符號表示該傳感器取值為“0”狀態,則圖1的取值是:②③傳感器檢測到引導線,取值為1,用“□”表示;①④傳感器未檢測到引導線,取值為0,用“■”表示。圖1的①②③④四個傳感器取值表示為“■□□■”,對應編碼為“0110”。
在上述的規定下,表1與表2給出傳感器與引導線之間相對位置變化時對應的尋線控制關系。表1是小車右轉尋線控制,表1編號1的數據與圖1的表述相一致,故小車運動控制為直行;表1編號2的數據表示引導線位置介于②④傳感器之間且③傳感器輸出為1,對應輸出編碼為0010,因為傳感器處于小車正前方,所以此時車身略偏于引導線左方,故以右轉速度1運動使車身緩慢回調到引導線正上方。表1編號4的數據表示只有④傳感器在引導線上方,車身相對于引導線的位置左偏較多,需要以右轉速度2快速回調來進行車身位置修正。
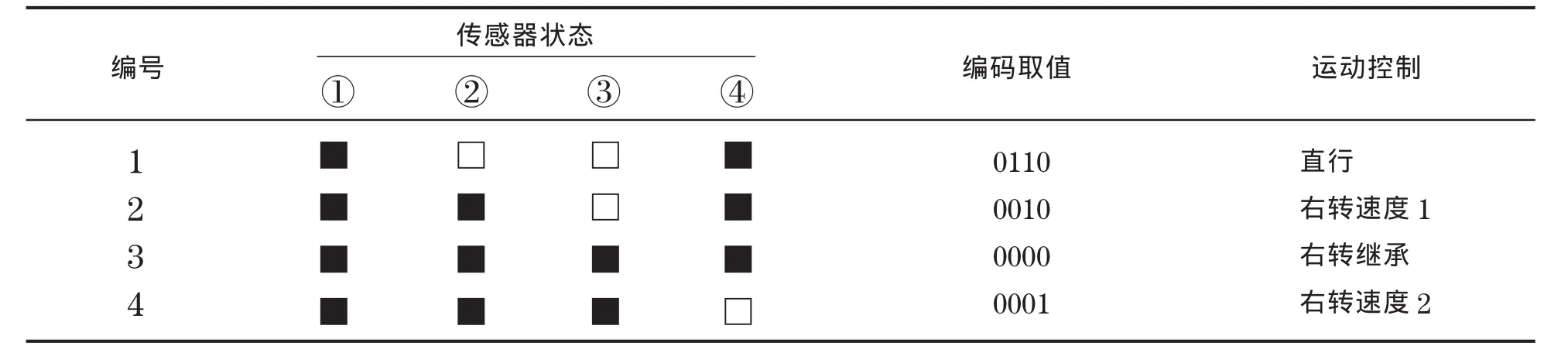
表1 右轉尋線控制
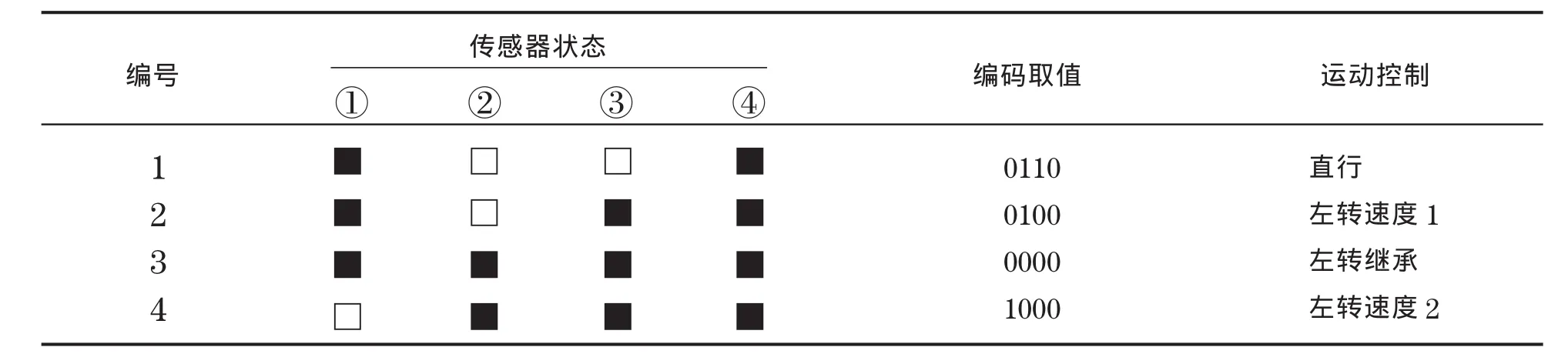
表2 左轉尋線控制
表1編號3的數據編碼為0000,需要調用上一次檢測的數據來判別當前小車運動狀態,由于小車運動的連續性,對應的數據只有兩種情形:一是表1編號2,二是表1編號4,這兩種情形都表示引導線落在③④傳感器之間,即確定小車處于左偏運動狀態。此時車身回調也分兩種情形:若調用數據為表1編號2,表示小車運動略有左偏,以右轉度1緩慢回正;若調用數據為表1編號4,小車運動左偏較多,需以右轉速度2快速回正。表2與表1的控制情況類似,不同之處是表2的控制方向為左側。
表1與表2中編號2的數據用于車身略有偏離時的回調修正控制,編號3的數據可抑制快速回調時由于慣性引起的振蕩,編號4的數據則實現較小角度急轉彎時的連續尋線轉彎控制功能。
3 跡線分支控制設計方案
尋線控制只能實現小車依照單一引導線運動,無法識別復雜的路徑信息,如引導線交叉的十字路口、丁字路口等路況識別,顯然,若要實現跡線地圖導航,則需增加跡線分支識別功能。簡單的導航地圖可由十字路口、丁字路口、左直角轉彎、右直角轉彎、死路、起始點、終點以及直或彎曲的引導線等8種基本要素組成,跡線分支設計即是給出上述前7種地圖要素的識別方案。
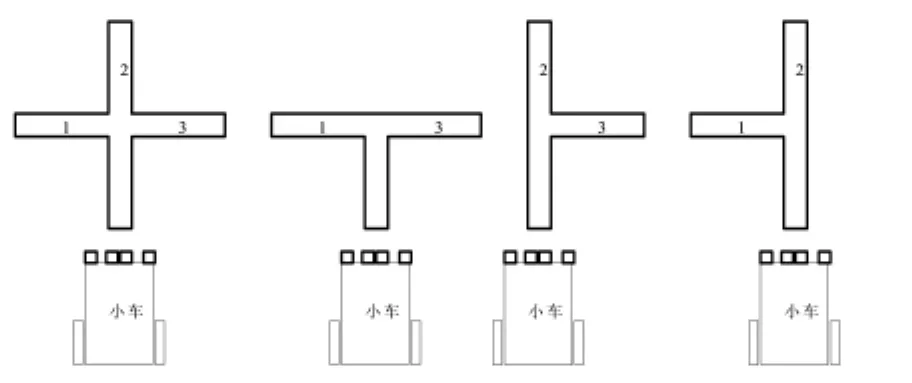
圖2 小車進入十字路、丁字路口示意圖
十字路口具有對稱性,小車進入十字路口只有一種情形,而丁字路口可分為三種情況,如圖2小車準備進入十字路、丁字路口示意圖所示。以小車進入十字路口為例說明傳感器取值變化過程如下:小車進入十字路口時,傳感器壓在橫向引導線上必定會出現全“1”,小車繼續前進后傳感器離開橫向引導線,中間的②③傳感器壓在豎向引導線上輸出為“1”,兩邊①④傳感器輸出為“0”,由此判定當前為十字路口。盡管小車運動過程可能會偏離引導線,但是正常情況下,②③傳感器至少有一個壓在豎向引導線上。綜上所述,識別十字路的編碼特征是傳感器先出現全“1”后變成②③中至少有一個為“1”且①④為“0”。
其他路口編碼特征見表3跡線分支識別設計方案,共有8種路況信息分別說明如下:丁字路口1的編碼特征是出現全“1”后為全“0”,丁字路口2的編碼特征是先出現①②必為“1”且④必為“0”,然后取值變為②③中至少有一個為“1”且①④為“0”,丁字路口3的編碼特征是先出現③④必為“1”且①必為“0”,然后變成②③中至少有一個為“1”且①④為“0”;左直角轉彎與丁字路口2的區別是后出現的編碼必定是全“0”,右直角轉彎與丁字路口3的區別在于后出現的編碼也是全“0”;死路的編碼特征是始終為全“1”,其終止線條寬度至少是線導線寬度的3倍;起點、終點使用相同的編碼,其特征編碼是“1001”。
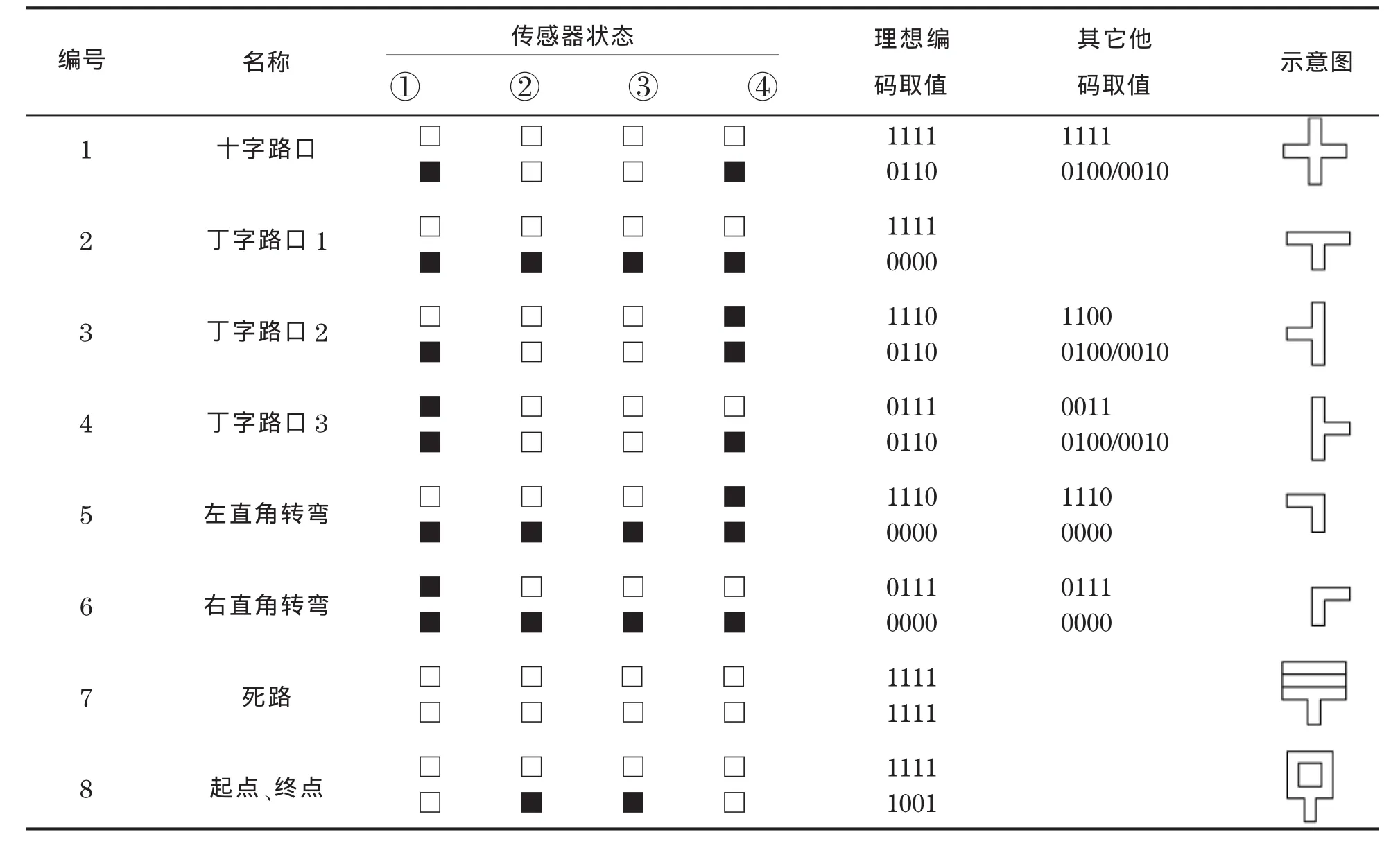
表3 跡線分支設計方案
4 抗干擾處理
表3給出的是小車車身與引導線保持平行一致時的編碼取值,實際小車在尋線控制調整前進過程中,車身不可能完全與引導線保持平行,這會造成傳感器編碼識別錯誤。圖3給出一種可能的錯誤跡線分支識別過程,其中,虛線串起的方框表示四個傳感器所在直線位置。圖3(a)表示由于尋線車身控制調整,小車處于傾斜進入死路標記識別區前的豎向引導線上,傳感器輸出編劇碼為:0110;圖3(b)是車身傾斜導致四個傳感器不能同時壓在橫向引導線上,傳感器輸出編碼為:1100;圖3(c)表示傳感器部分離開死路標記識別區,輸出編碼為:0011;所以上述的輸出編碼屬于表3編號3的情況,即將死路標記識別成丁字路口2。
圖4給出一種正確的死路標記識別過程。分析圖3(b)狀態到圖3(c)狀態,必定會出現圖4(b)和圖4(c)的狀態,因此,在小車前進運動過程中必須快速連續讀取傳感器輸出的編碼信息,以捕捉圖4(b)(c)狀態,只要捕捉到這種狀態即可判定為死路標記。
采用表3的跡線分支識別方案,在尋線控制程序中提高編碼“1111”處理優先級,這樣可以把表3中的8種狀態分成兩大類,即一類是出現“1111”的跡線分支標記信息,另一類則不會出現全“1111”的編碼,即是表 3編號 3、4、5、6的四種情況。
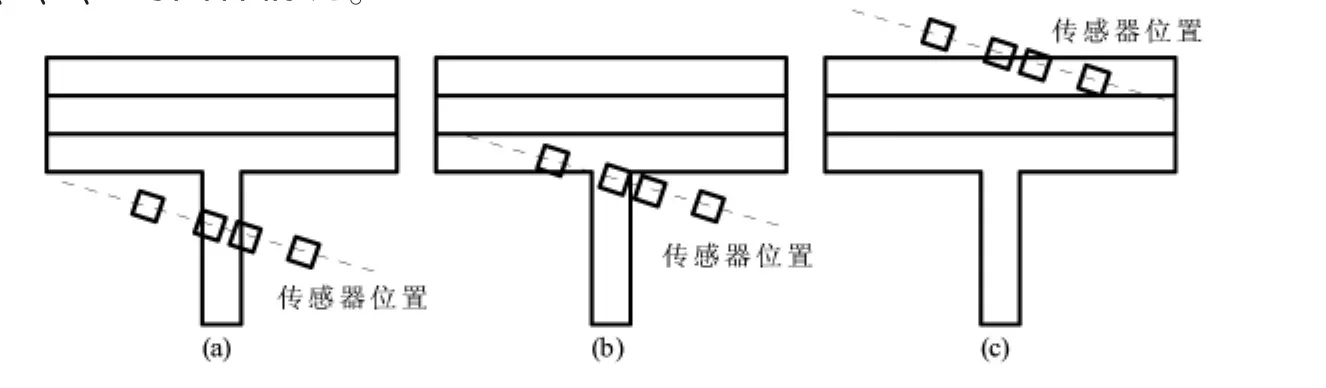
圖3 錯誤的死路標記識別過程
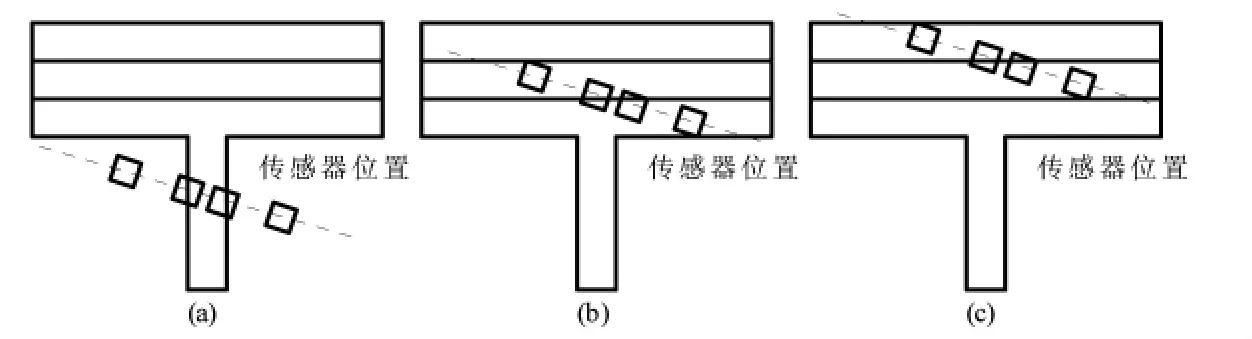
圖4 正確的死路標記識別過程
出現編碼“1111”的十字路口、起點或終點、丁字路口1及死路等4種狀態的第二個特征編碼分別是0110、1001、0000與1111,這4個第二特征編碼的差異大,抗干擾能力強;表3編號3、4與編號5、6狀態的第二特征編碼分別是0110與0000,即是有1與無1的區別,亦容易區分。
綜上所述,本文的跡線分支設計方案,宜采用快速、連續采集傳感器數據,并提高編碼“1111”的處理優先級,可增加跡線分支識別的可靠性。
5 結束語
以使用紅外反射式傳感器的智能尋跡機器人小車為例,利用4個排列在小車頭部的“一”字型紅外反射式傳感器,在小車運動過程讀取黑色引導線構成的路徑信息,給出一種導航尋線控制與跡線分支識別的設計方案;詳細介紹了因車身與導航跡線不平行而產生的錯誤信息抗干擾處理方法;該方案能夠區分十字路口、丁字路口、左直角轉彎、右直角轉彎、死路以及起始、終點等基本路徑信息,可以實現小車在平面線軌跡迷宮地圖中自主導航運動。
[1]李閱薄,羊彥等.雙電機獨立驅動底盤控制算法設計[J].計算機測量與控制,2009,17(3):481-483.
[2]劉燕,劉志.基于單片機控制的自主尋跡電動小車的設計[J].自動化與儀器儀表,2007,(3):9-11.
[3]寧慧慧,余紅英.基于紅外光電傳感器的智能車兩輪差速轉向模糊控制[J].工業控制計算機,2010,23(2):94-95.
Design of Tracing and Branch Identification for Intelligent Automobiles
WU Tian-qiang,LI Hao-qi,WU Zhou,HUANG Xiao-yang,LIN Wen-long
(Taizhou Vocational College of Science&Technology,Taizhou 318020,China)
A new method of tracing and trace branch identification about robots is introduced in this paper,and how to deal with interference in the process of tracing is also discussed.After the navigation information from the four infrared reflective sensors equipped in the forepart of intelligent automobiles is identified, automobiles will be able to identify the path such as crossing,T-shaped crossing,right turn,left turn,dead ends,starting point and terminals,and then autonomous navigation movement in the planimetric map can be realized.
intelligent automobiles’tracing;infrared reflective sensors;tracing control;anti-interference
周小莉)
TG146.4
A
1672-3708(2012)03-0025-05
2011-07-16;
2011-09-21
浙江省大學生科技創新項目資助(2010R461003)
吳天強(1977- ),男,浙江天臺人,工程碩士,講師,主要從事機電工程教學研究工作。
book=29,ebook=469
