六自由度機械手靜力學分析
2021-10-11 01:48:56畢方淇王文麗張立凱陳金利張榮彬
裝備機械 2021年3期
□ 畢方淇 □ 王文麗 □ 張立凱 □ 陳金利 □ 蔣 鑫 □ 張榮彬 □ 李 志
淄博市農業機械研究所 山東淄博 255000
1 分析背景
近年來,工業機器人在各行各業應用和普及,極大促進了我國邁入工業4.0的智能化進程。在這一過程中,機器人的研究應用占據重要位置。機器人是我國智能裝備、智能農業的重要基礎和組成部分,但我國機器人研究起步較晚,技術相比國外還有一定差距,我國對機器人的研究依然任重而道遠[1-4]。
六自由度機械手是一種較為常見的工業機器人,有較為嚴格的工作精度和結構剛度要求。對六自由度機械手各零部件進行研究,獲得相應零部件的剛度、應力、應變情況與變化規律,對確保六自由度機械手穩定運行有重要作用。
在文獻[5-6]所進行的機械手分析中,采用的分析模型過于簡化,模型中未提供機械手內部結構,較難反映機械手受力后的真實情況。樊炳輝等[7]分析的機械手自由度較少,與六自由度機械手結構有較大差異。文獻[8-9]所做研究與筆者所分析的六自由度機械手結構差別較大,且針對六自由度機械手框架式零部件的結構驗證與分析較少。
筆者以典型六自由度機械手為研究對象,應用SolidWorks軟件建立幾何模型,應用Workbench軟件進行靜力學分析,獲得六自由度機械手大臂和小臂剛度、應力、應變云圖,驗證六自由度機械手零部件的合理性,為后續設計和改進提供數據參考。
2 力學理論
根據六自由度機械手受力情況,其零部件受力后變形為彈性變形,不應出現塑性變形。由此,仿真分析中涉及彈性力學平衡微分方程、幾何方程和物理方程[10]。
2.1 平衡微分方程
平衡微分方程為:
(1)
式中:σx、σy、σz為主應力;τxz、τyz、τyx、τzx、τxy、τzy為切應力;x、y、z為單位體積上作用的體積力F在三個坐標軸上的分量。
2.2 幾何方程
幾何方程為:
(2)
(3)
式中:u、v、w為表征質點相對于三個坐標軸方向的位移量;εx、εy、εz為主應變;γxy、γyz、γzx、γyx、γzy、γxz為切應變。
2.3 物理方程
物理方程為:
(4)
式中:D為彈性矩陣;E為彈性模量;μ為泊松比。
3 幾何模型結構
六自由度機械手的結構較為復雜,需要考慮完整支撐、旋轉、連接、固定等功能。雖然有限元仿真時需要對六自由度機械手的結構進行簡化,但是設計過程中應對六自由度機械手的結構進行完整、詳盡設計。六自由度機械手幾何模型如圖1所示。
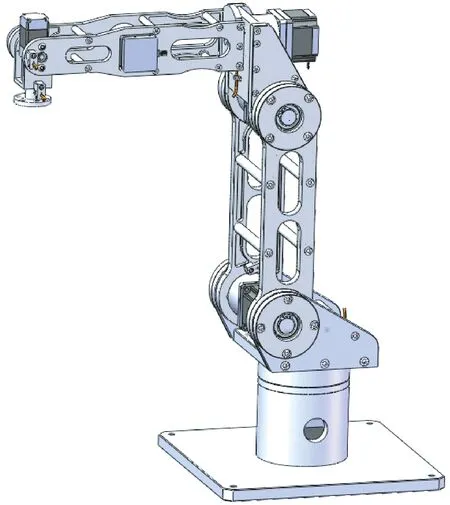
圖1 六自由度機械手幾何模型
4 網格劃分
根據六自由度機械手幾何模型,對六自由度機械手的大臂和小臂單獨建模,如圖2所示。
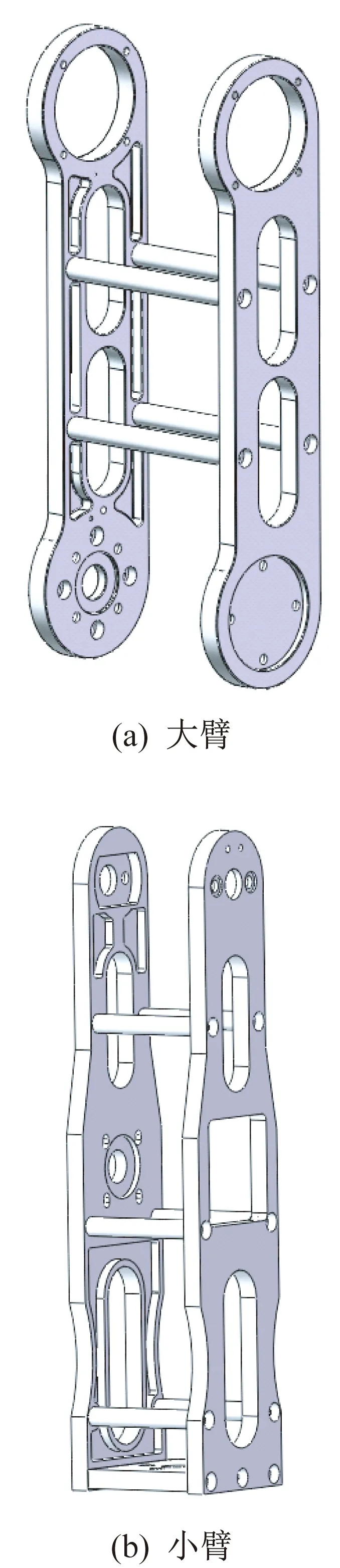
圖2 結構單獨建模
為保證有限元網格劃分的精度和經濟性,對大臂、小臂模型進行如下簡化:
(1) 將倒角和倒圓角簡化為直角;
(2) 將孔底118°錐角簡化為平面;
(3) 大臂、小臂左右側板與直桿之間無間隙;
(4) 對某些不影響結構強度的較薄位置適當加厚,以減少網格數量。
網格劃分時,網格大小為5 mm,劃分方式為自由劃分。網格劃分參數見表1。
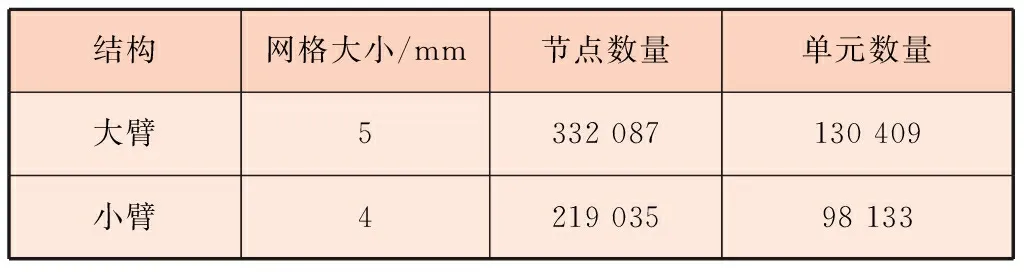
表1 網格劃分參數
大臂、小臂模型網格劃分后的局部情況如圖3所示。
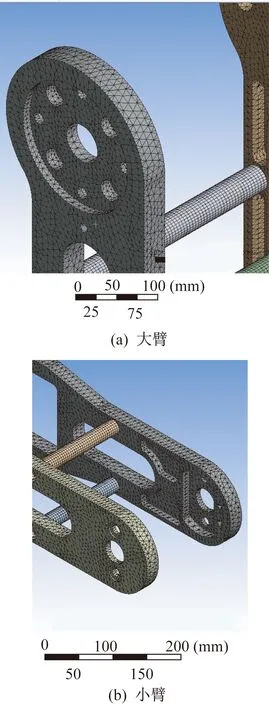
圖3 模型網格劃分
5 靜力學分析
大臂、小臂的材料為鋁合金,力學參數見表2。

表2 鋁合金力學參數
分別按照大臂和小臂在水平、豎直兩個方向極限位置施加靜力載荷[5],載荷大小為后續結構質量。根據重力方向,將不同方向的載荷乘以負載因數2.4,分別施加給大臂和小臂。經計算,大臂的質量為46 kg,則其受力為1 081.92 N;小臂的質量為11 kg,則其受力為258.72 N。
固定大臂和小臂與上一級結構活動關節部位,在大臂和小臂關節端分別施加載荷。
水平放置的大臂剛度、應力、應變云圖如圖4所示,豎直放置的大臂剛度、應力、應變云圖如圖5所示。
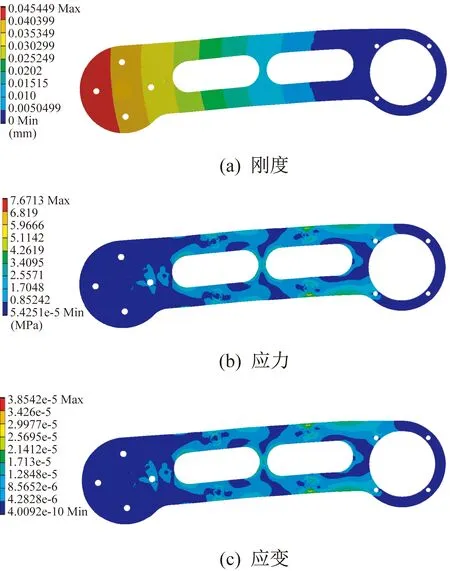
圖4 大臂水平放置分析云圖
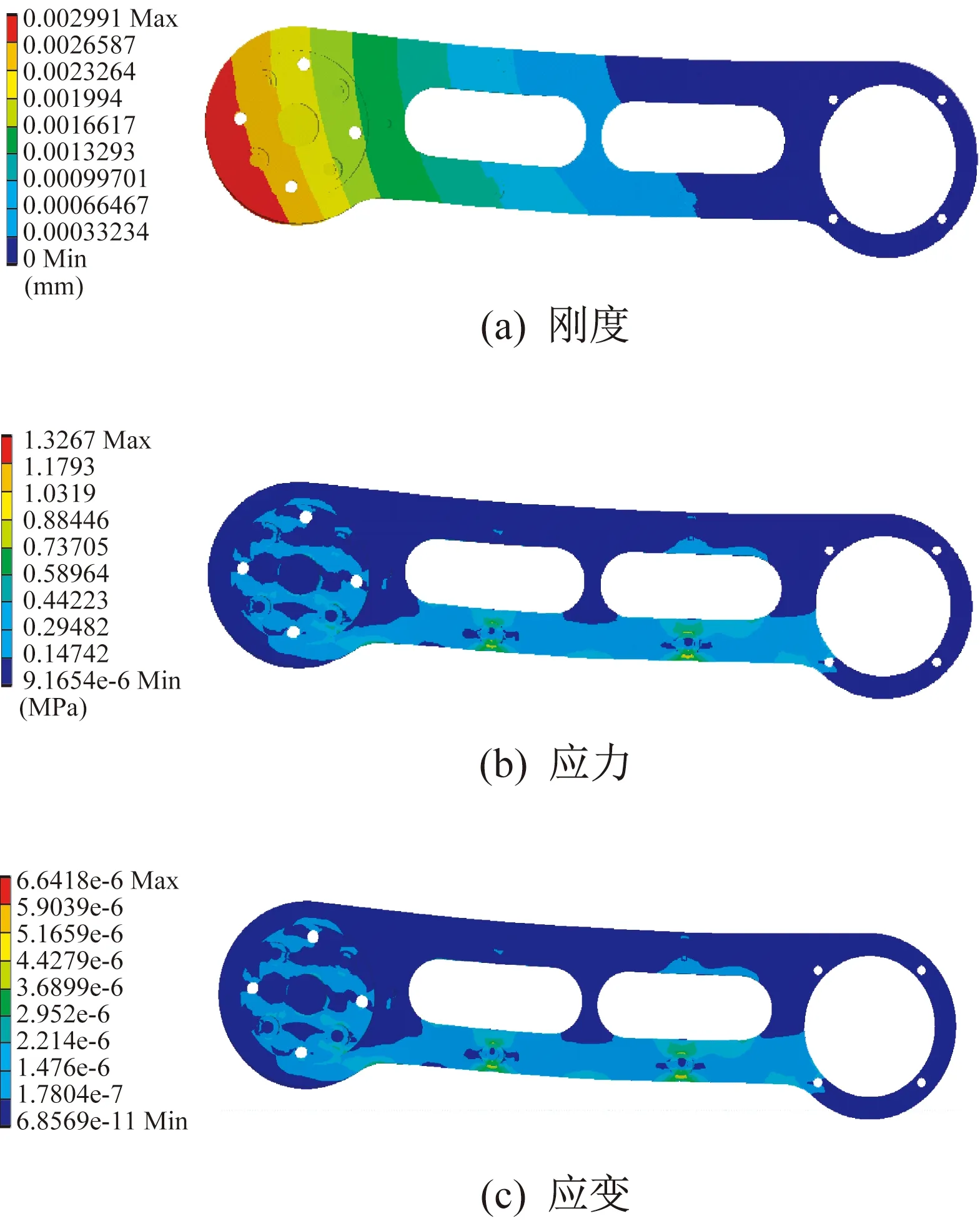
圖5 大臂豎直放置分析云圖
水平放置的小臂剛度、應力、應變云圖如圖6所示,豎直放置的小臂剛度、應力、應變云圖如圖7所示。

圖6 小臂水平放置分析云圖
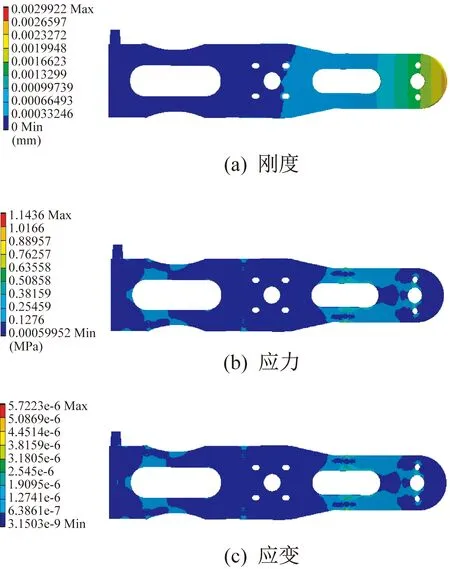
圖7 小臂豎直放置分析云圖
根據分析結果可以看出,大臂和小臂在水平或豎直方向受力時,剛度均較好,大臂在水平放置時最大變形為0.045 mm,小臂在水平放置時最大變形為0.057 mm,可以滿足零部件使用要求。對大臂和小臂的應力、應變進行分析,可以得到應力、應變均在安全范圍內,最大應力出現在螺栓沉頭孔邊緣尖銳處,在此處增加倒角或倒圓角,可以有效改善應力分布。通過分析確認,大臂和小臂可以滿足使用要求。
6 結束語
筆者對處于水平和豎直放置的六自由度機械手大臂和小臂進行了靜力學分析,獲得剛度、應力、應變云圖。通過分析確認,現有結構可以很好地滿足六自由度機械手的使用要求。所做分析為后續類似機械手的研究設計提供了數據參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
