一種高精度加速度計標定方法
2022-05-30 16:58:14盧克文王新龍王彬聶光皓胡曉東
航空兵器 2022年5期
盧克文 王新龍 王彬 聶光皓 胡曉東

摘 要:? 離心機標定能夠持續提供大于1g的向心加速度,可以充分激勵加速度計的高階非線性項,已經成為標定高精度加速度計最常用的方法。但受試驗設備誤差的影響,傳統的離心機標定模型精度較低,從而導致傳統標定方法的標定精度較差,為此, 本文提出了一種高精度加速度計標定方法。通過引入數理統計學中半參數回歸的思想,將試驗設備誤差引起的系統誤差視為非參數向量,建立了一種包含試驗設備誤差的高精度半參數標定模型,進而采用自然樣條半參數估計法對待標定參數和非參數向量進行估計,消除試驗設備誤差對待標定參數標定精度的影響。仿真驗證表明,所提方法可以有效估計由試驗設備誤差引起的系統誤差,具有比傳統標定方法更高的標定精度。
關鍵詞: 加速度計;離心機標定;試驗設備誤差;半參數回歸;非參數向量;慣性導航
中圖分類號:? TJ76;V249.32+2
文獻標識碼:A
文章編號: 1673-5048(2022)05-0088-06
DOI: 10.12132/ISSN.1673-5048.2022.0047
0 引? 言
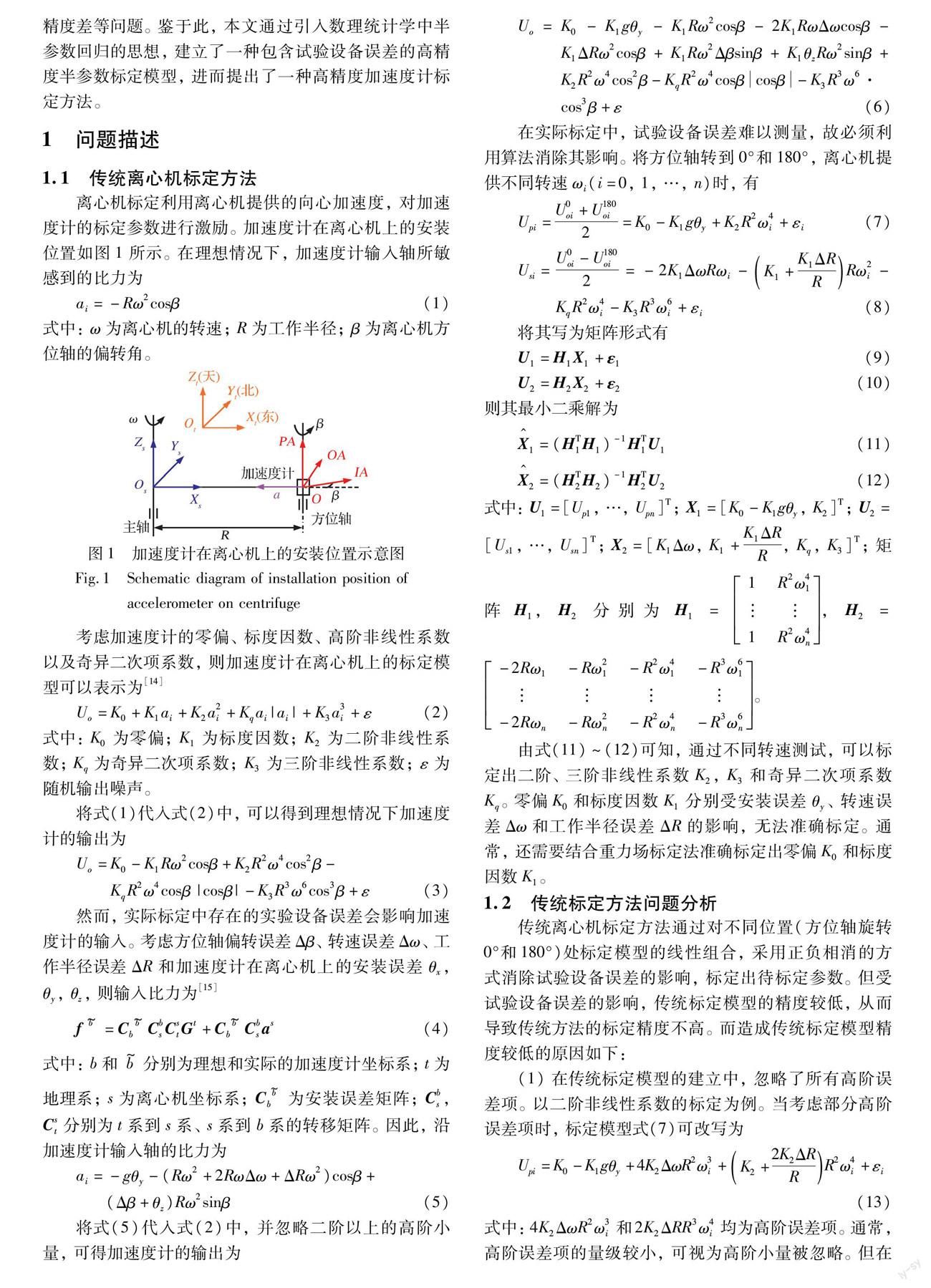
加速度計是慣性導航系統的核心元件之一,被廣泛應用于航空、航天、工業自動化等軍事和民用領域[1-2]。精確標定加速度計,對于提高慣性導航系統導航精度具有重要意義[3-4]。
目前,加速度計的標定方法可以分為重力場標定和離心機標定[5-6]。重力場標定利用轉臺或分度頭改變重力加速度在加速度計各軸上的分量,標定出待標定參數[7-9]。由于重力加速度易于獲得,且可以精確測量,故重力場標定具有成本低、精度高等優點。但重力場標定只能產生±1g的輸入,不能充分激勵加速度計的高階非線性項,故無法準確標定高階非線性系數。離心機標定能持續提供大于1g的向心加速度,可以充分激勵高階非線性項,已經成為標定高精度加速度計最常用的方法[10]。但離心機自身存在的誤差、加速度計在離心機上的安裝誤差等試驗設備誤差均會影響加速度計的標定精度。因此,如何消除試驗設備誤差對標定精度的影響,是離心機標定方法研究的重點。
通常,在對加速度計進行離心機標定時,試驗設備誤差的處理方法主要分為兩類:基于外部設備的測量法和基于標定模型的消除法。第一種方法利用光學儀器直接測量試驗設備誤差,并對離心機提供的比力輸入進行實時補償,消除試驗設備誤差對標定精度的影響[11]。這種方法簡單有效,不需對試驗設備誤差進行建模,但增加了硬件成本,而且對儀器測量精度和測試環境的要求較高。而第二種方法通過精確建立含有試驗設備誤差的標定模型,并將不同位置處的標定模型進行線性組合,采用正負相消的方式消除試驗設備誤差的影響。這種方法不需增加外部設備,只需對加速度計的輸出數據進行處理,即可消除部分試驗設備誤差的影響,因此得到了廣泛的應用[12-13]。但是受復雜試驗設備誤差的影響,傳統標定模型的精度較低,從而導致這種方法對待標定參數的標定精度較差。
從以上分析可知,現有離心機標定方法存在對儀器測量精度和測試環境要求高、標定模型精度低導致標定
精度差等問題。鑒于此,本文通過引入數理統計學中半參數回歸的思想,建立了一種包含試驗設備誤差的高精度半參數標定模型,進而提出了一種高精度加速度計標定方法。
3 仿真驗證與分析
3.1 仿真條件
加速度計零偏為1 mV,標度因數為1 V/g,二階非線性系數為1×10-5 V/g2,奇異二次項系數為1×10-5 V/g2,三階非線性系數為1×10-8 V/g3,隨機輸出噪聲的方差為1×10-5 V。加速度計在離心機上的三個安裝誤差角均為5′,離心機方位軸偏轉角誤差為1′,離心機的轉速誤差為0.05 rad/s,工作半徑誤差為0.05 m,重力加速度的大小為9.78 m/s2。采用所提標定方法對加速度計進行標定,并與傳統標定方法及不考慮試驗設備誤差時的標定結果進行對比,驗證所提方法的先進性與有效性。
3.2 仿真結果與分析
當方位軸偏轉角為βj=2πj/n(j=0, 1, …, 11),離心機轉速為10 rad/s,工作半徑為1 m時,采用所提方法對加速度計進行標定,并與不考慮試驗設備誤差時的標定結果進行對比。表1和表2分別為不考慮試驗設備誤差和所提方法的標定結果。圖2所示為所提方法的非參數向量估計結果。
由表1~2可以看出,所提方法具有比不考慮試驗設備誤差時精度更高的標定結果,表明所提方法可以有效消除試驗設備誤差的影響,提高標定精度。另外,結合圖2可知,所提方法估計所得的非參數向量與試驗設備誤差引起的系統誤差變化趨勢一致,表明所提方法可以通過有效估計系統誤差來提高待標定參數的標定精度。
另外,將方位軸分別轉到0°和180°,改變離心機轉速,使其從1 rad/s逐漸增加到12 rad/s。采用傳統離心機標定方法對加速度計進行標定。表3所示為傳統方法的標定結果。
通過將表1~3中的數據進行對比可以看出,傳統方法也具有比不考慮試驗設備誤差時精度更高的標定結果,表明傳統方法也能消除試驗設備誤差的影響,提高標定精度。但由于傳統標定模型忽略了所有高階誤差項,故標定精度比所提方法低。另外,傳統方法無法將零偏、標度因數與試驗設備誤差進行分離,故零偏和標度因數的標定精度較差,還需利用重力場標定法才能精確標定零偏和標度因數。而所提方法可以同時對所有待標定參數進行精確標定,不需增加標定成本。
為了進一步驗證所提方法的性能,在加速度計輸出中添加誤差ΔUk=2×10-5δk(k=1, 2, …, 12),并將其作為未建模試驗設備誤差引起的系統誤差。其中,δk為0~10之間的隨機數。表4所示為傳統方法和所提方法的標定結果。圖3所示為非參數向量的估計結果。圖4所示為利用標定所得的標定參數對加速度計輸出進行補償后的殘余輸出誤差。
由表4可知,當加速度計的輸出中含有未建模試驗設備誤差引起的系統誤差時,所提方法具有更高的標定精度。傳統離心機標定模型忽略了由未建模試驗設備誤差引起的系統誤差,使得標定模型的精度較低,從而導致待標定參數的標定精度顯著下降。而由圖3可知,當利用所建立的高精度半參數標定模型進行標定時,所提方法可以有效估計由未建模試驗設備誤差引起的系統誤差,以消除其對標定精度的影響。另外,由圖4可知,當利用兩種方法所得的標定參數對加速度計的輸出進行誤差補償后,傳統方法的結果中仍含有較大的殘余輸出誤差,并且殘余輸出誤差不具有隨機噪聲特性。而所提方法結果中的殘差輸出誤差較小,并且具有隨機性,這進一步說明所提方法可以有效消除由未建模試驗設備誤差引起的系統誤差的影響。
4 結? 論
精確標定加速度計的標定參數,是提高慣性導航系統導航精度的重要手段之一。本文分析了傳統離心機標定方法及其存在的問題,進而提出了一種高精度加速度計標定方法。通過理論分析與性能驗證,可以得到以下結論:
(1) 由于忽略了量級較大的高階誤差項,并且沒有考慮未建模試驗設備誤差的影響,傳統離心機標定模型的精度較低,從而導致傳統離心機標定方法的標定精度較差。
(2) 所提方法將試驗設備誤差引起的系統誤差視為非參數向量,建立了一種高精度的半參數標定模型。所建立的半參數標定模型綜合考慮了量級較大的高階誤差項以及未建模試驗設備誤差的影響,具有比傳統標定模型更高的精度。
(3) 所提方法采用自然樣條半參數估計法實現了對待標定參數和非參數向量的有效估計。通過估計非參數向量,消除了由試驗設備誤差引起的系統誤差對待標定參數標定精度的影響。仿真驗證表明,所提方法可有效估計由試驗設備誤差引起的系統誤差,具有比傳統標定方法更高的標定精度。
參考文獻:
[1] Zhang C X, Wang X, Song L L, et al. Temperature Hysteresis Mechanism and Compensation of Quartz Flexible Accelerometer in Aerial Inertial Navigation System[J]. Sensors, 2021, 21(1): 294.
[2] Li Q, Xu W, Chen X D. Investigation on Vibration Analysis of Quartz Flexible Accelerometer with Permutation Entropy[C]∥11th World Congress on Intelligent Control and Automation, 2014: 3200-3203.
[3] Zhang C X, Dai M P, Luo W, et al. High Precision Tri-Axial Quartz Flexible Accelerometers Resolution Measurement Method Based on Tri-Axial Turntable[J]. IEEE Access, 2020, 8: 53463-53470.
[4] He Q N, Zeng C J, He X X, et al. Calibrating Accelerometers for Space-Stable Inertial Navigation Systems at System Level[J]. Measurement, 2018, 127: 472-480.
[5] 廖建平, 尹曉麗, 李曉婷. 加速度計的離心加速度場翻滾校準方法[J]. 中國慣性技術學報, 2017, 25(4): 550-554.
Liao Jianping, Yin Xiaoli, Li Xiaoting. Tumbling Calibration Method for Accelerometer in Centrifugal Acceleration Field[J]. Journal of Chinese Inertial Technology, 2017, 25(4): 550-554.(in Chinese)
[6] 張睿哲, 劉玉縣, 何春華, 等. MIMU中加速度計組離心機標定補償技術研究[J]. 傳感器與微系統, 2021, 40(10): 36-39.
Zhang Ruizhe, Liu Yuxian, He Chunhua, et al. Research on Centrifuge Calibration and Compensation Technology of Accelerometer Group in MIMU[J]. Transducer and Microsystem Technologies, 2021, 40(10): 36-39.(in Chinese)
[7] 徐仕會. 加速度計交叉耦合系數高精度標定[J]. 指揮控制與仿真, 2016, 38(3): 136-139.
Xu Shihui. Precise Calibration for Accelerometer Cross Coupling Coefficient[J]. Command Control & Simulation, 2016, 38(3): 136-139.(in Chinese)
[8] 于湘濤, 張蘭, 陳格非, 等. 基于微粒群算法優化支持向量機的加速度計靜態模型辨識[J]. 中國慣性技術學報, 2010, 18(3): 347-350.
Yu Xiangtao, Zhang Lan, Chen Gefei, et al. Identification of Accelerometer Static Model Based on Support Vector Machine with Particle Swarm Optimization[J]. Journal of Chinese Inertial Technology, 2010, 18(3): 347-350.(in Chinese)
[9] 董春梅, 陳希軍, 劉慶博, 等. 正交雙加速度計兩種安裝位置在重力場中的標定方法[J]. 中國慣性技術學報, 2014, 22(5): 693-700.
Dong Chunmei, Chen Xijun, Liu Qingbo, et al. Calibration Method for Dual Orthogonal Accelerometers at Two Combinational Installing Positions in 1g Field[J]. Journal of Chinese Inertial Technology, 2014, 22(5): 693-700.(in Chinese)
[10] Sohrabi H, Ebadollahi S. Accuracy Enhancement of MEMS Acce-lerometer by Determining Its Nonlinear Coefficients Using Centrifuge Test[J]. Measurement, 2017, 112: 29-37.
[11] Wang S M, Ren S Q. Calibration of Cross Quadratic Term of Gyro Accelerometer on Centrifuge and Error Analysis[J]. Aerospace Science and Technology, 2015, 43: 30-36.
[12] 黃欽文, 楊少華, 董顯山, 等. 加速度計標定中靜態半徑誤差項的消除技術[J]. 中國慣性技術學報, 2018, 26(1): 122-126.
Huang Qinwen, Yang Shaohua, Dong Xianshan, et al. Elimination of Static Radius Error Term in Accelerometer Calibration[J]. Journal of Chinese Inertial Technology, 2018, 26(1): 122-126.(in Chinese)
[13] Ye L, Guo Y, Su S W. An Efficient Autocalibration Method for Triaxial Accelerometer[J]. IEEE Transactions on Instrumentation and Measurement, 2017, 66(9): 2380-2390.
[14] 孫闖, 任順清, 王振桓. 加速度計在精密離心機上的標定方法與誤差分析[J]. 中國慣性技術學報, 2019, 27(1): 121-128.
Sun Chuang, Ren Shunqing, Wang Zhenhuan. Calibration Method of Accelerometer on Precision Centrifuge and Its Error Analysis[J]. Journal of Chinese Inertial Technology, 2019, 27(1): 121-128.(in Chinese)
[15] 趙剡, 張少辰, 胡濤. 慣性測量組件離心機標定及誤差分析方法[J]. 北京理工大學學報, 2015, 35(4): 414-420.
Zhao Yan, Zhang Shaochen, Hu Tao. A Calibration and Error Analysis Method for IMU Using Centrifuge[J]. Transactions of Beijing Institute of Technology, 2015, 35(4): 414-420.(in Chinese)
[16] IEEE Recommended Practice for Precision Centrifuge Testing of Linear Accelerometers[C]∥IEEE standard 836-2009, 2009: 1-96.
A High Precision Accelerometer Calibration Method
Lu Kewen1,Wang Xinlong1*,Wang Bin2,Nie Guanghao2,Hu Xiaodong3
(1. School of Astronautics,Beihang University,Beijing 100083,China;
2. Beijing Institute of Control & Electronic Technology,Beijing 100038,China;
3.AVIC Xian Flight Automatic Control Research Institute,Xian 710065,China)
Abstract: Centrifuge calibration can continuously provide centripetal acceleration of more than 1g, and can fully stimulate the high-order nonlinear term of accelerometer. It has become the most commonly used method to calibrate high-precision accelerometer. However, affected by the error of test equipment, the accuracy of the traditional centrifuge calibration model is low, which leads to the low calibration accuracy of the traditional calibration method. Therefore, a high-precision accelerometer centrifuge calibration method is proposed in this paper. By introducing the idea of semi-parametric regression in mathematical statistics, the system error caused by the error of test equipment is regarded as a non-parametric vector, and a high-precision semi-parametric calibration model including the error of test equipment is established. Then the natural spline semi-parametric estimation method is used to estimate the calibration parameters and the non-parametric vector, so as to eliminate the influence of test equipment error on the calibration accuracy of calibration parameters. Simulation results show that the proposed method can effectively estimate the system error caused by the error of test equipment, and has higher calibration accuracy than the traditional calibration method.
Key words: accelerometer;centrifuge calibration;test equipment error;semi-parametric regression;non-parametric vector; inertial navigation
收稿日期:2022-03-10
基金項目: 國家自然科學基金項目(61673040); 重點基礎研究項目(2020-JCJQ-ZD-136-12); 航空科學基金項目(20170151002); 天地一體化信息技術國家重點實驗室基金項目(2015-SGIIT-KFJJ-DH-01)
作者簡介:盧克文(1996-),男,河南新鄉人,博士研究生。
通信作者:王新龍(1969-),男,陜西渭南人,教授。
